航天器有限时间饱和姿态跟踪控制
2017-11-17陈海涛宋申民李学辉
陈海涛,宋申民,李学辉
(哈尔滨工业大学 控制理论与制导技术研究中心,哈尔滨 150001)
航天器有限时间饱和姿态跟踪控制
陈海涛1,宋申民1,李学辉1
(哈尔滨工业大学 控制理论与制导技术研究中心,哈尔滨 150001)
针对刚体航天器系统,对存在模型不确定性、外界干扰力矩和控制器饱和等条件下的姿态跟踪控制问题进行了研究。首先,考虑未知模型不确定性和外界干扰,且总干扰上界为未知常数,结合快速非奇异终端滑模、快速终端滑模趋近律以及辅助系统构造了基本的鲁棒有限时间饱和控制器,并通过辅助系统直接补偿了控制器饱和;其次,针对系统总干扰具有多项式上界的情形,进一步结合自适应控制算法,对其上界函数中的未知参数进行在线估计,并设计了自适应有限时间饱和控制器。同时,基于 Lyapunov稳定性理论证明了所提出控制算法的有限时间收敛特性。最后,通过数值仿真验证所提出控制算法的控制效果,在两种控制器作用下姿态的跟踪精度分别为5×10-5和1×10-5,证明了所提出控制算法的有效性。
有限时间控制;执行器饱和;辅助系统;快速非奇异终端滑模;自适应控制
终端滑模[1]控制由于其具备收敛速度快、鲁棒性强和控制精度高等优良特性,因而吸引了众多学者的关注,并涌现出大量的研究成果[2-3]。但是,文献[2-3]均要求系统不确定性的上界精确已知,这在实际系统中较难实现,因而实用性较差。当存在未知的系统不确定性时,已有的研究方法中主要通过自适应律[4-5]、神经网络[6]和观测器[7-10]等方法对系统不确定性的相关信息进行在线估计,并利用估计值进行实时反馈,形成闭环控制。然而,观测器通常要求系统不确定性是可导的,致使其适用范围严重受限。神经网络由于其自身结构较为复杂,参数难于整定,因而不适用于实时控制。此外,仅有文献[5,7,10]同时考虑了未知不确定性和星载执行机构的饱和约束等问题,但与此同时,文献[5]只获得渐近稳定特性,文献[7,10]由于未区分模型不确定性、干扰以及执行器饱和的影响,导致所设计的干扰观测器和自适应律在线计算负担的显著增加,系统性能用时也更容易受到控制器饱和效应的影响。因此,有必要进一步研究同时存在未知不确定性和执行器饱和等约束情况下的航天器姿态跟踪控制问题。
截至当前,已有多种可行的饱和控制方法。文献[11-12]通过结合特定的饱和函数构造控制器,例如双曲正切函数等,以确保控制力矩满足一定的幅值限制,但该方法只能保证系统渐近收敛,响应速度较慢,且参数整定过程较为复杂,约束较多。文献[13]结合齐次系统和双曲正切函数,既确保了控制系统有限时间稳定,同时也满足了执行器的饱和约束,但该方法无法处理未知的系统不确定性。文献[14]通过构造辅助系统直接补偿执行器饱和效应,但只能获得渐近稳定特性,且仍然假设系统不确定性上界已知,致使其控制器应用受限。
针对已有研究方法中存在的不足,通过结合终端滑模控制、快速终端滑模型趋近律、辅助系统以及自适应控制等方法进行了相应的有限时间饱和姿态跟踪控制器设计。本文的创新之处在于:①实现了姿态跟踪系统的有限时间稳定,并同时考虑执行器饱和和未知系统不确定性等问题;②基于改进的辅助系统,直接与快速非奇异终端滑模等方法相结合,既满足控制器饱和约束,也保证了系统的有限时间收敛特性。
1 航天器姿态运动学与动力学模型
选择四元数作为描述航天器姿态的参数,并建立系统的运动学模型和动力学模型如下:

2 控制器设计
首先给出快速非奇异终端滑模面的定义、辅助系统的定义以及相关引理。为了保证在滑模面上系统状态具有较快收敛速度,并且控制器无奇异,构造如下快速非奇异终端滑模面:

为解决控制器饱和问题,定义如下辅助系统:
引理1[1]:设 α1>0,α2>0,0<c<1,则有:

引理 2[1]:设则有[1]

引理3[2]:设系统存在连续可微函数满足:
1)V正定;
引理4[2]:设系统存在引理 2定义V( x),且其中,在有限时间T内到达,且满足

引理5:对于系统(1)和(2)以及滑模面(11), 若S=0,则将在有限时间内收敛到期望平衡点附近的微小邻域。





进而可得:

