一体式全能包装机的设计与研究
2017-11-16张喜春方东伟
黄 飞,詹 江,张喜春,闫 杰,方东伟,蔡 勇
(合肥学院 机械工程系,合肥 230601)
一体式全能包装机的设计与研究
黄 飞,詹 江,张喜春,闫 杰,方东伟,蔡 勇
(合肥学院 机械工程系,合肥 230601)
随着电子商务的快速发展,包装、物流的需求也随之增长。一体式全能包装机针对尺寸、形状不同的物品实现内外两层自动包装,提高了包装效率,同时也一定程度上提高了物品的安全性。
物流;包装机;创新设计
随着经济社会的快速发展,物流行业的需求日趋增加,各国都致力于调整物流业结构、优化物流流程,从而降低物流风险与成本。物流包装作为物流中的重要环节,是物流运输、保管、搬运、流通加工等环节的保障因素。随着我国物流行业的蓬勃发展,许多急需解决的问题也接踵而至。在包装方面,传统包装以纸箱、纸盒等材料为主,而物品需要人工包装约需两至三层,工作量大,劳动强度大。另一方面,纸箱、纸盒的大量使用不符合环保的理念;纸箱、纸盒还易受潮,不能很好的保护物品;运输过程中容易损坏[1]。针对这些情况,设计了一种一体式全能包装机,以塑料薄膜为包装材料,可以实现不同形状、不同尺寸、不同大小的物品包装,并在包装完成后自动贴上标签。
1 总体设计
一体式全能包装机包括内包装机构、外包装机构两大部分。其中内包装机构由旋转移动平台、封口装置、推板装置、喷胶压紧装置组成;外包装机构由取物装置、撑袋装置、取袋装置、封口装置组成。机械结构包括齿轮齿条、蜗轮蜗杆、链传动等机构组成[2]。
运动机构包括丝杠模块、推板模块、旋转模块、贴带手臂转动等模块,各模块实现各自独立运动,同时各独立运动又相互联系。
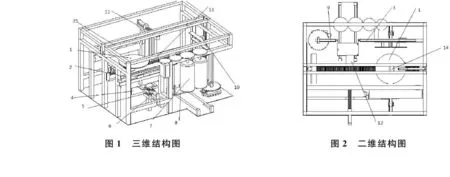
包装机的工作原理:首先当物品与塑料薄膜传动至载物台上时,采用丝杠平稳传动,物品上设置的超声波传感器可控制平台升降不同的高度。两侧推板实现包装膜的翻转包装。之后在喷胶压紧装置的作用下,使包装物填胶压实。通过旋转移动平台发生旋转与移动,适应不同距离进行封边。紧接着真空吸盘将物品吸到外包装,取袋装置对包装袋进行拾取,并通过旋转模块传动到物品下面,撑袋装置将包装袋撑开,包装物运入外包装袋,两边的双辊轮进行封口,实现内外二次包装[3-4]。结构如图1、2所示。
2 功能机构设计
2.1旋转平台
旋转移动平台的设计是为了适应不同形状、不同尺寸、不同大小的物品并进行包装,载物台可下降可左右移动、且可旋转,配合后续包装与封边,它通过齿轮啮合和齿条移动的配合通过电机驱动实现平台的旋转、移动。在平台上方的测距传感器用于测量物品的垂直位移,根据垂直位移的大小控制系统对升降机构的升降位置进行控制。
2.2推板装置
推板装置包括上下设置的水平推板和垂直推板,通过齿轮齿条的传动实现推板的运动。垂直推板和水平推板分别用于对包装产品的缓冲材料包装层进行第一次折叠和第二次折叠,在垂直推板前端设有压力传感器,对包装过程的准确性进行控制。设计中创新地利用推板模拟人手,使两级推板实现前后不同的运动进行包装。结构如图3、4所示。
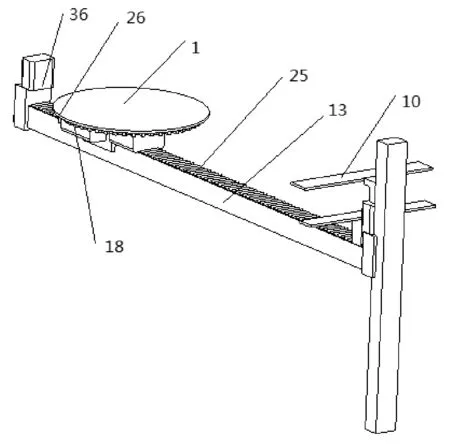
图3旋转平台结构图

