基于地磁与红外双模探测的海洋浮标预警系统设计
2017-11-17赵铁虎阮大双
赵铁虎 ,齐 君 ,阮大双 ,单 瑞
(1.青岛海洋地质研究所,山东 青岛 266071;2.海洋国家实验室海洋矿产资源评价与探测技术功能实验室,山东青岛 266071;3.杭州电子科技大学,浙江 杭州 310018)
基于地磁与红外双模探测的海洋浮标预警系统设计
赵铁虎1,2,齐 君1,2,阮大双3,单 瑞1,2
(1.青岛海洋地质研究所,山东 青岛 266071;2.海洋国家实验室海洋矿产资源评价与探测技术功能实验室,山东青岛 266071;3.杭州电子科技大学,浙江 杭州 310018)
设计了一种基于地磁检测与红外感应相结合、可对浮标周围异常目标进行探测和预警的控制系统。系统采用芯片级的微型磁感线圈,以及高集成度、低功耗的数据采集与总线技术,通过探测船体磁性对地磁场的扰动,监测船舶对浮标的靠近;采用芯片级的热释电红外传感器,通过探测人体红外辐射,监测浮标在正常工作期间未知人员的入侵。系统的预警采用声光报警和图像远程传输相结合的方式,现场采集的图像数据经过压缩编码后通过无线数传电台发送至远程岸基监测站,实现海洋浮标的远程预警与现场取证功能。
海洋浮标;地磁检测;红外感应;无线数传
海洋浮标是海洋环境、气象预报和海洋灾害预测预警的主要监测手段,我国在近海区域布放了成千上万个基于各类不同业务项目的浮标系统,由于浮标全天候、长期连续、定点监测海洋水文环境和气象[1-2],因此极易遭受到渔业活动和过往船只等客观与主观因素的破坏。随着我国海洋观测、监测业务活动的全面开展,使得设计一种浮标安全自动监测系统的必要性与迫切性日益提高。
本文设计了一种基于地磁检测技术[3-4]、热释电红外感应技术与数据无线传输技术的海洋浮标预警系统,系统由“检测单元”和“预警单元”两部分组成。“检测单元”主要由地磁传感器、热释电红外传感器以及各自的数据采集处理电路组成,“预警单元”主要由步进电机驱动器、限位检测开关、CMOS图像传感器和数据无线收发模块组成。系统以STM32F407处理器为核心,实现自动采集数据、自动预警和发送数据等功能。