2.1 基本的鲁棒有限时间饱和控制器设计
本节将结合快速非奇异终端滑模、快速终端滑模型趋近律和辅助系统进行基本的姿态跟踪有限时间饱和控制器设计。为此,首先引入如下假设:
假设1[2]:综合不确定性δ具有未知上界l,使得对于i=1,2,3恒成立。
设计如下指令控制信号u:
定理1:对于姿态跟踪系统(1)和(2),若假设1成立,辅助系统设计如(17),应用控制器(30),则有如下结论:

其中,iφ定义见(34),η、1α、2α和γ定义见(11)。
证明:① 定义李雅普诺夫函数:

对V求导,并带入控制器(30)、辅助系统(17)得:

基于引理1,(42)可整理为:


结论①得证。

将其整理为如下两种形式:


整理可得:

2.2 自适应有限时间饱和控制器设计
一般情况下,综合不确定性δ的上界为系统状态的多项式函数。因此,为进一步增强本文所设计控制算法的鲁棒性、适用性,本节将结合快速非奇异终端滑模、快速终端滑模型趋近律和自适应律进行自适应有限时间饱和控制器的设计。首先,引入如下假设:
假设2[4]:综合不确定性δ的上界满足如下约束:

其中,c0、c1和c2为未知正数。
设计如下控制指令信号u:


定理2:对于姿态跟踪系统(1)和(2),若假设2成立,辅助系统设计如(17),应用控制器(57),则有如下结论:
① S在有限时间收敛到如下区间:


证明:定义李雅普诺夫函数:

对V求导,并代入控制器(57)和辅助系统(17)得:


利用引理2,(66)可整理为:

式68)可进一步整理为:


根据式(66)至式(68)以及引理2,可得:

同理,S将在有限时间内收敛至如下区域:

其中,iφ定义见式(79),η、1α、2α和γ定义见式(11)。
定理2证毕。
3 仿真分析
对所提出控制算法的有效性进行仿真验证。各仿真参数和初始条件均根据文献[4,10]确定,其中,转动惯量标称值J0、航天器初始姿态四元数q(0)、航天器初始角速度矢量ω(0)、转动惯量不确定性ΔJ、环境干扰力矩d、期望角速度dω分别为:
为了方便对仿真结果进行对比分析,假设所有仿真试验均在相同的初始条件下进行。
由上述仿真结果可得如下结论:
① 在控制器(30)和(57)作用下,姿态跟踪误差均能在有限时间内收敛于期望平衡点的微小邻域内,执行器输出力矩满足幅值限制,且均无抖振现象发生,验证了所设计控制器的有效性。
② 两组仿真试验中闭环系统姿态误差和角速度误差的稳态精度均达到允许范围内,证明所设计控制器的优越性,且控制器(57)的控制精度更高,说明了控制器(57)具有更强的鲁棒性及更高的准确性。

图1 控制器(30)作用下仿真曲线Fig.1 Curves ofunder controller (30)

图2 控制器(30)作用下仿真曲线Fig.2 Curves of angular velocity errorunder controller (30)

