分布式协同作战一致性建模
2017-11-17刘付显范成礼
王 伟,刘付显,范成礼
(空军工程大学防空反导学院,西安 710051)
分布式协同作战一致性建模
王 伟,刘付显,范成礼
(空军工程大学防空反导学院,西安 710051)
分布式作战中,各作战力量之间的协同一致是有效发挥体系作战效能的重要条件,但是由于缺少集中统一的指挥控制,达成协同一致更加困难。针对自主协同和主从协同两种模式,分别建立基于通信网络拓扑的有向图模型,设计各作战单元之间的交互协议以达成协同一致,给出协同一致性协议收敛的相关定理,并进行证明。最后,通过仿真实验验证了方法的可行性和有效性。
分布式作战,协同作战,一致性理论,网络拓扑
0 引言
现代战争是体系与体系的对抗,作战模式逐渐由以平台为中心的单一资源作战向以网络为中心的体系作战模式转变,这对作战体系中各组织之间的有效协同提出了更高的要求。“协同”是指各种作战力量共同遂行作战任务时,按照统一计划在行动上进行的协调配合,确保各种作战力量协调一致地行动。可以说,一致性或同步性是协同最重要的属性,各作战力量只有达成决策和行动上的同步一致,才能更好地实现协同目标。这种一致性的达成来自两种途径:一是在集中式指挥中,由指挥员通过对所属作战力量的统一指挥控制来实现同步一致;二是在分布式作战中,各作战单元间为达成共同的作战使命与目标而在作战行动上的自主协同与自主配合,从而达到快速有效的整体“涌现”[1],而自同步正是体系作战协同的最高境界[2]。但是在分布式作战中由于缺少集中统一的指挥控制,达成协同一致变得更加困难。随着信息时代体系作战对指挥速度和灵活性的要求越来越高,分布式作战协同必将发挥更大作用。深入研究协同一致性问题对促进体系作战效能的发挥具有重要意义。
近年来,多智能体的协作和协同控制问题得到广泛关注,对一致性理论的研究不断深入[3-6],一致性算法已经在多航天器编队控制[7]、传感器网络[8]等领域得到了广泛应用。本文应用一致性理论,对作战协同一致性问题进行研究。一方面,建立完全自主协同模式下的一致性模型,并研究分组协同一致问题;另一方面,建立存在基准状态的主从协同模式的一致性模型。给出两种协同模式的一致性协议,并探究达成协同一致性的条件。
1 自主协同一致性模型
1.1 自主协同一致性的数学描述
多作战单元自主协同一致性,是指作战网络中的多个作战单元在没有上级统一指挥控制的情况下,围绕共同的作战任务,通过与近邻之间信息共享与交互,不断获知其他作战单元的状态(包括物理域、认知域等),并根据某种协议(或算法)不断调整自身状态,最终达成状态一致,实现自同步。
定义1 为达成协同一致性,各作战单元需要向邻居单元获取或输出的最少状态变量,称为协同变量。
因此,作战协同一致性可描述为:

定义2 各作战单元之间状态差值量的代数和,称为协同偏离度,记为

1.2 协同模型建立
对于由多个作战单元组成的协同作战网络,可以采用有向图对作战网络的通信拓扑结构进行建模。将参与协同作战的N个作战单元视为作战网络的N个节点,节点之间由通信链路形成耦合关系,通信拓扑可由有向图表示,其中,表示节点集,表示边集。节点i至节点j的有向边记为表示作战单元j可以从作战单元i获得信息(i向j传输信息,或者j利用自身传感器探测到i的信息)。节点i的邻居集可用表示。令矩阵为图GN的加权邻接矩阵,当时,,否则。再令矩阵为图GN的拉普拉斯(Laplacian)矩阵否则。(GN,x)表示状态为 x,拓扑结构为G的协同作战网络,其中为N个作战单元的状态。
作战单元的状态既可以指真实的物理状态(如位置、速度等),也可以指虚拟的决策信息状态(如发动攻击的时刻、攻击位置等)。各作战单元根据预先规定的协同一致性协议不断调整自身状态,从而达成整个作战网络节点的状态一致。采用单积分动力系统描述作战单元状态调整过程:


由式(3)可知,每个作战单元的状态会被牵引到其邻居节点的状态,当其与邻居节点状态相同时控制输入量变为0,最终达成状态一致。式(2)和式(3)可写成如下矩阵形式:

式中,⊗表示Kronecker积。
协同作战过程中,多作战单元达成状态一致的速度是影响协同效能的重要因素。为了提高一致性的收敛速度,将作战单元的过去时刻状态引入一致性协议,在式(3)的基础上加入作战单元当前时刻状态与过去时刻状态的差值[9]

