基于MAS的航空集群体系结构探究*
2017-11-17朱创创梁晓龙张佳强刘苹妮
朱创创,梁晓龙,张佳强,刘苹妮
(空军工程大学空管领航学院,西安 710051)
基于MAS的航空集群体系结构探究*
朱创创,梁晓龙,张佳强,刘苹妮
(空军工程大学空管领航学院,西安 710051)
以多智能体理论为基础,对航空集群体系结构进行了探究。采用传统的自顶向下与基于涌现的自底向上相结合的方法,将集群系统划分为三层:系统层、任务层、自组织层;设计了三类智能体:任务决策智能体、任务管理智能体、任务执行智能体,三类智能体分别实现系统的三层功能。最后以航空集群反隐身任务为例进行分析。结果表明:该体系结构具有自适应性、鲁棒性,能够适应未来复杂多变的战争环境。
航空集群,体系结构,多智能体理论,集群反隐身
0 引言
未来作战环境将呈现不确定性、非结构性等特点,基于传统的机群作战空中作战体系构建与应用越来越明显地表现出能力的局限和不足[1]。正如美国空军顾问指出的一样:“未来的作战飞行器应当以成群而非单独的方式行动”[2],所以集群作战将是未来空中作战的主要样式[3-4]。
航空集群是由一定数量的单功能和多功能有人或无人航空飞行器共同组成,在交感网的支撑下,节点间具有交互与反馈、激励与响应等交感行为,整体具有涌现特点,可实现单个平台行为自主决策、平台间行为协同,最终产生能力涌现的自助式空中移动系统[3]。其运行结构是实现各类作战能力涌现的基础,是研究航空集群系统构建的基本前提。目前国内外研究的多飞行器体系架构主要包括集中控制式[5-6]和分布式[7]两种形式,其中文献[8]提出了集散式的控制体系结构;文献[9]给出了一种新型多无人机体系结构,在动态环境中由无人机自主构建团队和子团队;文献[10]按照分层递阶的方法将无人机编队系统分为两级分层控制结构和五层功能结构。
航空集群通过交感网实现集群信息的共享、集群行为的交感、集群能力的涌现,因此,与多无人机系统有本质的区别。本文基于Multi-Agent系统理论,采用传统的自顶向下的设计方法与基于涌现的自底向上设计方法相结合,对集群的体系结构展开探究。
1 航空集群体系结构
航空集群系统运行主要考虑系统的宏观表现、微观执行、内部信号/信息交互3个层面。系统行为控制的宏观表现具体体现为:战场态势、预定作战任务、上级实时指令等对系统行为调控,控制系统遂行相应作战任务、对敌方行动作出反应、执行相应战场指令等,即系统面向任务的聚集、变化、分解机制;系统任务的微观执行具体体现为:系统依据集群行为的自组织特性,在群内子系统对原子任务作出正确响应,即集群系统内部的自组织及能力涌现机制;系统内部信号/信息的交互主要体现为个体间交感信号/信息的高效传输、节点的激励与响应等内容,是集群能力涌现的基本支撑。
基于3个层面的考虑,采用自顶向下和自底向上相结合的方法,即由上而下的任务分解和由下而上的自组织执行任务,按照MAS的组织结构分类方法将航空集群系统运行结构分为三层:系统层、任务层、自组织层,如图1所示。

图1 航空集群系统分层模型
系统层是体系结构的顶层,是集群作战任务的主控层,负责根据战场态势发布作战指令,结合预置的作战模式对航空集群作战任务进行分解,实时掌握集群作战进程,产生原子任务激活信号,维持系统级任务按时序关系向前推进。
任务层是体系结构的中间层,是系统层任务分解后得到的原子任务管理层,负责管理原子任务激活时序,监控原子任务分配与运行状态,评估任务完成效果。任务层对上负责完成原子任务的组织和管理,对下负责原则任务的发布和完成度评估。
自组织层是体系结构的底层,也是功能层,由集群智能个体Agent组成,通过交感网络实现Agent之间的信息/信号传输和态势共享。Agent行为由上层原子任务驱动,通过Agent之间的局部交互协同,自组织完成原子任务,通过自组织机制实现能力涌现。
2 航空集群协作时序
依据系统的分层机制,航空集群系统的任务协作时序过程分为8个环节,如下页图2所示。
①当系统接受新的作战指令或航空集群系统感知到态势变化后,根据预置的系统作战模式将新的作战任务分解为一系列具有特定时序的原子任务;
②将原子任务发布到任务协调层,加入任务协调层中原子任务的调度管理队列;
③任务协调层根据任务之间的前驱、后继关系建立并行和串行的原子任务调度队列,并按时序激活相应原子任务,对自组织层个体产生激励信号;
④自组织层Agent依据集群智能算法和个体间的交感网络对激活的原子任务进行竞标,以最大化任务完成效能、最小化任务执行代价为目标,进行自主协同任务执行,并按Agent内部认知和能力模型的计算结果确定任务执行方式;
⑤自组织层各Agent通过不断接收原子任务,并以自组织执行的方式予以完成,一旦达到任务完成状态则向上层反馈完成信号;