图3 控制器(30)作用下控制力矩曲线Fig.3 Curves of control torque by controller (30)
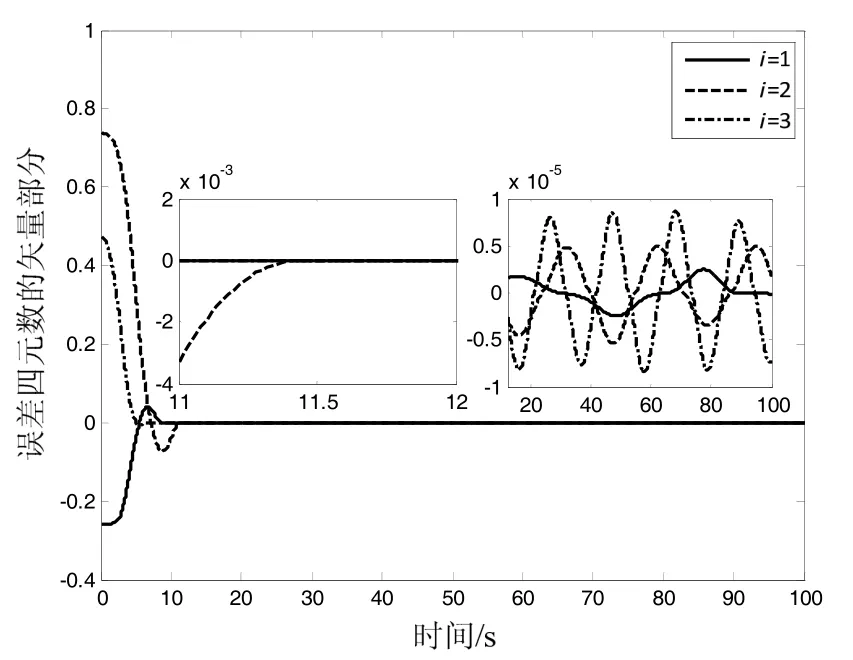
图4 控制器(57)作用下仿真曲线Fig.4 Curves of attitude errorunder controller (57)
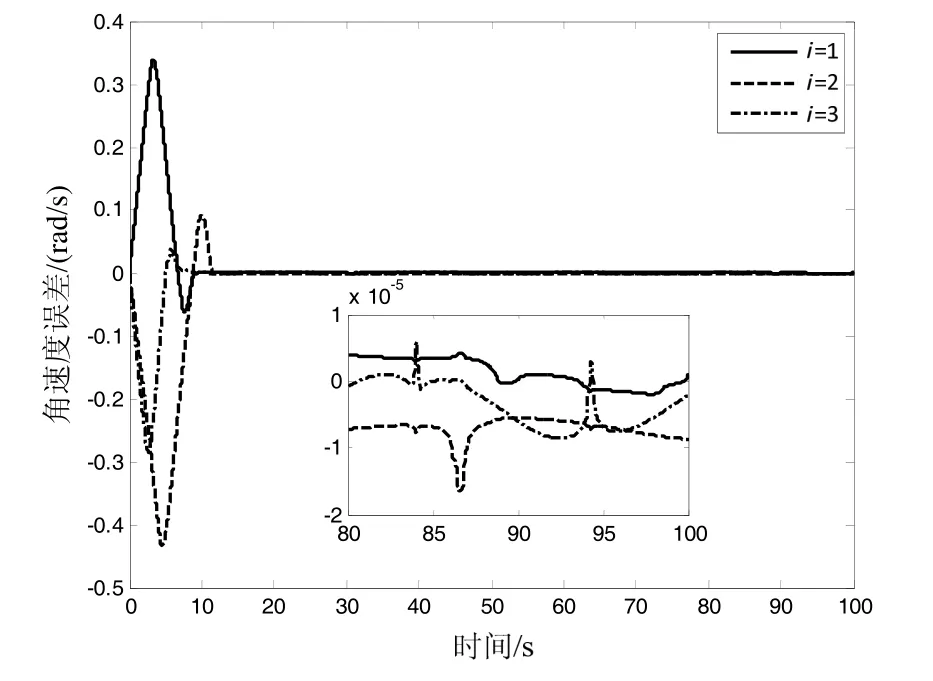
图5 控制器(57)作用下仿真曲线Fig.5 Curves of angular velocity errorunder controller (57)

