基于一类SVM的综合导航系统信息故障检测方法
2017-11-17戴海发卞鸿巍王荣颖
戴海发,卞鸿巍,马 恒,王荣颖
(海军工程大学 导航工程系,武汉 430033)
基于一类SVM的综合导航系统信息故障检测方法
戴海发1,卞鸿巍1,马 恒1,王荣颖1
(海军工程大学 导航工程系,武汉 430033)
为了提高舰艇综合导航系统的可靠性,并考虑到系统准确建模和大量故障数据获取的困难性,提出了一种基于一类支持向量机的信息故障检测方法。该方法主要包括两个过程:第一个过程是根据实测数据,并利用一类支持向量机的分类原理和主元分析法对导航信息进行离线建模;第二个过程是结合主元分析法将该模型应用到实时的信息故障检测中。该方法不依赖于系统模型而且只需要正常的小样本数据对模型进行训练,具有简便易于实现的优点。仿真试验表明,该方法对导航系统的硬故障和软故障都具有较好的检测能力和较短的检测延迟时间,而且该方法对径向基核函数参数的变化具有较低的敏感性,避免了复杂的调参过程。
综合导航系统;可靠性;一类支持向量机;信息故障检测;主元分析法
为了提高导航的连续性、准确性和可靠性,多传感器综合导航系统被应用于各种载体。在舰艇的综合导航系统中,各个导航子系统通常采用联邦滤波的方法,以惯性导航系统为中心,按照两两组合的方式组成 Kalman子滤波器,各子滤波器的输出经过主滤波器融合得到最终的输出。但是由于舰船综合导航系统中含有多个子系统,这样就增加了综合导航系统发生故障的概率,一旦某个子系统发生了故障,经过卡尔曼滤波的信息融合和反馈后,每个子系统都可能会被污染,导致输出的导航数据不够准确,甚至完全不可用。因此为了提高舰艇综合导航系统的可靠性和安全性,故障检测和诊断是必不可少的。
常用的故障检测方法有χ2检验法[1-2]和AIME[3-4]法。但是目前的故障检测方法大多是基于模型的,而实时、准确的系统模型和量测模型以及噪声模型总是很难得到的,这就会影响故障的检测效果,导致有些故障无法检测出来或者出现误警。数据驱动技术开始出现并且得到了广泛的关注,而这些方法根据从导航子系统得到的大量测量数据直接建立故障检测方案,而不需要任何关于系统的先验知识。文献[5-6]通过小波变换的方法对导航系统的软故障进行检测,取得了一定的效果,文献[7]提出了一种基于时序模型的故障检测方法,文献[8]提出了一种基于主元分析的故障检测方法,但是前两种方法都依赖于丰富的经验知识,实现起来比较困难,而主元分析法是基于线性假设的。近年来,人工智能诊断技术的兴起为这个问题的解决提供了有利的工具,包括专家系统、神经网络和支持向量机,这些方法具有自学习和多分类的能力。文献[9]提出了一种基于神经网络的假设检验故障诊断算法,但神经网络存在收敛速度慢、结构选择不一及局部极小化等问题。