1 系统总体方案
系统整体框图如图1所示。磁传感器采集浮标周围环境磁场,将测量的磁场数据以RS485通信方式发送至微控制器。微控制器计算当前环境磁场值与正常环境磁场值的差异值,根据差异值与系统设定的报警阈值比较,判断浮标平台周围船只运动情况。当计算的差异值超过报警阈值,微控制触发探测组件中的红外传感器工作,检测是否有人员靠近浮标,并根据4个探测组件中的红外传感器的反馈检测信号,大致定位人员靠近方位同时控制步进电机转动至定位的方位,待转动至指定方位后触发图像传感器采集现场图片,最后将现场图像数据通过DTU无线传输平台发送至岸边基站,实现浮标报警监测。
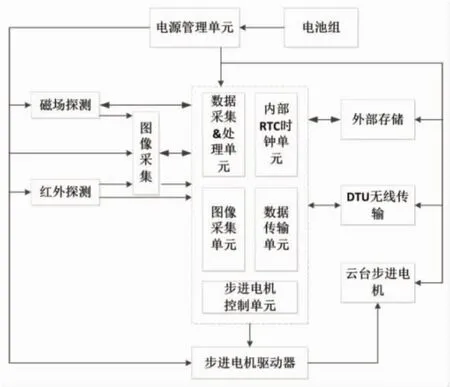
图1 系统硬件结构框图
2 双模探测原理介绍
本系统采用地磁检测和红外感应相结合对海洋浮标周围异常目标进行探测和预警,其中地磁检测主要通过探测过往轮船等铁磁性物体对浮标周围地磁场的扰动现象[4-5],进而判别浮标周围是否有船只靠近情况;红外感应探测是通过热释电红外传感器检测浮标平台周围特定波长(人体向外辐射的红外光)的红外光情况,进而识别浮标周围是否有人员靠近。系统布局如图2所示,1号与3号,2号与4号探头的磁感应轴布放位置两两相同。
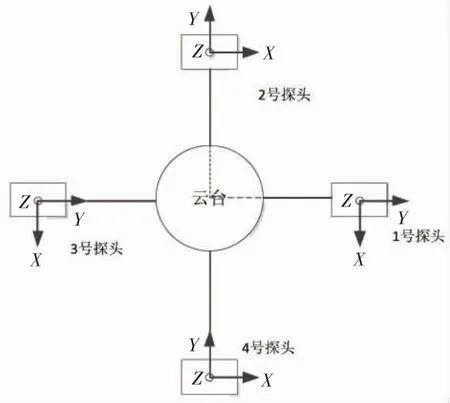
图2 系统布局示意图
在实际测量中存在环境磁场噪声,为了抑制因环境噪声干扰影响系统对磁性目标探测的准确性和稳定性。由于三分量梯度仪在实际测量中对背景磁场噪声具有一定的抗干扰性,故本文在系统布局设计时,提出一种梯度放置设计布局如图2所示。图2中的1号与3号、2号与4号探测单元中的三轴磁传感器的摆放位置相互一致,实现在探测磁性目标时产生梯度测量效果。
2.1 地磁探测原理
由于铁磁性物质如管道、汽车和轮船等因受到地球磁场的磁化而产生感应磁场,产生的感应磁场会扰动其周围磁场分布情况。根据这种磁异常现象可以通过测量物体周围磁场的分布情况实现对铁磁性物质的探测与识别。本文中采用一种基于微型磁感线圈的芯片级的三轴磁传感器MicroMag3,其工作原理是基于法拉第电磁感应定律[6]:

式中:Vi表示线圈感应电压;Φ为线圈中的磁通量;N为线圈匝数;Ae为线圈横截面;H为磁场强度;μe为磁芯的相对磁导率。
MicroMag3 磁传感器测量范围:±11 Gauss,分辨率:15 mGauss,完全满足本文设计要求。其内部主要由磁感应线圈、电阻、数字开关和比较器组成的振荡电路,在使用时可以通过SPI串行通信向该传感器发送命令字节设置相应的方向轴测量。
2.2 红外探测原理
人体红外辐射原理主要基于基尔霍夫定律和普朗克分布定律[7]。其中由基尔霍夫定律得出,在一定温度条件下,热平衡的物体的辐射能量与吸收能量成正比;普朗克分布定律阐述了物体辐射能量在不同温度下辐射波长的分布定律,其数学公式为:

式中:Ebλ表示黑体辐射度;C1表示第一辐射常数,C1=3.7415×108W*cm-2*μm4;C2表示第二辐射常数,C2=1.43879×104μm*K;λ 表示波长;T 表示绝对温度。
正常状态下,人体会不断地辐射红外线,且波长稳定在10 μm。根据这一现象可以利用热释电红外传感器识别人体。其中,热释电红外传感器主要通过热释电效应原理:由于外界温度的变化,导致热释电晶体和压电陶瓷发生电荷中心相对移动,使得在晶体两端产生异性的束缚电荷。由于热释电红外传感器的可探测波长范围为0.2~20 μm,因此需要在其感光器件前添加干涉滤光片,滤除噪声波长。另外,通过在传感器前添加菲涅尔透镜,放大检测距离和范围。文中选用一款标准双元设计热释电红外传感器LHI778,其内部含有一个双元释热陶瓷元件和FET相连,使其具有高灵敏度和较好的共模抑制比。本系统中选用的LHI778型热释电红外传感器,其主要性能参数如表1所示。
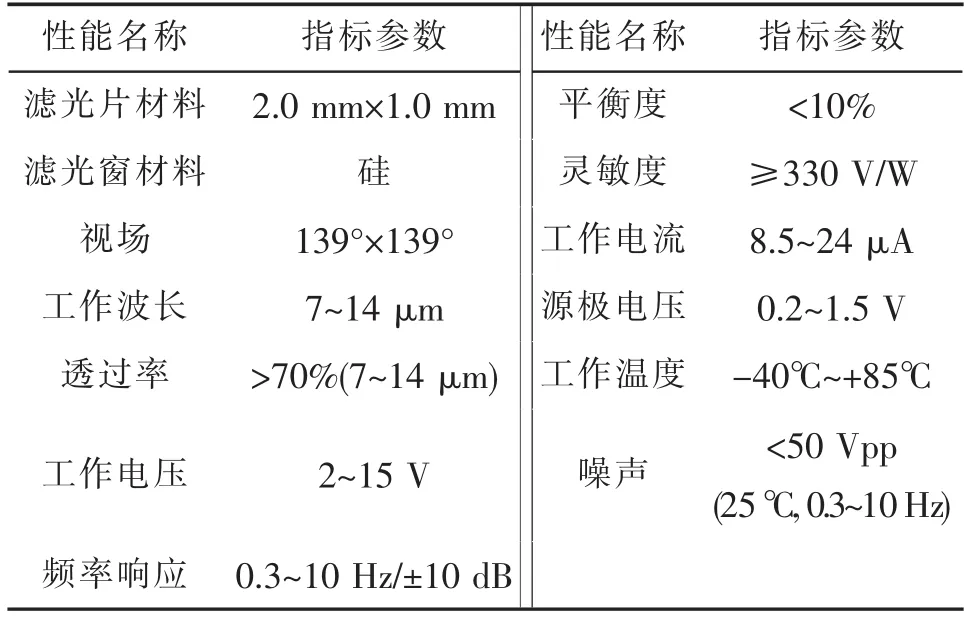
表1 LHI778型热释电红外传感器性能参数
3 系统设计与实现