图6 控制器(57)作用下控制力矩曲线Fig.6 Curves of control torque by controller (57)
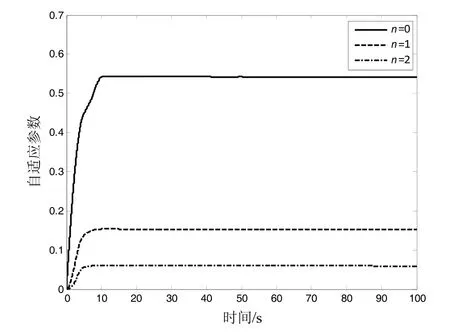
图7 自适应参数仿真曲线Fig.7 Curves of adaptive parameters
4 结 论
本文首先针对系统总干扰具有常数上界的情况,基于快速非奇异终端滑模面、快速终端滑模趋近律以及辅助系统设计了基本的鲁棒有限时间饱和控制器。其中,通过构造改进的辅助系统,使其可以直接与滑模控制方法相结合,既补偿了由执行器饱和带来的输入误差,也不影响闭环系统的有限时间收敛特性。其次,为扩大本文所提出控制算法的适用范围及其鲁棒性,进一步结合快速非奇异终端滑模面、快速终端滑模趋近律、辅助系统以及自适应控制算法,设计了自适应有限时间饱和姿态跟踪控制器。利用李雅普诺夫理论对所设计的控制器均给出了严格的理论证明,并通过数值仿真,进一步验证了所设计控制器的有效性。
(References):
[1]Yu S H, Yu X H, Shirinzadeh B, et al. Continuous finite time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964.
[2]Jin E D, Sun Z W. Robust controllers design with finite time convergence for rigid spacecraft attitude tracking control[J].Aerospace Science & Technology, 2008, 12(4): 324-330.
[3]Wu S A, Radice G, Gao Y S, et al. Quaternion-based finite time control for spacecraft attitude tracking[J]. Acta Astronautica, 2011, 69(1-2): 48-58.
[4]Lu K F, Xia Y Q. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence[J]. Automatica, 2013, 49(12): 3591-3599.
[5]宋俊红, 宋申民. 考虑输入受限和自动驾驶仪延迟的自适应滑模制导律[J]. 中国惯性技术学报, 2015, 23(3): 339-344.Song J H, Song S M. Adaptive sliding mode guidance law with input constraints and autopilot lag[J]. Journal of Chinese Inertial Technology, 2015, 23(3): 339-344.
[6]Wang L Y, Chai T Y, Zhai L F. Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics[J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3296-3304.
[7]Hu Q L, Li B, Qi J T. Disturbance observer based finitetime attitude control for rigid spacecraft under input saturation[J]. Aerospace Science & Technology, 2014, 39: 13-21.
[8]王艳敏, 冯勇, 夏红伟, 申立群. 多输入不确定系统的平滑非奇异终端滑模控制[J]. 控制与决策, 2015(1): 161-165.Wang Y M, Feng Y, Xia H W, Shen L Q. Smooth nonsingular terminal sliding mode control of uncertain multiinput systems[J]. Control and Decision, 2015(1): 161-165.
[9]周向阳, 赵蓓蕾. 惯性稳定平台扩张状态观测器/PD复合控制[J]. 中国惯性技术学报, 2017, 25(1): 6-10.Zhou X Y, Zhao B L. Extended state observer/PID compound control for inertially stabilized platform[J]. Journal of Chinese Inertial Technology, 2017, 25(1): 6-10.
[10]Lu K F, Xia Y Q, Fu M Y. Controller design for rigid spacecraft attitude tracking with actuator saturation[J].Information Sciences, 2013, 220: 343-366.
[11]Zou A M, Kumar K D, Ruiter A H J D. Robust attitude tracking control of spacecraft under control input magnitude and rate saturations[J]. International Journal of Robust& Nonlinear Control, 2016, 26(4): 799-815.
[12]Hu J C, Zhang H H. A simple saturated control framework for spacecraft with bounded disturbances[J]. International Journal of Robust & Nonlinear Control, 2015,26(3): 367-384.
[13]Hu Q L, Zhang J, Friswell M I. Finite-time coordinated attitude control for spacecraft formation flying under input saturation[J]. Journal of Dynamic Systems Measurement& Control, 2015, 137(6): 061012.
[14]Xiao B, Hu Q, Friswell M I. Active fault-tolerant attitude control for flexible spacecraft with loss of actuator effecttiveness[J]. International Journal of Adaptive Control &Signal Processing, 2013, 27(11): 925-943.
[15]Shen Q, Wang D W, Zhu S Q, et al. Finite-time faulttolerant attitude stabilization for spacecraft with actuator saturation[J]. IEEE Transactions on Aerospace & Electronic Systems, 2015, 51(3): 2390-2405.
Finite-time saturated attitude tracking control for rigid spacecraft
CHEN Hai-tao1, SONG Shen-min1, LI Xue-hui1
(Center for Control Theory and Guidance Technology, Harbin Institute of Technology, Harbin 150001, China)
This paper investigates the robust finite-time attitude tracking control problem for rigid spacecraft in the presence of the modeling uncertainty, the external disturbance and actuator saturation. Firstly, based on fast non-singular terminal sliding mode (TSM) surface, fast TSM reaching law, and auxiliary system, an basic robust finite-time saturated controller is designed that takes into account model uncertainties and external disturbances with constant upper bound. A modified auxiliary system is proposed to compensate the actuator saturation effect. Secondly, for the situation that the total disturbance of the system has polynomial upper bound, an adaptive control algorithm is used to online estimate the involved unknown parameters, and an adaptive finite-time saturated controller is designed. Lyapunov stability theory is employed to prove the finite-time stability of the proposed controllers. Simulation results show that the attitude tracking control precisions by the two controllers achieve 5×10-5and 1×10-5, respectively, verifying the effectiveness of the proposed controllers.
finite time control; actuator saturation; auxiliary system; fast nonsingular terminal sliding mode;adaptive control
1005-6734(2017)04-0536-08
10.13695/j.cnki.12-1222/o3.2017.04.020
V448.234
A
2017-04-14;
2017-07-24
国家自然科学基金(61174037,61333003,61021002)
陈海涛(1988—),男,博士研究生,研究方向为姿态控制,滑模控制和自适应控制等。E-mail: cht2016hit@163.com
联 系 人:宋申民(1968—),男,教授,博士生导师,研究方向为非线性系统的稳定性分析、鲁棒控制、导弹制导与飞行器控制。E-mail: songshenmin@hit.edu.cn