图4推板装置结构图
2.3取袋、撑袋装置
取袋、撑袋装置用于从旋转平台平台上选取合适被包装物大小的外包装袋,旋转至对应位置并将外包装袋撑开。取袋装置包括立柱及在立柱上端一侧设置的真空吸盘,立柱通过驱动机构驱动其旋转,并通过另一驱动机构驱动其在竖直面上摆动。撑袋装置用于将外包装袋的袋口撑开,包括水平的撑袋杆及撑袋杆前端设置的真空吸盘,尾端通过气缸驱动其沿着撑袋杆的长度方向来回移动。结构如图5所示。
2.4封口装置
封口装置包括竖直方向上并列设置且转向相反的两个加热辊,在加热辊下方设有一个活动板,活动板沿着加热辊的轴线基准面垂直方向来回运动,带动外包装袋的袋口经过两个加热辊从而实现封口。本封口装置可适应不同大小的包装袋,且封口效果明显。结构如图6所示。

3 机构功能模拟
为验证装置机构可行性,利用慧鱼组合机构模型实现装置机构及功能模拟。慧鱼组合机构模型是工程技术拼装模型,包括机械、电气基本元件和传感器、控制器、执行器等,可以实现运用设计构思和实验分析,达到技术过程的还原,并运用图形化编程ROBO Pro及硬件和接口模块实现工业生产和大型机械设备操作的模拟[5]。如图7所示。

图7 控制程序图
利用慧鱼组合机构模型的特点,突破传统设计方法,对包装机的功能实现模块化设计,通过先分解模块设计再有机组合的方法,通过优化设计实现机构的功能。
4 结 语
一体式全能包装机能极大满足电商物流对于物品包装的要求,整体结构紧凑、操作简单、能适应不同尺寸和形状的物品包装,自动化程度高,减少了人工操作强度,使包装效率得到了极大提高,所设计的内外两层包装机构能有效提高物品在物流运输过程中的安全性。
[1] 曾宗易,叶浩 .包装设计实用技术手册[M]. 北京:印刷工业出版社,2007:37-46.
[2] 孙桓,陈作模,葛文杰.机械原理[M].8版.北京:高等教育出版社,2013:307-327.
[3] 杨良渠,杜力.包装机械原理与设计[M].成都:西南交通大学出版社,2014:390-398.
[4] 刘筱霞.包装机械与设备[M].北京:化学工业出版社,2012:143-172.
[5] 景伟华,曹双. 机器人创新设计——基于慧鱼创意组合模型的机器人制作[M].北京:清华大学出版社,2014:49-56.
TheDesignandResearchofAll-in-onePackagingMachine
HUANG Fei,ZHAN Jiang, ZHANG Xi-chun,YAN Jie,FANG Dong-wei,CAI Yong
(Department of Mechanical Engineering,Hefei University,Hefei 230601,China)
With the rapid development of e-commerce, the demand for packaging and logistics had also increased. The all-in-one universal packaging machine realized the automatic packaging of inner and outer layers according to the size and the shape of the articles, and improved the packaging efficiency, at the same time, improved the safety of the articles partly.
logistics;packaging machine;innovative design
2017-07-01
2017-09-10
安徽省2016年省级大学生创新创业训练计划项目(201611059178)资助。
黄 飞(1978— ),男,安徽怀宁人,合肥学院机械工程系讲师。
TB486
A
2096-2371(2017)05-0102-03
[责任编辑:张永军]