系统设计包含系统硬件电路设计和软件实现。其中,系统硬件电路设计主要包括图像采集、磁场探测、微处理器外围电路和红外探测等。软件实现主要包括系统工作流程图、磁探测与红外探测流程图和图像采集流程图等。
3.1 系统硬件电路设计
本小节主要介绍磁场探测、红外检测和图像采集等相关电路原理的设计及分析。
3.1.1 磁场探测电路设计 微型磁感线圈的芯片级3轴磁传感器MicroMag3,其最大测量范围±1 100 uT,最小分辨率15 nT,采样频率最高可达2 kHz,在3 V的工作电压下,工作电流小于500 μA,工作功耗低。自带SPI通信接口,可直接与微控制器I/O连接,电路原理图如图3所示。
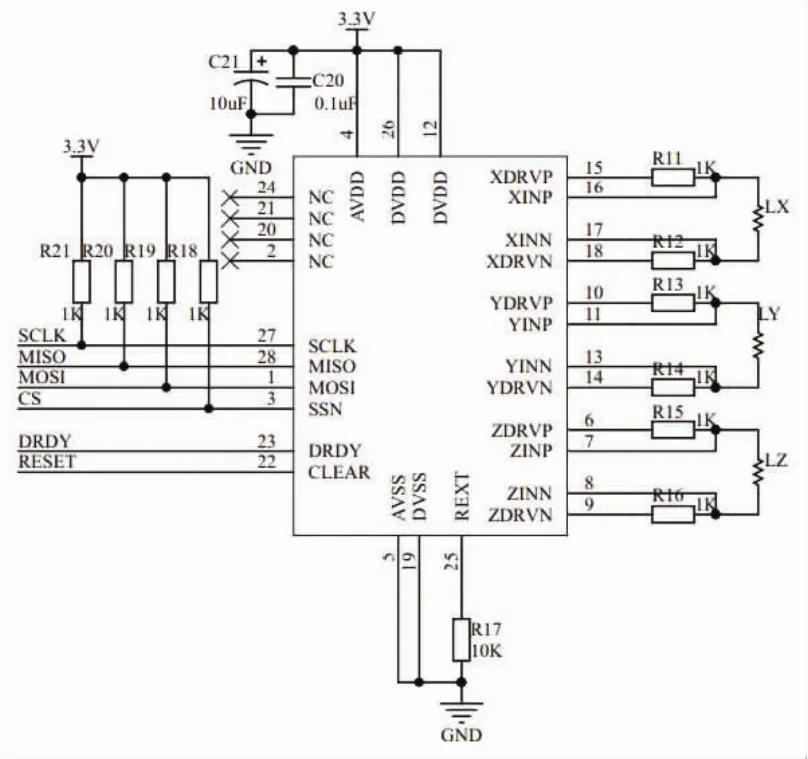
图3 磁场探测电路
其中图 3 中 SCLK、MISO、MOSI、CS 外接上拉电阻后与微控制器SPI通信端口相连接,DRDY与微控制器外部中断端口相连接,RESET与微控制器GPIO口相连接。
3.1.2 红外检测电路设计 红外探测采用热释电传感器LHI778探头和BISS0001,其中LHI778具有灵敏度高、可靠性强,低工作电压等特点,BISS0001内部具有独立运算放大器和内设延时时间定时器和封锁时间定时器,电路原理如图4所示。
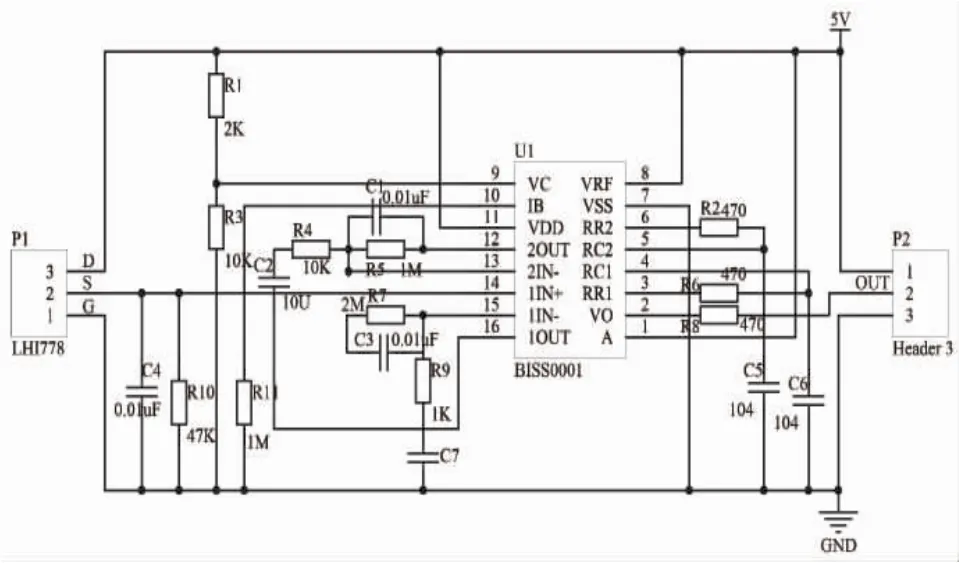
图4 红外探测电路
图4中LHI778的输出引脚经无源RC滤波后接入BISS0001的第一级运算放大器的同相输入端,再经过内部二级运算放大器和双向鉴幅器后,由信号输出端Vo输出。其中BISS0001的1引脚是重复触发控制端,当该引脚被置于高电平时,使能重复触发,被置于低电平时,失能重复触发,在本电路中,引脚1被置于高电平,允许电路重复触发。
3.1.3 图像采集电路设计 图像采集采用OV2640低电压CMOS图像传感器,该传感器具有8/10bits RGB图像数据接口。对于输出10位RGB图像使用D[9:0];对于输出8位的YCbCr/RGB图像使用D[9:2]。