支持向量机(Support Vector Machine, SVM)是一种相对新的数据挖掘和机器学习技术,与传统的智能方法如神经网络相比,该方法具有很好的普遍性,特别适用于小样本、非线性、高维数的分类问题,并且克服了神经网络的缺点,广泛用于故障诊断等领域。文献[10]提出了一种基于C-SVM的组合导航系统故障诊断算法;文献[11]提出了一种基于最小二乘SVM的联邦滤波故障检测方法,将传统的SVM的不等式约束变为等式约束,提高了求解速度和收敛精度;文献[12]提出了一种基于支持向量回归的惯性/卫星组合导航系统故障诊断方法,实现了在组合导航中是惯导还是卫导发生故障的判别。但是上述方法同样是基于SINS误差模型的,并没有充分利用SVM方法不依赖系统模型的优点。此外,SVM模型的训练需要正常样本和故障样本,而上述文献的样本都来自仿真平台,具有一定的局限性。实际上,正常样本的取得较为容易,因为导航系统通常情况下都可以认为是正常工作的,而实际故障数据的取得却比较困难。首先,人为地使导航系统工作在故障条件的代价很高;其次,因为故障类型多种多样,也不可能得到所有故障的类型用于SVM模型的训练。
本文针对上述问题,提出了一种基于一类SVM的故障检测方法,该方法只需要正常工作的小样本数据进行模型的训练,因此文献[13]提出将该方法应用于工业生产领域的机器故障监测中,仿真结果表明该方法具有良好的故障检测性能。该方法通过在正常数据与原点之间建立一个具有最大间隔的决策边界,如果新的样本落入边界内,则被分类为正常工作点,否则将被分类为故障点。由于不需要故障数据进行训练,该SVM模型更容易训练,而且比标准SVM更适用于导航系统的故障检测。本文首先简要介绍了一类SVM的分类原理以及模型的求解方法;然后提出了基于一类SVM的导航系统信息故障检测方法和检测统计量,并且给出了阈值的求解方法和故障检测算法流程;最后基于仿真数据,通过突变故障试验、渐变故障试验以及参数敏感性试验,证明了本文提出方法的有效性。
1 一类SVM分类原理及模型求解
1.1 一类SVM分类原理
一类 SVM 是支持向量机方法中的一种,其分类的基本原理如图1所示,图中带正号的圆圈代表正类样本,带负号的圆圈代表负类样本。通过非线性映射将多维非线性关系样本组x投影到高维特征空间后,可以在特征空间中找到一个超平面将正类样本和原点(属于负类)分离开,并且保证原点与该超平面具有最大的距离d。
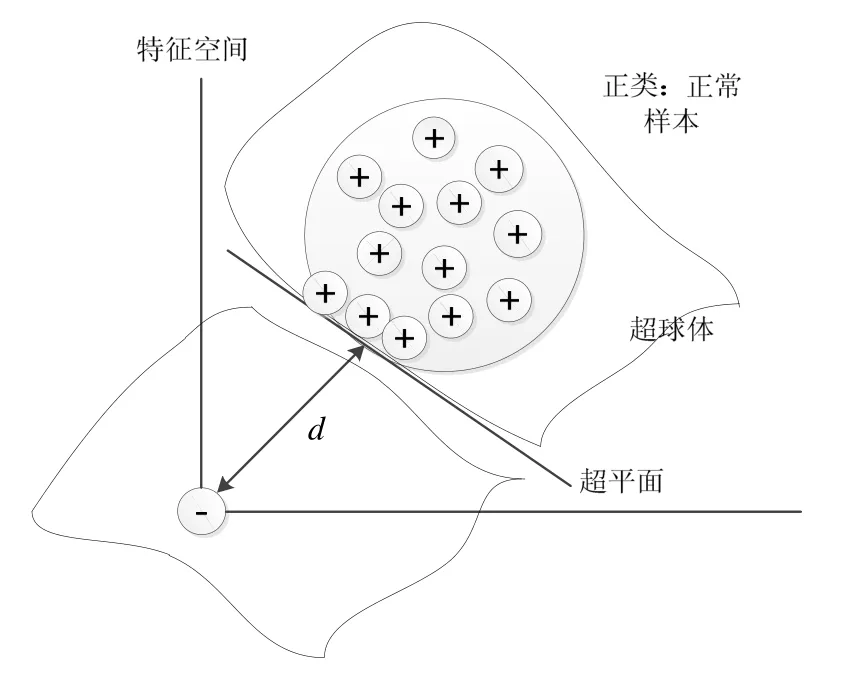
图1 一类SVM分类基本原理图Fig.1 Graphical illustration of 1-class SVM