1.3 模型求解分析
作战网络在协同一致性协议控制下实现状态一致是有条件的,下面给出一致性收敛的相关定理。
定理1 由N个作战单元组成的协同作战网络(GN,x),采用式(3)渐进达到一致,当且仅当有向图GN含有一簇有向生成树。
定理1的证明见文献[3]。
定理2 由N个作战单元组成的协同作战网络(GN,x),有向图 GN含有一簇有向生成树,对式(5),如果,那么作战网络能够渐进达到状态一致,其中ωx满足方程为矩阵LN的特征值。
定理2的证明见文献[9]。
1.4 自主协同分组一致性模型
有时为了满足作战任务需求、适应战场环境等因素,各作战单元的最终状态不是收敛于同一值,而是需要满足特定的差值关系,从而达成作战单元之间的相互配合,实现体系的最大效能。对于包含N个作战单元的网络,划分为k个组,为了使各组的状态差收敛于预定的期望值,设计如下控制协议:

定理3 由N个作战单元组成的协同作战网络(GN,x),采用式(6)实现,当且仅当有向图GN含有一簇有向生成树。
可得

由式(7)可知,作战网络(GN,x)实现状态差值已知的分组一致等价于实现状态一致。式(6)可变换为

定理3证毕。
同理,为了提高式(6)的收敛速度,引入作战单元的状态差值

定理4 由N个作战单元组成的协同作战网络(GN,x),有向图 GN含有一簇有向生成树,对式(9),如果,那么多作战网络能够渐进达到分组一致,其中ωx满足方程为矩阵LN的特征值。
证明 式(9)可变换为

采用类似定理2的证明方法可得证。
2 主从协同一致性模型
2.1 主从协同一致性的数学描述
自主协同的一致性协议能够使各作战单元的状态达成一致,但这个一致性状态是由作战网络的通信拓扑、连边权值和节点初值决定的,不能收敛于某个事先指定的状态值,因此,不能保证得到的一致性状态是最佳状态。在实际协同作战过程中,作战网络存在一个较好的期望状态,在此状态下能够更好地发挥体系作战效能,例如最佳的协同攻击时刻、最佳协同集结位置等,这就要求各作战单元的状态能够收敛于期望值。这个期望值可以由作战网络中作战能力较强的某个作战单元或拥有更准确战场信息的作战单元指定,此作战单元充当领导“主体”,其他作战单元以主导节点指定的状态为基准,充当跟随“从体”。
主从协同一致性是指作战网络中的作战单元以“主体”的状态为基准,通过信息共享与交互,并根据某种协议(或算法)不断调整自身状态,最终收敛于“主体”状态。作战网络主从协同一致性可描述为:

2.2 协同模型建立
主从协同一致性区别于自主协同一致性,主要体现在作战网络的最终状态是由领导“主体”决定,而不是由作战网络中全部的作战单元共同决定。根据主从模式下作战单元对协同终态产生影响不同的特点,将作战网络的节点划分为3类:一是“领导者”,即作战网络中起主导地位的作战单元,领导者的状态不受其他节点状态的影响;二是“次级领导者”,包括可直接接收“领导者”信息的作战单元,次级领导者无需考虑与其相邻的其他非领导者的影响,其状态调整仅受“领导者”的影响;三是“完全跟随者”,包括无法直接接收“领导者”信息的作战单元,其状态调整受其邻居节点的影响。对作战网络节点进行分类,不同类别节点采用不同的协同协议,特别是“次级领导者”的引入能够使作战网络提高收敛速度,并且减少信息处理负载。
根据网络节点之间的通信链接关系,建立主从协同作战网络的有向图表示节点集,表示边集。节点集表示“领导者”,节点集表示“次级领导者”的集合,节点集表示“完全跟随者”的集合。令矩阵为GN+1的加权邻接矩阵,矩阵为GN+1的拉普拉斯矩阵。
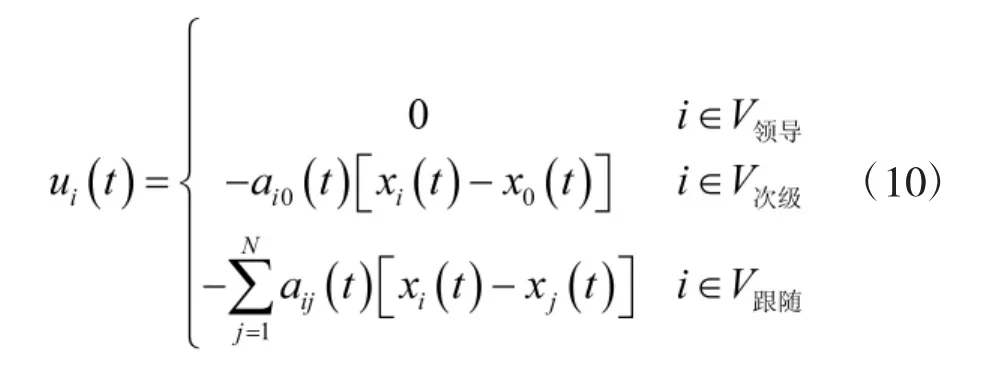
根据3类节点的状态调整策略,作战网络的协同一致性协议可设计为:
2.3 模型求解分析
由式(10)可知,“次级领导者”仅根据“领导者”调整自身状态,而不考虑其他邻居节点的状态,因此,可对作战网络的原始通信拓扑图进行简化变换:
Step1:对图GN+1进行减边操作,减去指向“次级领导者”的所有连边(其中“领导者”指向“次级领导者”的连边予以保留),即减去的边集为
定理5 存在基准状态的协同作战网络(GN+1,x),采用式(10)渐进达到一致,当且仅当其等效通信拓扑图含有一簇有向生成树。
证明 实质上,对作战网络(GN+1,x)采用式(10)等效于对采用式(3)。进而由定理 1可知,渐进达到一致,当且仅当含有一簇有向生成树。
定理5证毕。
3 仿真分析
为验证前文提出的协同一致性协议的有效性,下面针对不同协同作战模式给出仿真算例。
算例1 某防空作战行动中,由4个地空导弹营组成防空联盟,在无上级统一指挥的情况下,4个作战单元采用自主协同的方式进行防空作战,为对敌方某来袭目标实施最大程度的拦截,采用集火射击策略,并就拦截时刻进行协同。受通信距离和通信隐蔽性的限制,4个作战单元组成的作战网络通信拓扑和连接权值如图1所示。
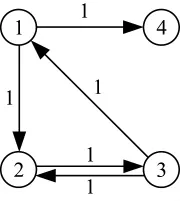
图1 防空联盟通信拓扑
防空联盟作战过程中通过通信网络交互决策信息(射击时刻),并采用协同一致性协议就射击时刻达成一致。假定4个作战单元给出的决策信息状态(射击时刻)的初值为 x(0)=[11,13,15,17]T,允许协同误差ε=0.05。
采用式(3)时射击时刻的一致性演化过程如图2所示。

图2 式(3)一致性收敛过程
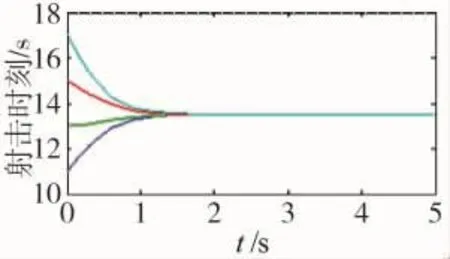
图3 式(5)一致性收敛过程
对比图2和图3可知,式(5)中过去时刻状态的引入能够加快防空联盟就射击时刻达成一致,最终得出集火射击时刻为13.52 s。
算例2 4架无人机执行协同对地攻击任务,为达成最佳攻击效果,1号机和4号机首先同时对敌方地面防空武器实施打击压制,2号机和3号机在8 s后同时迅速实施火力突击。4架无人机需要对各自攻击时刻进行协同,从而实现打击行动的有效配合。4架无人机的通信拓扑和连接权值同算例1的图1。
假定4架无人机给出的决策信息状态(攻击时刻)的初值为 x(0)=[1,6,15,7]T,允许协同误差ε=0.05。将1号和4号机设定为组1,2号和3号机设定为组2,两组之间的状态期望差值Δ12=-8。
采用式(6)时攻击时刻的一致性演化过程如图4所示。

图4 式(6)一致性收敛过程
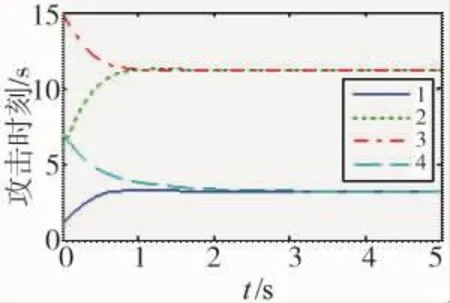
图5 式(9)一致性收敛过程
对比图4和图5可知,式(9)中过去时刻状态的引入能够加快无人机就攻击时刻达成分组一致,分组1的攻击时刻为3.25 s,分组2的攻击时刻为11.25 s。
算例3 某战场区域D(N,E)内,5架无人机执行协同对地攻击任务,假定其中0号机首先发现目标,其他4架无人机向0号机集结,0号机盘旋等待,集结后向目标发起攻击。在协同集结过程中,以0号机的位置状态为基准状态,其他无人机向基准状态集结。受无人机通信距离和通信隐蔽性的限制,5架无人机的通信拓扑如图6所示。
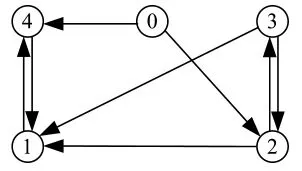
图6 无人机通信拓扑
对主从协同模式的作战网络进行等效变换,0号机为“领导者”,2号和4号机为“次级领导者”,1号和3号机为“完全跟随者”,如图7所示。
假定5架无人机的初始位置分别为x0(0)=(4,6),x1(0)=(9,6),x2(0)=(5,2),x3(0)=(8,3),x4(0)=(7,9),允许协同误差 ε=0.01。采用式(10)的集结位置一致性演化过程如图8所示。