其中引脚Href/Vsync,通过SCCB(Serial Camera Control Bus)设置Href功能或Vsync功能;引脚SIOC和SIOD外接4.7 kΩ的上拉电阻;引脚RESETB通过GPIO端口拉低引脚电平触发OV2640复位工作,或在RESETB引脚外接上拉电阻至DOVDD时,通过SCCB控制OV2640复位工作;引脚PWDN通过GPIO端口拉高引脚电平触发工作,或在PWDN引脚外接下拉电阻至DGND时,通过SCCB控制工作,电路原理图如图5所示。
3.2 软件实现
本系统软件实现均在Keil5嵌入式开发环境下设计实现。在本小节主要对系统主流程程序和数据采集处理流程程序进行详细分析。
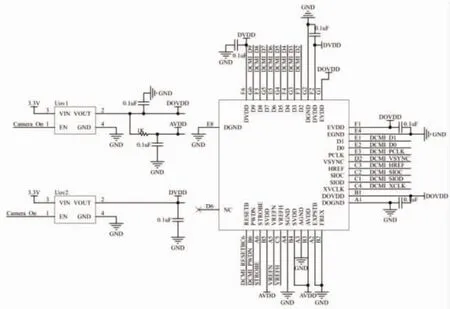
图5 图像采集电路
3.2.1 系统主流程程序 主程序中包括系统初始化、DTU初始化设置和指令分析等流程。其中系统初始化主要对系统时钟、I/O口、USART、SPI和DCMI初始化设置;DTU初始化主要通过微控制串口与DTU模块通信,配置其短信模式、远程接收端IP地址、端口号等;指令分析主要分析远程接收端发送的指令信息(设防指令、查看指令和撤防指令),设防指令用于实时采集现场磁场数据、红外探测数据,并根据磁场数据的变化情况检测是否有船只、人员靠近。查看指令用于读取图像传感器采集的图像数据,并将图像数据发送至远程岸基接收站,便于岸边监控人员查看浮标周围情况。撤防指令用于关闭磁探测、红外探测等数据采集功能,使系统进入休眠模式,降低系统功耗。程序流程如图6所示。
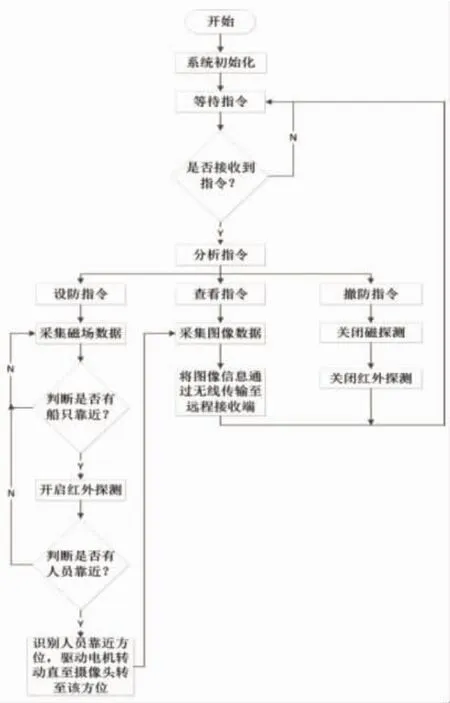
图6 系统流程框图
3.2.2 数据采集处理程序 微控制器读取磁传感器采集数据,采样频率为10 Hz,再将两次数据相减并将差值与预设的阈值相比较,若检测值超出阈值微控制器会打开红外探测,反之则采集下一次磁传感器数据,地磁探测与图像采集流程如图7所示。
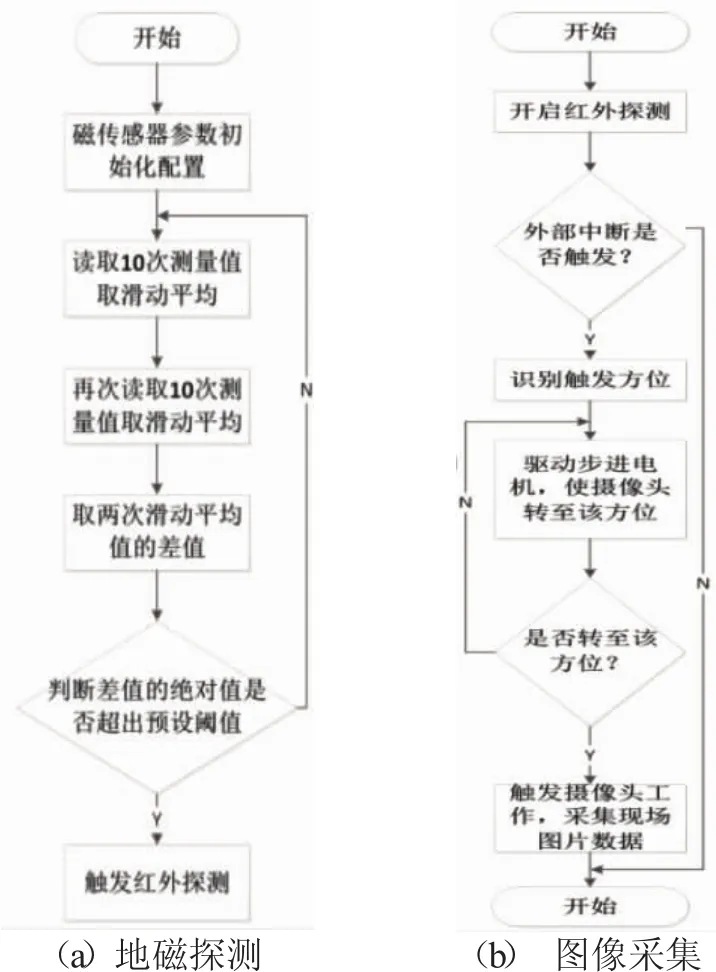
图7 流程图
4 系统测试与仿真
4.1 系统测试方案制定