为了使超平面对正类样本和负类样本具有最大的可分性,就必须使原点与超平面具有最大的距离即具有最小的考虑到不可能总是把所有的样本向量都与原点分离开来,即有时无法得到最优解,为了得到上述问题的次优解,可以引入一个参数和松弛变量来控制,参数v表示允许训练样本出现错误分类的最大比例分数,松弛变量iξ表示样本被错误分类的程度。因此,寻求最优超平面的问题可表示成下面的优化问题:

满足约束:

式中,N为训练样本数。
1.2 一类SVM模型求解

满足约束:


对于新的样本点x,可根据f(x)的值判断样本点所属的类别,即:如果f(x)<0,则可判断样本点属于正类,否则认为是负类。
2 基于一类SVM的故障检测
如果用正类样本表示导航系统的正常参数向量,负类样本表示故障参数向量,那么可将一类 SVM 的分类原理用于舰艇综合导航系统的故障检测。首先根据正常数据训练得到一类 SVM 模型,在得到新的导航数据后,根据式(8)对这些数据进行分类,属于正类的点认为是正常点,属于负类的点认为是异常点,从而达到实时检测系统故障的目的。
2.1 预处理
考虑到原始数据的维数较高,含有噪声,而且变量之间常常是相关的,在使用原始数据组对一类SVM模型进行训练之前需要对它们进行预处理。由于主元分析法(Principal Component Analysis, PCA)的简便性和有效性[15],本文选用该方法对数据进行预处理。主元分析法通过将原始数据投影到相对低维的子空间,得到目标向量,达到去相关性、降维和去噪的目的。一类 SVM 模型将根据这些目标向量进行训练,主元分析法的具体原理可参见文献[8]。
2.2 统计检测量与阈值
在传统的故障检测算法中,如χ2检验法和局部最小二乘法等,利用2S和Q统计量来监控系统,如果新样本的检测统计量超过阈值,则认为系统发生了故障。为了实现一类 SVM 用于故障检测,需要提出类似的检测统计量和阈值。文献[15]提出使用一类SVM模型的相反数作为检测量,即:

理想条件下,可以设置阈值为0来决定采样点是否正常。但是这样只能在参数v和径向基核函数的σ得到精确的调节后才能有保证。考虑到一类SVM参数调节的困难性,Mahadevan[15]等建议采用交叉验证的方法来设定阈值,即根据基于验证数据组得到的检测统计值和参数v来设置阈值,即将大的值作为阈值。那么设定了训练样本的最大允许分类误差和验证样本数k后,阈值就可以确定。为了避免野值的影响,阈值应该根据去除野值后的验证数据组训练得到。
2.3 故障检测算法
给定训练数据组X,用于故障检测的一类SVM离线设计程序如下:

2)基于目标矩阵T训练一类SVM模型:


3)按下式计算偏移量b:

其中:ti为松弛因子对应的支持向量,它们的个数为ns;tj表示目标向量。设定置信水平v,然后根据验证数据组计算测量检测量,按从大到小的顺序排列,假设验证数据样本大小为m,则取第v×m个测量检测量的值为阈值Jth。
当新样本x到来时,在线故障检测包括:
4)根据X的均值和方差规范化新的样本得到样本x′,并通过下式得到目标向量t:

5)计算距离检测量:

3 仿真实验及分析
通过 Matlab仿真对所提出的故障检测算法进行了评估,然后对算法的参数敏感性进行了研究并与主元分析法进行了比较。
假设舰船做机动航行,其运动轨迹如图2所示。舰船的初始位置为121.773°,纬度为31.315°,初始速度为21 m/s,方向东南;初始姿态为航向角0°,横摇角和纵摇角0°。以惯导的信息故障检测为例,假设该综导系统的惯导系统具有一个冗余度,采用的惯导精度如下:陀螺漂移分别为0.04 (°)/h、0.03 (°)/h,白噪声分别为 0.004 (°)/h、0.003 (°)/h,加速度计的常值偏置均为10-5g,白噪声均为4×10-6g。假设惯导的输出频率为1 Hz,仿真时间为24 h(前20 h系统正常工作,其中的10 h数据用于模型训练,另外10 h的数据用于交叉检验并确定阈值,最后 4 h在其中一台惯导的元器件中加入干扰信息,用于算法性能的检测)。检测向量为两台惯导信息(如速度、姿态)在采样区间的增量差,如果向量的统计检测量超过阈值,就认为该时刻的信息出现了故障,一旦检测到有信息故障,再比较两台惯导在该时刻的信息增量,较大值对应的惯导即为故障惯导。各个参数的取值采用如下经验值:径向基核函数的参数 σ=4,误警率υ=0.01。
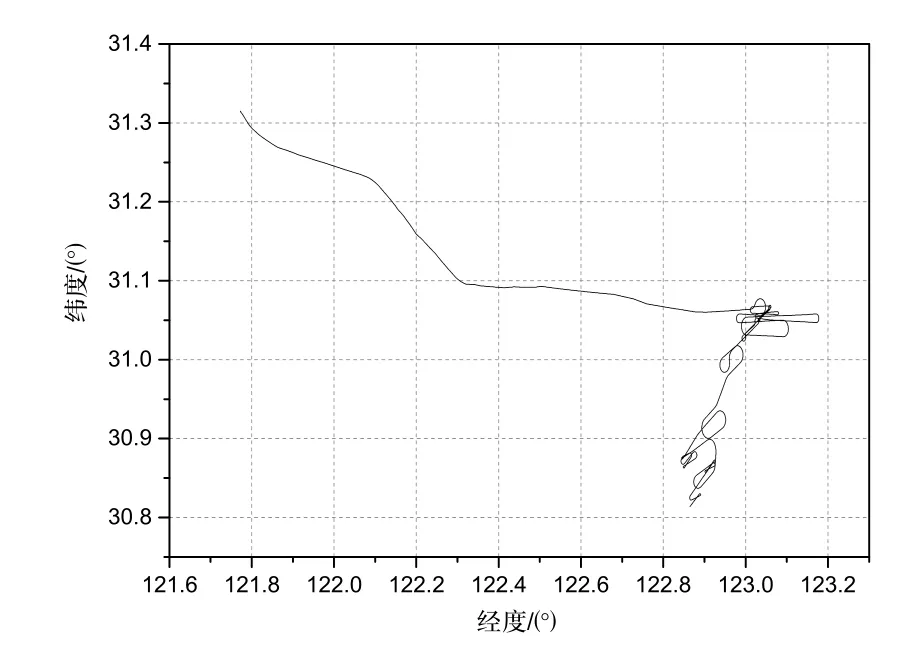
图2 舰船运动轨迹Fig.2 Trajectory of ship motion
3.1 突变故障试验
为了验证本算法对小幅值突变故障的检测能力,在测试实验的多个时刻分别对元器件加入 2倍器件标称误差的突变干扰,然后进行导航解算,并利用本文提出的算法对系统进行实时故障检测。在第51 s、101 s两个时刻对x轴陀螺加入幅值为0.08 (°)/h的突变干扰,并且在第251 s和第301 s两个时刻对x轴加速度计加入幅值为2×10-5g的突变干扰。仿真实验结果如图3所示。

图3 突变故障检测量图Fig.3 Test statistic of 1-class SVM for mutation fault
从图3中可以看出,本文所提出的方法对小突变故障具有较高的敏感性,几乎没有延迟。
为了评估算法对小突变故障的检测能力,提出故障误警率和检测率两个性能指标。对每一种故障做了40次的Monte Carlo仿真试验,统计结果如表1所示。
从表1中可以看出:故障误警率基本维持在1%左右,与置信度υ基本一致;故障检测率均达到99%以上。由上述分析可知,该方法对小突变故障具有较好的检测性能。
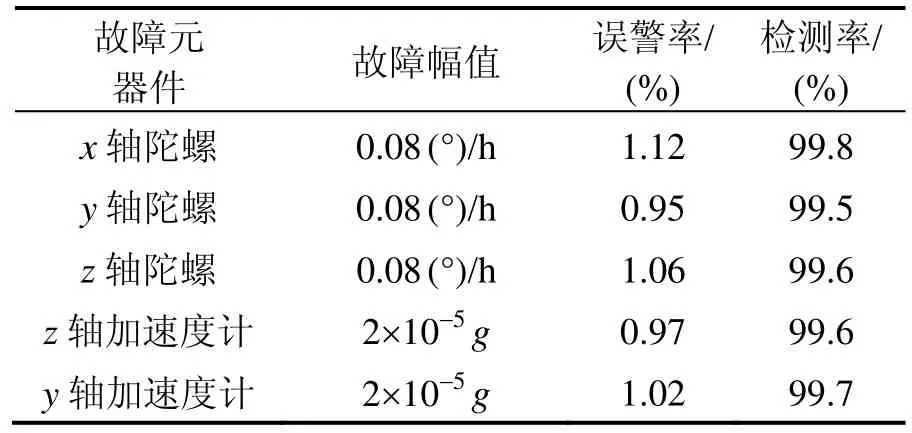
表1 各变量不同故障幅值的误警率和检测率Tab.1 False alarm rates and detection rates with different fault magnitudes
3.2 渐变故障试验
为了模拟由于温度场或者外部磁场引起的陀螺故障以及由于加速度计传感器激励特性的异常变化引起的加速度计零偏变化,在检测试验的多个时间段分别对元器件加入不同幅值的斜坡干扰信号,试验结果如图4所示。从图4中可以看出,该方法能够较好地检测出元器件中的渐变故障,而且只存在较小的延迟时间。
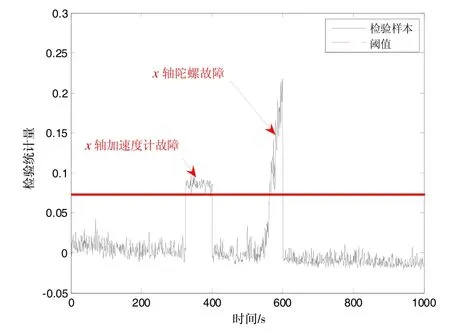
图4 渐变故障检测量图Fig.4 Test statistic of 1-class SVM for gradual fault
表2给出了算法对不同元器件缓变故障的检测延迟时间和故障检测率。