图7 通信拓扑等效图

图8 式(10)一致性收敛过程
由图8可知,约60 s后作战单元收敛到基准状态,完成集结过程。集结过程中,4架无人机的航迹如图9所示。

图9 式(10)无人机协同航迹
算法对比分析:目前对于领导跟随一致性问题,一般采用的一致性算法为[5]:

从式(11)可看出,其没有对网络的节点进行分类,非领导节点不加选择地接收其所有邻居节点的信息,这样不仅增加了信息处理量,更重要的是减小了网络收敛的速度。采用式(11)的集结位置一致性演化过程如图10所示,4架无人机的航迹如图11所示。

图10 式(11)协同一致性过程
对比图8和图10可知,本文提出的式(10)具有更快的收敛速度。对比图9和图11可知,式(10)具有更短的航行路程。

图11 协议式(11)无人机协同航迹
4 结论
本文应用一致性理论,对分布式作战中的协同一致性问题进行了研究。针对自主协同模式,建立作战网络通信拓扑的有向图模型,给出了协同一致性协议,并分析了协同一致性收敛的条件,在此基础上研究了分组协同一致性问题。针对主从协同模式,根据作战网络节点之间关系的不同,将节点分为“领导者”、“次级领导者”和“完全跟随者”3类,建立通信拓扑有向图及其等效图,提出了协同一致性协议,并给出协议收敛性的相关定理及其证明。通过设计协同作战案例,仿真验证了方法的可行性和有效性。
[1]阳东升,强军,黄广连,等.信息时代作战体系的概念模型及其描述[J].军事运筹与系统工程,2009,23(1):3-8.
[2]胡晓峰,贺筱媛,饶德虎.基于复杂网络的体系作战协同能力分析方法研究[J].复杂系统与复杂性科学,2015,12(2):9-17.
[3]REN W,BEARD R W.Consensus seeking in multiagent systems under dynamically changing interaction topologies[J].IEEE Transactions on Automatic Control,2005,50(5):655-661.
[4]LIU Y,MIN H B,WANG S C,et al.Distributed adaptive consensus for multiple mechanical systems with switching topologies and time-varying delay [J].Systems&Control Letters,2014,64(1):119-126.
[5]PARK M J,KWON O M,PARK J H,et al.Randomly changing leader-following consensus control for Markovian switching multi-agent systems with interval time-varying delays[J].Nonlinear Analysis:Hybrid Systems,2014,12(1):117-131.
[6]谢媛艳,王毅,马忠军.领导-跟随多智能体系统的滞后一致性[J].物理学报,2014,63(4),040202.
[7]张海博,胡庆雷,马广富.多航天器系统分布式有限时间姿态协同跟踪控制 [J].控制与决策,2014,29(9):1593-1598.
[8]王长城,戚国庆,李银伢.传感器网络一致性分布式滤波算法[J].控制理论与应用,2012,29(12):1645-1650.
[9]FENG X L,HUANG T Z,SHAO J L.Several consensus protocols with memory of multi-agent systems[J].Mathematical and Computer Modelling,2013,58(9):1625-1633.
Modeling of Consensus on Distributed Cooperative Combat
WANG Wei,LIU Fu-xian,FAN Cheng-li
(School of Air and Missile Defense,Air Force Engineering University,Xi’an 710051,China)
Consensus between multiple combat units is an important requirement for SoS to release combat ability effectively in distributed combat.However,the lack of centralized command and control makes it harder to achieve consensus.Directed graphs models are established respectively based on communication networks topology for self-contained cooperation and leader-following cooperation.The interaction protocols are designed to achieve consensus between multiple combat units.Theorems about convergence of the interaction protocols are introduced with proof.At last,examples are provided to demonstrate the feasibility and effectiveness of the proposed method.
distributed combat,cooperative combat,consensus theory,networks topology
1002-0640(2017)10-0118-06
E917;TP13
A
10.3969/j.issn.1002-0640.2017.10.025
2016-08-15
2016-10-17
王 伟(1988- ),男,山东日照人,博士研究生。研究方向:作战指挥决策分析。