(1)测试场地:选择户外空旷场地
(2)测试对象:小型轿车和人员
(3)测试内容:测试平台周围环境磁场扰动情况、人员靠近情况和周围图像采集情况。
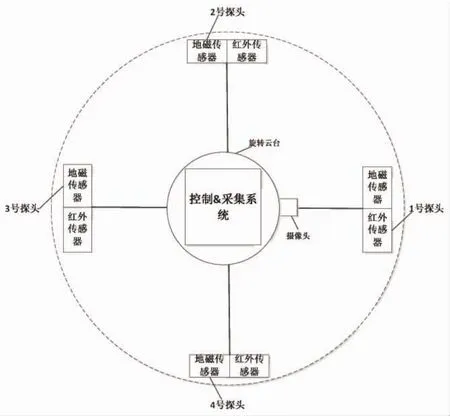
图8 系统测试结构框图
4.2 测试实验过程
系统测试内容主要包括如下部分:
(1)当因车辆在平台周围移动时,系统能否实时、精确地感知到周围地磁场的变化情况;
(2)当有人员靠近平台时,系统能否及时识别并做出响应;
(3)当系统检测到平台周围发生异常活动时,系统能够采集现场图像数据并传回至远程监测点;
系统测试现场安装图如图8户外测试结构框图所示,平台组装步骤如下:
(1)在户外选择一处空旷场地(减少因外界活动产生的磁场扰动干扰),将测试旋转云台平稳安置;
(2)分别在东西南北四个方向上放置探测组件(包含磁传感器和红外传感器)并分别通过长2 m的线缆连接至旋转平台中的采集系统;
(3)将声光报警组件通过长3 m的线缆连接至旋转平台中的控制系统;
(4)将图像采集组件固定在旋转平台中,并连接至采集系统。

图9 测试平台现场安装图
实验测试内容见上文描述的测试方案制订,实验测试过程如下所述:
(1)启动系统工作后,在进行测试之前使系统在当前环境下工作1 min,系统根据采集到一定时间的当前背景磁场数据,再通过中值滤波算法计算得出当前背景磁场值[8-9],并将其设定环境磁场基线值;
(2)实验测试员1驾驶小型汽车从不同的方向缓慢靠近平台,实验测试员2在距离测试平台1 km左右的远程监测点通过上位机监测系统观察磁传感器采集的实时数据;
(3)实验测试员2从不同的方向多次缓慢靠近测试平台,实验人员2在远程监测点观察红外传感器采集的实时数据;
(4)测试系统识别要异常情况后,采集现场图片数据并将数据发送至远程监测点监测系统。
4.3 实验数据分析
对测试实验中不同方向的磁传感器采集到的数据和不同分辨率的图片、传输速率对传输时间的影响进行分析,并得出相应结论。实验数据分析包含以下内容:
(1)在实验测试过程中小型轿车在不同方向上靠近平台时,对各个方向的磁传感器采集的实时进行分析,实验数据对比图如图所示;
