基于极限学习机的空间配准方法*
2017-11-17常超伟赵秋月于红娟申良强
常超伟,赵秋月,于红娟,申良强,董 浩
(北方自动控制技术研究所,太原 030006)
基于极限学习机的空间配准方法*
常超伟,赵秋月,于红娟,申良强,董 浩
(北方自动控制技术研究所,太原 030006)
对极限学习机的特点及适用条件进行了探讨,在此基础上提出和实现了一种基于极限学习机的空间配准方法,并与基于广义最小二乘和神经网络的配准方法在多种场景下进行了仿真比较,结果验证了基于极限学习机的空间配准方法的性能优势。
空间配准,系统误差,非参数估计,极限学习机
0 引言
现代战场空情复杂性对防空预警系统提出了严峻的挑战,可以从两条途径加以解决:一方面,加快研制各种新体制雷达,进一步提升探测能力;另一方面,发展雷达组网系统,融合各种探测器的信息,提高探测系统的正确性、准确性、连续性、灵活性和生存能力,从而提高系统的体系作战能力。然而,当多部雷达进行数据融合时,各雷达系统误差的存在可能导致航迹的分裂和误相关,使融合航迹的精度变差,不能最佳地达到雷达组网的目的。因此,在对雷达的量测数据进行处理时需要对其进行空间配准,就是借助于多部雷达对空间共同目标的量测对雷达的偏差进行估计和补偿。空间配准问题在多雷达组网系统中有着非常重要的意义。
当前关于多传感器空间配准方法的研究多是基于参数估计的空间配准方法(独立估计、联合估计和EX估计等方法),但基于参数估计的方法只适用于一类误差源或者两类误差源存在的情况,当多类误差源存在时(如在动平台背景下的传感器量测误差、平台位置误差、平台姿态误差和坐标转换误差)的配准精度很低甚至产生错误的配准结果。
和参数估计方法相对应的是非参数估计方法,包括神经网络和支持向量机方法等,非参数估计方法是一种不需要预先知道待估计参数种类的方法,因此,在待估计参数模型未知等方面有着参数估计无法达到的效果。神经网络学习理论通常是非线性函数逼近,它是一种基于样本数量趋于无穷大的渐近理论。随着样本的增加,其训练时间就越长,实时性降低。极限学习机理论是在单隐层神经网络基础上提出的一种高效的学习方法,学习速度快。鉴于此,我们将极限学习机方法应用到空间配准问题中,提出了一种基于极限学习机的空间配准方法,同时将该方法在改变多种待估计参数种类的场景下进行了测试,比较了该方法的性能,验证了基于非参数估计的空间配准方法在解决系统误差种类未知情况下的空间配准问题的优越性。
1 ELM空间配准模型
1.1 极限学习机原理
极限学习机(Extreme Learning Machine,ELM)作为神经网络的一个重要分支,在机器学习、模式识别等领域起着重要的作用。不同于传统的神经网络方法,极限学习机最大的特点就是所有隐层参数均为随机产生,而不需要繁琐的迭代过程。因此,相对于传统的学习方法,极限学习机具有参数选择容易,学习速度快等优点。

式中,aj是第j个隐节点的输入权值;bj是第 j个隐节点的偏差;βj是第j个隐节点的输出权值;是第j个隐节点的输出函数;是隐层关于xi的输出向量,h(xi)的作用是将样本xi由d维输入空间映射到L维的特征空间。
输入层有n个神经元,隐藏层有1个神经元,输出层有m个神经元,对应m个输出变量。输入层到隐藏层的权值矩阵用表示,其中wji表示第i个神经元与隐藏层第j个神经元间的连接权值。
假设具有Q个样本的训练集输入矩阵X和输出矩阵Y分别为:



其中,为统一趋势后,第i个指标的第j号试验的指标值;yij为第i个指标第j号试验的观察值;为第i个指标的稳定值。其次,计算每组试验综合评分:考虑到3因素对衡量指标的重要程度,以10分作为总“权”,粒距合格率为0.7分,重播率为0.5分,漏播率为2.5分。每组试验综合评分指标为:每号试验的综合加权评分值可由式(2)计算得出,计算结果如表2所示。则

式中,T′为矩阵T的转置;H成为隐藏层输出矩阵,形式为:

输入层与隐藏层间的连接权值W和隐藏层神经元的阈值b在训练前随机选取,且在训练过程中保持不变。利用H的广义逆矩阵H+求得

所以,建立ELM的建模步骤如下:
①随机产生ELM的输入连接权值w和隐层神经元的阈值b;②计算隐层输出矩阵H;③通过输出矩阵的广义逆矩阵H+求得输出连接权值β;④计算ELM的输出值。
1.2 ELM配准模型步骤
极限学习机的学习过程分为两个阶段:训练阶段和工作阶段。输入是第1个传感器的量测,经过训练和作为目标值的第2个传感器相匹配。在完成训练后,网络将可从作为输入的第1个传感器中接收到一个有偏的量测,计算得到偏差补偿后的量测作为输出。