表2 各变量不同故障变化率的检测延迟时间和检测率Tab.2 Fault detection latencies and fault detection rates with different fault changing rates
从表2中可以看出,该算法对各元器件中添加的较小故障速率的故障具有较好的敏感性,且对于加速度计的故障检测性能要略优于对陀螺故障的检测。此外,两者都存在一定的检测延迟和漏检率,但总体的检测性能较好。
3.3 对参数的敏感性
为了研究基于一类 SVM 的故障检测算法对参数的敏感性,选取了基于PCA贡献率的故障检测算法进行对比分析。基于一类 SVM 模型中的主要参数为核参数,本文中即为径向基函数的宽度σ,基于 PCA贡献率的算法的主要参数是选取的主元数量。本试验中,径向基函数的宽度以对数尺度变化取值,主元数量从2到7以1为步长取值。 对7个变量以渐变故障为例,分别运用基于PCA贡献率的算法和基于一类 SVM 的算法进行对比分析。分别遍历相关参数的整个取值范围,计算故障检测率和延迟的标准差,得到它们的标准差柱状图如图5和图6所示。

图5 对参数的敏感性比较:故障检测率的标准差柱状图Fig.5 Sensitivities to parameters: bar plot of standard deviation of fault detection rates

图6 对参数的敏感性比较:故障延迟的标准差柱状图Fig.6 Sensitivities to parameters: bar plot of standard deviation of fault detection latencies
从图5和6可以看出,基于一类SVM故障检测方法的检测性能指标方差远远小于基于 PCA贡献率的算法的性能指标方差。基于PCA贡献率的算法,其性能指标的高标准差反映了该方法的性能对主元数量很敏感。另一方面,基于一类 SVM 的算法对径向基核函数的参数变化并不敏感。
4 结 论
本文针对舰艇综合导航系统输出的参数,提出了一种基于一类 SVM 的故障检测方法,并且具体阐述了检测阈值的求解方法和故障检测算法流程,并通过仿真试验验证了本文所提出的算法对导航系统的突变故障和渐变性故障具有较好的检测能力,而且该方法对径向基核函数的参数变化具有较低的敏感性,避免了复杂的调参过程,具有简便性和较好的适用性。
(References):
[1]Joerger M, Pervan B. Kalman filter-based integrity monitoring against sensor faults[J]. Journal of Guidance Control & Dynamics, 2013, 36(2): 349-361.
[2]Wang R, Xiong Z, Liu J Y, et al. Chi-square and SPRT combined fault detection for multisensor navigation[J].IEEE Transactions on Aerospace and Electronic Systems,2016, 52(3): 1352-1365。
[3]Joerger M, Pervan B. Fault detection and exclusion using solution separation and chi-squared ARAIM[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016,52(2): 726-742.
[4]Rakipi A, Kamo B, Cakaj S, et al. Integrity monitoring in navigation systems: fault detection and exclusion RAIM algorithm implementation[J]. Journal of Computer &Communications, 2015, 3(6): 25-33.
[5]程建华, 李明月. 基于小波分析的容错组合导航系统故障检测算法研究[J]. 宇航学报, 2012, 33(4): 419-425.Cheng Jian-hua, Li Ming-yue. Research of fault detection algorithm based on wavelet analysis in integrated navigation system[J]. Journal of Astronautics 2012, 33(4): 419-425.
[6]Ding D F, Zhao X M. Navigation system failure detection based on FM gauss wavelet transforms[J]. Applied Mechanics & Materials, 2014, 602-605: 1874-1878.
[7]Pham H T, Yang B S. Estimation and forecasting of machine health condition using ARMA/GARCH model[J]. Mechanical Systems and Signal Processing, 2010,24(2): 546-558.
[8]F. Zhou, H. P. Ju, Y. Liu. Differential feature based hierarchical PCA fault detection method for dynamic fault[J]. Neurocomputing, 2016, 202: 27-35.
[9]张华强, 赵剡, 连远峰. 基于自适应概率神经网络的SINS/GPS组合导航系统故障诊断方法[J]. 中国惯性技术学报, 2012, 20(6): 749-753.Zhang Hua-qiang, Zhao Yan, Lian Yuan-feng. Adaptive probabilistic neural network fault-diagnosis algorithm for SINS/GPS integrated navigation system[J]. Journal of Chinese Inertial Technology, 2012, 20(6): 749-753.