(2)在图像数据采集与传输过程中,对不同分辨率的图片和不同传输速率对传输时间影响的分析。
4.3.1 探测单元的磁传感器数据分析 各个方位的磁传感器数据测试分析结果如图10所示。
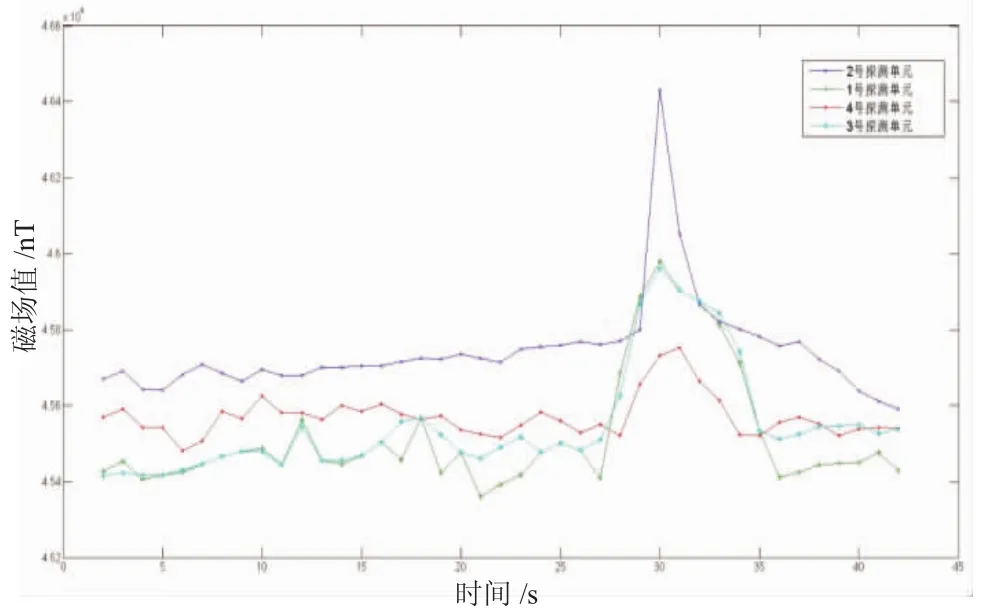
图10 磁场数据对比图
图10中显示出小型轿车在正对2号探测单元时 (各探测单元摆放位置如上文系统户外测试结构框图中描述),各方向处的磁传感器采集数据对比情况。图中显示1号和3号探测单元中磁传感器采集平台周围磁场数据变化趋势较为一致且比4号探测单元数据变化较为明显;显示离小型轿车最近的探测单元采集的磁场数据变化最为明显且平均磁场值比其他各探测单元采集的数据略大。实验测试结果符合理论公式[10]:
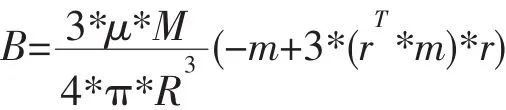
式中:B表示磁场值;μ表示磁导率;r=R/R,m=M/M。
4.3.2 不同分辨率的图片和不同传输速率对传输时间影响的分析 在图像采集与传输性能测试实验中,主要测试图像分辨率对于传输性能的影响,便于选择一种传输性能相对优化的图像分辨率。实验过程中分别对 320×240、680×480 和 1024×768 分辨率进行传输性能结果分析,性能测试结果分析如表2所示。
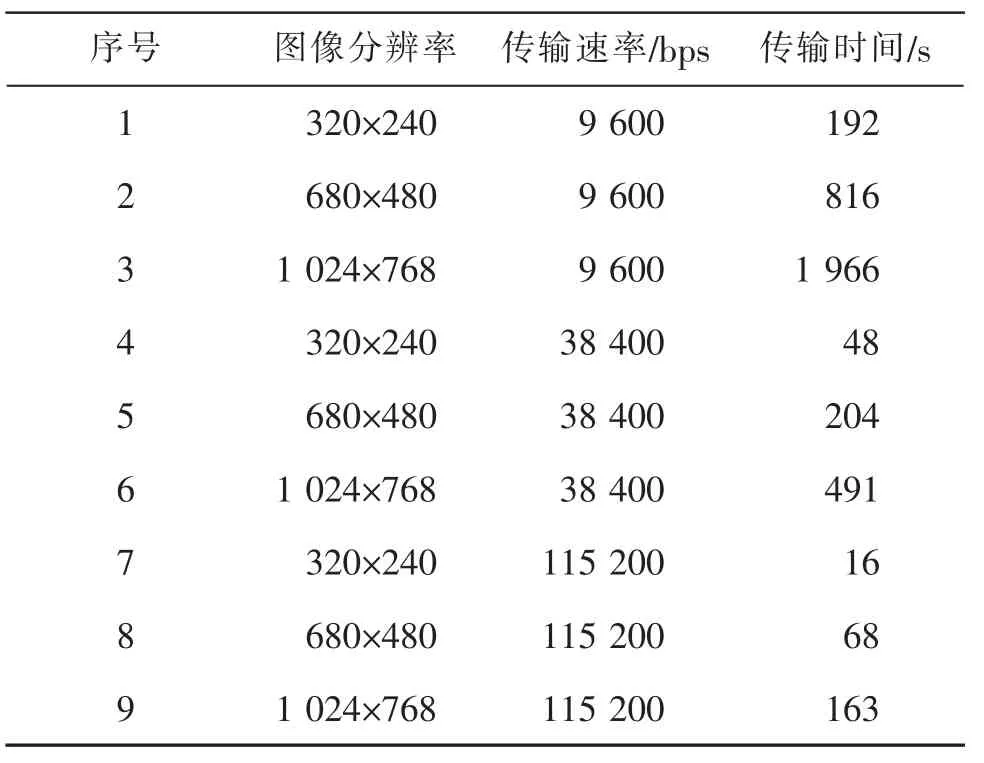
表2 图像数据传输性能对比表
5 结论
本文基于地磁传感与红外传感的双模探测技术,通过图像的采集与传输,实现了海洋浮标的预警。通过陆地模拟测试,系统的设计达到了预期要求,实现了磁性物体或人体靠近浮标时的事件检测以及图像传输。在实际海洋浮标预警应用中,系统可通过预先设定报警阈值,实现当大型船只靠近海洋浮标时,系统根据当前背景磁场值异常变化值触发报警。由于在实际的使用,所以后期仍需对当前系统进行完善和优化。
[1]赵聪蛟,何志强,周燕.浙江省海洋水质监测浮标设计与实现[J].海洋技术学报,2015(05):37-42.