在实际工程应用中,训练阶段和工作阶段可以同时进行,即对于每一个新的样本,先将其加入到训练集中进行训练,然后代入训练好的回归函数中计算新的输出,从而能够对传感器量测进行实时在线的相对配准。当训练过程结束后,根据调整后的权值,对于新的输入计算得到的输出则传感器1配准后的量测为
2 仿真实现与比较
2.1 仿真场景设置
在MATLAB7.0环境下进行了编程实现。并设置了5种仿真场景,分别在各种场景下与传统的GLS方法和神经网络方法进行了仿真比较。场景中的各参数如下:
传感器1位于公共坐标系原点(0 0 0),传感器2位于距传感器1的1 500 m处(-1 500 0 0),目标的飞行起点为(-3 000-2 000 100),目标速度为(200 30 20)。
场景中涉及的偏差大小为:
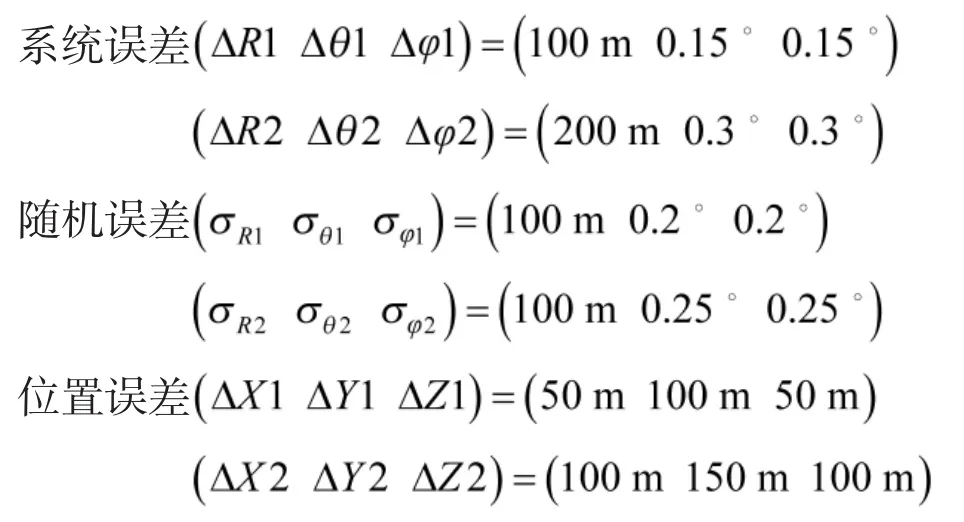