图2 航空集群系统协作时序
⑥任务协调层在原子任务执行过程中始终进行监控,一旦下层反馈任务完成信号,任务层对其效能进行评估,以此决定是激活新的原子任务还是将该原子任务重新激活,重新执行;
⑦当评估结果显示原子任务均顺利完成时,产生任务完成的反馈信号;
⑧当任务调度队列中针对某项集群作战任务的全部原子任务均反馈完成信号后,任务协调层向系统层回送完成信号,从而使整个系统按时序推进到下一任务集。
3 集群飞行器Agent模型
结合Multi-Agent理论以及航空集群系统分层模型,将航空集群飞行器个体抽象为3类智能体:任务决策智能体(Decide Agent,DA)、任务管理智能体(Manage Agent,MA)和任务执行智能体(Execute Agent,EA)。其中,任务决策智能体实现系统层的功能,通常由集群中的有人航空器担任;任务管理智能体主要由系统内Agent经相应的筛选机制选举产生,其功能是实现对原子任务的有效管理;而任务执行智能体一般由相应的集群个体担任,在交感网的支撑下,实现自组织功能。
3.1 任务决策Agent结构模型
任务决策Agent具有决策功能。当航空集群在接收到外部的指令任务或者感知到战场态势变化后,任务决策Agent会综合外部指令、传感器信息以及全局知识库,将新的作战任务分解成为一定时序的原子任务,如图3所示。
传感器信息是各个任务执行Agent通过接口反馈给系统的信息总和,具体包括全局战场态势、各Agent的外部环境以及各Agent的实时状态;全局知识库则包括系统中总Agent数量、各Agent作战能力和预置的作战模式,系统决策Agent决策时能够结合当前知识库信息,迅速作出决策,提高效率,同时知识库的数据信息将会根据战争的时序推进并结合传感器信息实时更新;外部指令是地面指挥所(或者空中指挥所)在综合天基侦察预警信息、空中情报侦察信息和地基侦察预警信息的基础上,结合整体空情态势、预定的作战任务,发布的作战指令。
任务决策Agent的输入数学模型如下:
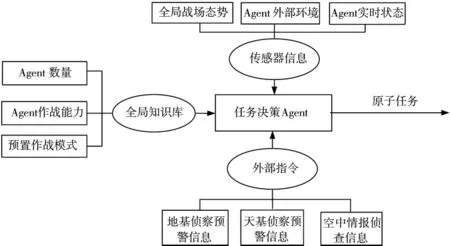
图3 任务决策Agent的输入、输出模型

式中,Global knowledge base表示全局知识库,Environment表示传感器信息,Demands表示外部对系统决策Agent的指令。

其中,Global knowledge base=<Sums,Abilities,Operational Modes>包括系统Agent的总数量,各Agent所具有的能力,预定的作战模式;Environment=<Location,Atate>,包括各Agent以及敌方飞机的位置与状态;Demands=<EI,AS…>,包括电子干扰、反隐身等。
系统决策Agent的输出模型如下:

Properties是对任务属性的描述,具体包括所要执行任务的类型、任务时限、所需保障信息及任务所需的其他条件;Abilities是完成原子任务所需个体Agent的能力集合,当系统决策Agent输出原子任务时,会激活任务协调Agent,系统中具有完成该原子任务能力的Agent会通过交感网接收到激励信号;Rules是指衡量任务进度的规则标准,包括原子任务完成的标准、任务终止的规则,当任务执行A-gent反馈的原子任务执行进度达到所规定标准的范围时,或者到达任务终止的规则时,原子任务结束。
3.2 任务管理Agent结构模型
任务管理Agent确定原子任务的激活时序,并始终监控原子任务完成情况,当评估所有的原子任务均顺利完成时,产生任务完成的反馈信号给任务决策Agent,其结构如图4所示,具体步骤如下。

图4 任务管理Agent结构
Step1任务管理Agent接收任务分解Agent输出的原子任务;
Step2任务管理Agent综合原子任务的属性以及系统中任务执行Agent的情况决定原子任务激活的顺序;
Step3原子任务发布,任务执行Agent接收到激励信号,自组织的完成任务;
Step4任务管理Agent对原子任务完成情况监控并进行评估;
Step5任务是否完成,完成停止,否则转Step2;
Step6待原子任务全部完成,任务管理Agent向任务分解Agent反馈任务完成信息后,系统进入到下一任务集。
3.3 任务执行Agent结构模型
任务执行Agent是完成原子任务的基本单元,一个原子任务主要由多个Agent共同聚集完成,一个Agent也可以参与多个原子任务。任务执行Agent可以用一个八元组表示:


其中,State是能力状态,表示个体当前状态:空闲、执行任务和战损;Condition是前提条件,表示EA执行该项原子任务所要的信息;Environment是外部环境,表示EA所感受到的原子任务对环境的刺激;Ability是个体的能力,表示在执行原子任务时所具有的能力;Cost是代价,表示在执行任务中Agent所要付出的代价;Reward是收益,表示在执行任务中Agent的收益;Rules为规则集合,表示个体在执行任务中必须遵循的行为规则,通常规则可以描述为一组或多组IF…THEN语句组成的集合;Message为信息传递机制,个体在与其他Agent完成任务过程中需要进行信息传递,以及信息共享。
其中能力状态、外部刺激、个体能力、代价与收益是个体Agent在接收到到原子任务的刺激之后,做出响应的基础。
3.4 Agents与Atom Tasks之间的拓扑关系图
原子任务被任务管理Agent激活之后,会对环境产生一定程度的刺激,个体Agent会对环境中的刺激进行响应,根据设定的阈值响应模型,选择最佳原子任务。当多个Agent共同响应同一原子任务时,Agent内部之间会有竞争博弈,一些刺激强度相对较弱以及个体经验相对不足的Agent会退出该原子任务,从而达到自组织的任务分配与完成。
图5表示Agents与Atom Tasks之间的拓扑关系图,该图只表示某一时刻的任务分配情况。当系统内任务变化或者节点战损时,该关系图将会发生变化。具体描述如下:
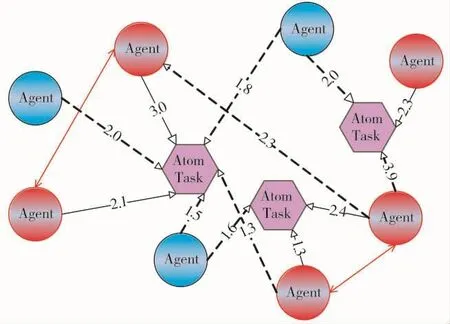
图5 Agents与Atom Tasks之间的拓扑关系图
(1)图中Agents与Atom Tasks连线表示Agents能够感受到Atom Tasks的刺激并响应,联系的强度通过线上的数值即Agents相应的能力度量表示;
(2)虚线表示Agents已经感受到Atom Tasks的刺激,但在与其他Agents的竞争博弈中处于劣势地位,不承担该任务;
(3)当Atom Tasks需要的能量度量值高于所需的单个个体所能输出的能量值时就需要多个Agent共同完成;
(4)图中红色Agent个体黑色和实线箭头表示当前激活的任务方案;
(5)Agent与Agent之间的连线表示通过交感网已经建立协作关系,共同完成某一原子任务。
航空集群能力涌现表现在依据个体能力和原子任务属性动态,自主地实现不同个体间的任务分配和任务协作,使得集群整体能力出超出个体能力的简单叠加。
4 实例分析
4.1 集群反隐身问题描述
航空集群协同反隐身[11-13]就是航空平台在执行反隐作战任务时,合理地协调两(多)架航空器平台之间的行为,使得资源得以合理运用,实现隐蔽接敌,获得较高的作战效能,顺利完成反隐身任务。
现假设航空集群 S(S1,S2,S3,S4,S5)执行协同反隐身作战任务,如图6所示。在执行任务时,航空集群拥有机动、敏捷的构型产生与变换能力,能够针对隐身目标的动态变化,适应性地改变收、发雷达的空间部署,快速切换雷达的收、发功能,从而改变集群雷达探测的空域覆盖方向、距离和区域,实现集群雷达功能的柔性重组,形成对隐身目标的稳定探测与跟踪以及火力打击。

图6 集群反隐身作战示意图
4.2 作战流程描述
下面对集群执行反隐身任务时的作战流程进行分析,模型如图7所示,具体描述如下:

图7 集群反隐身作战流程模型
(1)当集群S接收到反隐身任务的指令后,担任DA角色的航空器S1会结合预置作战模式、传感器信息及知识库中的规则将任务分解成原子任务:

即无源探测、有源探测、火力打击;
(2)航空器S1将原子任务的激励信号发送到担任MA角色的航空器S2;
(3)航空器S2(MA)根据作战时序按照PD、AD、AT的顺序依次激活发布各原子任务;
(4)集群内所有航空器均担任EA角色,航空器Si在接收到激励信号后,会作出相应响应并通过竞争博弈实现联盟完成任务,具体如下:首先由S1、S2、S3共同响应完成PD这一原子任务,随着战争时序推进,集群中 S1,S4,S5执行 AD 任务,当完成该原子任务之后,S4,S5最后实施AT,整个过程中S1同时承担接收机(R)、发射机(T)的角色,S4,S5同时承担接收机(R)、攻击机(A)的角色,也就是说智能体角色以及构型位置会根据目标的变化和时序推进动态调整,保证整个系统有很好的冗余度和可靠性;
(5)在任务执行过程中,原子任务的执行情况一直处于航空器S2(MA)的监控下,原子任务执行结束后会向航空器S2(MA)反馈信号,航空器S2(MA)评估后决定对原子任务的管理方案;
(6)当3个原子任务执行完成之后,航空器S2(MA)向航空器S1(DA)反馈任务完成信号,整个任务结束。
5 结论
本文以Multi-Agent理论为基础,对航空集群的体系结构进行了探究。将集群的体系结构分为三层,并定义了三类Agent,分别实现各层的功能,同时定义了各Agent的结构模型并建立了Agent与Atom Tasks间的拓扑关系图。以航空集群反隐身任务为例,对集群作战的整个流程进行了描述,结果表明设计的体系结构能够实现复杂环境下的作战要求。
[1]柏鹏,梁晓龙,王鹏,等.构建“航空集群”新型空中作战体系研究[J].空军工程大学学报(军事科学版),2014,14(3):11-14.
[2]SHIMA T,RASMUSSEN S.UAV cooperative decision and control: challenges and practical approaches [M].Philadelphia: Society for Industrial and Applied Mathematics,2008.
[3]梁晓龙,李浩,孙强,等.空中作战发展特征及对策[J].空军工程大学学报(军事科学版),2014,14(3):4-7.
[4]牛轶峰,肖湘江,柯冠岩.无人机集群作战概念及关键技术分析[J].国防科技,2013,35(5):37-43.
[5]谈大龙,黄闪.分布自主协作式的多机器人系统研究[J].机器人,1996,18(6):338-343.
[6]朱华勇,牛轶峰,沈林成,等.无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报,2010,32(3):115-120.
[7]姚宗信,李明,陈宗基.多机协同作战任务决策方法多智能体结构框架[J].电光与控制,2008,15(3):1-3.
[8]赵昀,李胜,陈庆伟,等.基于MAS的多无人机系统集散式控制体系结构研究[J].电光与控制,2009,16(6):1-4.
[9]袁利平,陈宗基.一种新型多无人机系统体系结构的设计[J].系统仿真学报,2008,11(22):6137-6141.
[10]李相民,颜骥,刘波.多无人机编队自主协同控制架构[J].电光与控制,2015,22(3):1-5.
[11]梁晓龙,张佳强,祝捷,等.基于CPS的空中交通系统架构及能力涌现方法[J].空军工程大学学报(自然科学版),2016,17(1):1-7.
[12]朱磊,梁晓龙,张佳强.航空集群雷达回波反隐身探测仿真研究[J].计算机仿真,2016,33(8):49-53.
[13]LIANG X L,SUN Q,YIN Z H,et al.A study of aviation swarm convoy and transportation mission[C]//Advances in Swarm Intelligence,4th International Conference ICSI 2013:368-375.
Research of Aircraft Swarms Architecture Based on MAS
ZHU Chuang-chuang,LIANG Xiao-long,ZHANG Jia-qiang,LIU Ping-ni
(School of Air Traffic Control and Navigation,Air Force Engineering University,Xi’an 710051,China)
The architecture of aircraft swarms is explored based on Multi-Agent theory.First,the traditional top-down and the bottom-up method based on the emergence is proposed and the swarm system is divided into three layers which includes system layer,task layer and self-organization layer.Then,Decide Agent,Manage Agent and Execute Agent are designed and the three kinds of agents can achieve the function of system of three layers respectively.Finally,an example of aircraft swarm antistealth task is analyzed.And the results show that the proposed architecture possesses characteristics of adaptability and robustness,which can adapt to the complex war environment in the future.
aircraft swarms,architecture,multi-agent theory,swarm anti-stealth
1002-0640(2017)10-0019-06
V271.4;TJ86
A
10.3969/j.issn.1002-0640.2017.10.005
2016-07-28
2016-10-15
国家自然科学面上基金(61472442,61472443);陕西省自然科学技术研究发展计划资助项目(2013JQ8042,2016JM6071)
朱创创(1989- ),男,江苏徐州人,硕士研究生。研究方向:航空集群理论与技术、冲突探测与解脱。