[10]张涛, 徐晓苏. 基于C-SVM的组合导航系统故障诊断算法[J]. 中国惯性技术学报, 2011, 19(2): 239-242.Zhang Tao, Xu Xiao-su. Fault diagnosis based on integrated navigation system using C-SVM technology[J].Journal of Chinese Inertial Technology, 2011, 19(2):239-242.
[11]高运广, 王仕成, 刘志国等. 一种基于LS-SVM的联邦滤波故障检测方法[J]. 控制与决策, 2011, 26(9):1433-1435.Gao Yun-guang, Wang Shi-cheng, Liu Zhi-guo. Fault detection method based on LS-SVM for federated Kalman filter[J]. Control and Decision, 2011, 26(9): 1453-1455.
[12]柳敏, 赖际舟, 刘建业, 等. 基于 SVR 的惯性/卫星组合导航系统故障诊断方法[J]. 控制与决策, 2016,31(10): 1-5.Liu Min, Lai Ji-zhou, Liu Jian-ye, et al. Fault diagnosis method of integrated GPS/Inertial navigation system based on support vector regression[J]. Control and Decision, 2016, 31(10): 1-5.
[13]Cai L, Tian X, Zhang H. Process fault detection method based on time structure independent component analysis and one-class support vector machine[J]. IFAC-Papers-OnLine, 2015, 48(21): 1198-1203.
[14]Mahadevan S, Shah S L.Fault detection and diagnosis in process data using one-class support vector machines[J].Journal of Process Control, 2009, 19(10): 1627-1639.
[15]Duan L, Xie M, Bai T, et al. A new support vector data description method for machinery fault diagnosis with unbalanced datasets[J]. Expert Systems with Applications,2016, 64: 239-246.
Information fault detection for integrated navigation systems using one-class support vector machine
DAI Hai-fa1, BIAN Hong-wei1, MA Heng1, WANG Rong-yin1
(Department of Navigation Engineering, Naval Univ. of Engineering, Wuhan 430033, China)
Aiming to improve the reliability of the integrated navigation system and consider the difficulty in acquiring the accurate system model and large amount of fault data, an information fault detection method based on one-class support vector machine (SVM) is presented. The method mainly included two processes:1) the measured data are used to build the model for navigation system by using one-class SVM and Principal Component Analysis; 2) the model is applied in the real-time information failure detection by combining with Principal Component Analysis. The new method does not rely on the system model and only requires the normal and small sample to train the model, which is simple and convenient for fault detection. The results of the experiment based on the measured data show that the proposed method has good detection performance and short detection delay time for both step fault and gradual fault, and is not sensitive to the changes of the radial basis function kernel parameter, which avoids the complicated parameter tuning.
integrated navigation system; reliability; one-class support vector machine; information fault detection; principal component analysis
1005-6734(2017)04-0555-06
10.13695/j.cnki.12-1222/o3.2017.04.023
2017-03-17;
2017-07-20
国家自然科学基金(41506220);湖北省自然科学基金(2015CFC866)
戴海发(1990—),男,博士生,从事组合导航技术研究。E-mail: daihaifa1990@163.com
联 系 人:卞鸿巍(1972—),男,教授,博士生导师。E-mail: travibian@foxmail.com
A