[2]时海勇.大型海洋资料浮标岸站监控与管理系统开发[D].青岛:中国海洋大学,2012.
[3]Wei Q,B Yang.Adaptable Vehicle Detection and Speed Estimation for Changeable Urban Traffic With Anisotropic Magnetoresistive Sensors[J].IEEE Sensors Journal,2017,17(7):2021-2028.
[4]Liu Z,et al.Compensation of Geomagnetic Vector Measurement System With Differential Magnetic Field Method[J].IEEE Sensors Journal,2016,16(24):9006-9013.
[5]An Intelligent Intrusion Detection Scheme for Self-DrivingVehicles Based On Magnetometer Sensors.
[6]巨汉基,朱万华,方广有.磁芯感应线圈传感器综述[J].地球物理学进展,2010(05):1870-1876.
[7]孟琳.基于多角度热释电红外信息的人体身份认证研究[D].天津:天津大学,2010.
[8]路超.弱磁传感器在地磁探测应用中的功能优化研究[D].南京:南京理工大学,2008.
[9]张华强,郑宇,吕清利.地磁采集系统的数据处理方法[J].兵工自动化,2011,30(8):69-71.
[10]Lee K,MLi.Magnetic Tensor Sensor for Gradient-Based Localization ofFerrous Object in Geomagnetic Field[J].IEEE Transactions on Magnetics,2016,52(8):1-10.
Design of an Ocean Buoy Auto-Warning System Based on Geomagnetic-Infrared Detection
ZHAO Tie-hu1,2,QI Jun1,2,RUAN Da-shuang3,SHAN Rui1,2
1.Qingdao Institute of Marine Geology,Qingdao 266071,Shandong Province,China;
2.Function Laboratory of Marine Geo-Resource Evaluation and Exploration Technology,Qingdao 266071,Shandong Province,China;
3.Hangzhou Dianzi University,Hangzhou 310018,Zhejiang Province,China
This paper designs a kind of anomaly target detection and warning system based on geomagnetic detection combined with infrared induction technology.The system adopts chip level of micro magnetic induction coil,as well as the data acquisition and bus technology featured by high integration and low power consumption,so as to realize monitoring ship motion around buoy by detecting the ship magnetic disturbance of the geomagnetic field.The design uses chip level of pyroelectric infrared sensor to monitor invaded unknown persons during normal work by detecting the infrared radiation of human body.The early warning system adopts the combination of sound and light alarm and remote image transmission.The acquired image data on site are sent to the remote monitoring station via wireless digital shore-based station after compression coding,in order to achieve the function of ocean buoy remote warning and scene evidence obtaining.
ocean buoy;geomagnetic detection;infrared sensing;buoy warning
P715.2
A
1003-2029(2017)05-0015-07
10.3969/j.issn.1003-2029.2017.05.003
2017-06-05
青岛海洋科学与技术国家实验室鳌山科技创新计划资助项目“亚洲大陆边缘地质过程与资源环境效应项目”(2015ASKJ03);国家海洋地质调查专项资助项目(121201005000150012);国家自然科学基金资助项目(41406115);青岛市南区科技发展资金资助项目(2016-3-015-ZH)
赵铁虎(1962-),男,博士,研究员,主要研究方向为海洋地质地球物理调查。E-mail:thzhao2007@126.com