各场景中包含的误差种类有:
2.2 极限学习机、神经网络与GLS等配准方法的仿真比较

图1 各种方法配准前后的距离轨迹

图2 各种方法配准前后的方位角轨迹

图3 各种方法配准前后的俯仰角轨迹
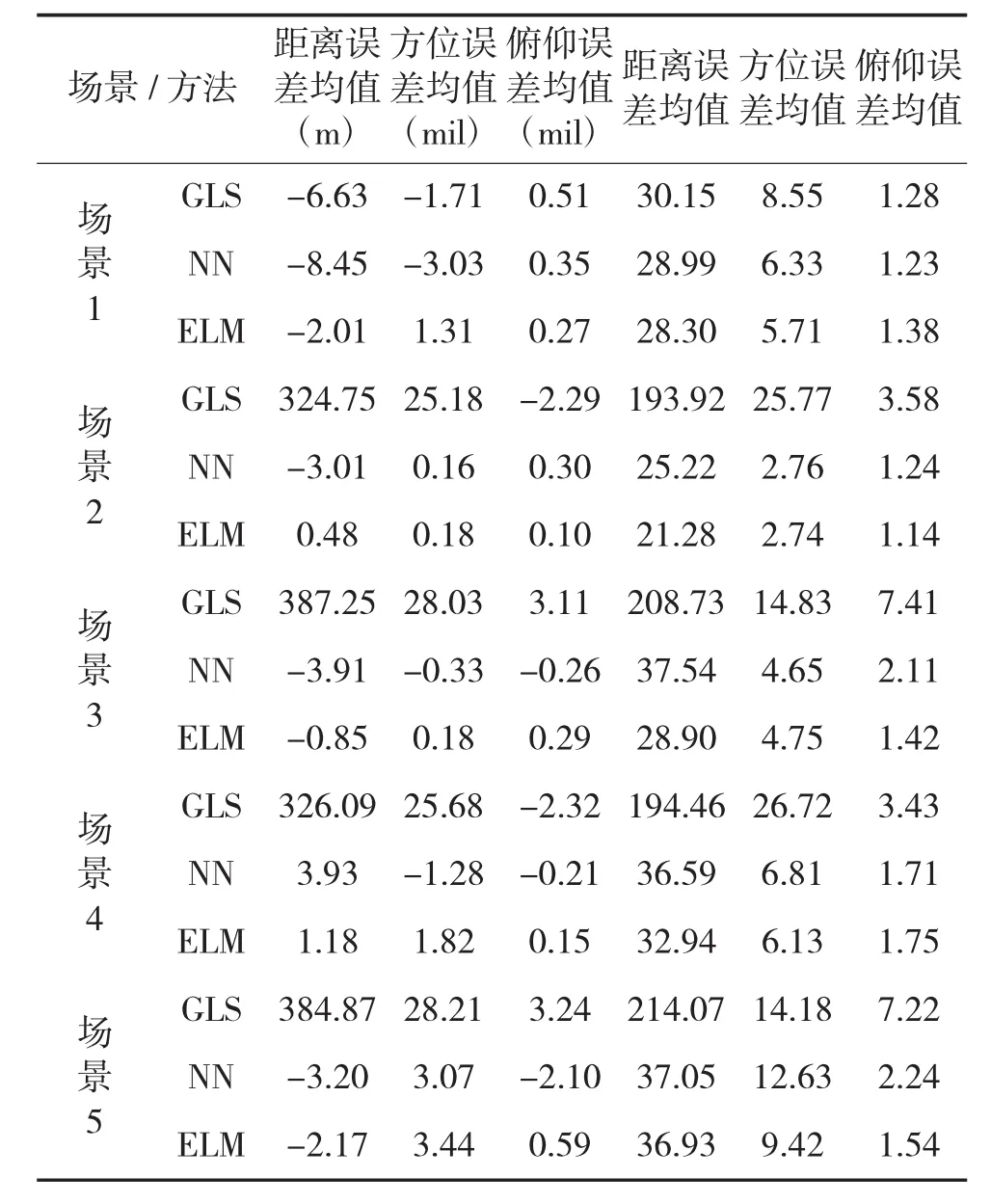
表1 各种场景下ELM、NN与GLS方法的性能比较
从表1中可以看出,只有在第1种仿真场景,即模型参数已知的情况下,GLS的估计精度高于NN,其他4种场景中GLS的估计精度都低于NN方法。但是在5种仿真场景下ELM方法的估计精度均高于GLS和NN方法,验证了ELM方法在处理系统误差种类未知情况下的空间配准问题上的性能优势。
3 结论
本文对基于极限学习机的空间配准方法进行了一些探讨,它是一种不需要预先知道待估计参数种类的方法,因此,在待估计参数模型未知等方面使用非参数估计方法将会产生参数估计无法达到的效果。利用极限学习机的优势,将该方法应用到相对空间配准问题中,并通过与其他方法的仿真比较验证了基于极限学习机的空间配准问题的优越性。由于极限学习机方法的训练时间短,实时性高,所以基于极限学习机的空间配准方法能够实时在线进行空间配准。至于如何利用极限学习机方法解决绝对空间配准问题,值得进一步进行深入研究。
[1]HAIM K,HAVA T S.Sensor registration using neural networks[J].IEEE Transactions on Aerospace and Electronic Syatems,2000,36(1):85-101.
[2]王晓丽.一种混合结构的数据融合算法研究及在目标识别中的应用[D].秦皇岛:燕山大学,2004:43-57.
[3]王礼云,毛文涛,胡武鹏.极限学习机多目标模型[J].计算机仿真,2014,31(8):386-391.
[4]张文博,姬红兵.融合极限学习机[J].电子与信息学报,2013,35(11):2728-2732.
[5]高效,田科钰,钟恢扶.多雷达数据配准的工程实现[J].现代雷达,2004,26(3):33-35.
Approach for Space Registration Based on Extreme Learning Machines
CHANG Chao-wei,ZHAO Qiu-yue,YU Hong-juan,SHEN Liang-qiang,DONG Hao
(North Automatic Control Technology Institute,Taiyuan 030006,China)
The characteristic and applicability of extreme learning machine have been studied in this paper,a method of space registration based on extreme learning machine is proposed,it is compared with the method of sensor registration based on neural network and the method of GLS in multi-kind parameters.The result illustrate that the method of space registration based on extreme learning machine is effective.
space registration,systematic error,nonparametric estimation,extreme learning machine
1002-0640(2017)10-0010-04
TP391
A
10.3969/j.issn.1002-0640.2017.10.003
2016-08-15
2016-10-19
国家自然科学基金资助项目(61371064)
常超伟(1984- ),男,河北望都人,工程师。研究方向:空间配准和目标综合识别。