基于再生运动链法的锁芯机构创新设计
2017-11-15宋萌萌肖顺根林世斌
宋萌萌 肖顺根,2 林世斌
1.宁德师范学院信息与机电工程学院,宁德,3521002.上海大学机电工程与自动化学院,上海,200072
基于再生运动链法的锁芯机构创新设计
宋萌萌1肖顺根1,2林世斌1
1.宁德师范学院信息与机电工程学院,宁德,3521002.上海大学机电工程与自动化学院,上海,200072
在分析现有锁具机构的基础上,应用机构再生运动链设计法对机构进行还原再生,找出满足拓扑要求与约束要求的非同构运动链,从而实现新锁具的机构创新。首先应用一般化原则将现有玥玛空转锁芯机构转化为与之对应的一般化链;然后运用数综合理论,对原型的机构运动链进行还原,找到所有可能的具有相同构件数和运动副数的一般化运动链图谱;再根据设计要求与约束对运动链进行元件识别,从而得到可行特定化链;最后由可行特定化链具体化为新的锁芯机构方案简图。利用三维软件对新设计的锁芯机构进行三维建模并分析其工作原理,结果表明设计的锁芯机构是合理的,并申请了2项国家发明专利。
空转锁芯;机构再生运动链设计法;一般化原则;数综合;三维建模
0 引言
锁具是人类生活中不可或缺的机械装置。从早期的绳结锁到木锁,从金属锁到现代电子锁,锁具结构不断演变,其设计概念应用了仿生学原理、杠杆原理,以及编码原理等。虽然将来会有越来越多的锁具包含电子元器件,但是机械锁具的改进一定会继续进行下去,因为在未来相当长的时期内,机械锁具将不会被其他新型锁具所取代,它仍将占据主流地位。锁具在人们的生活中被用于保护私人财产安全,这使得对它的安全技术的创新开发具有非凡的意义。
就金属机械锁而言,现代锁具中的空转锁芯技术是一个非常成功的发明,可以说它是一个里程碑式的发明。虽然不同厂家在技术设计上略有不同,如 “无簧空转/精钢乱码锁”[1]、玥玛锁的“空转锁芯”、旋转弹子锁、旋转扣槽弹子锁等,但其空转原理大体上是相同的,并且以上列举的锁具发明都是超B级锁具。另外陈立蓉等[2-3]设计了“J型锁芯”结构防盗锁[2]和“卡片”式机械锁[3]。叶片空转锁的工作原理是,将原配钥匙插进锁芯内,钥匙上的“牙花”与锁芯内的叶片级差相吻合,叶片上的级差凹槽就组合成一道直凹槽,在活动销子上方(外壳)的弹力压簧作用下,销子完全滑入凹槽内,中壳内的活动销子也同时随着落下,连接后级形成一体,此时,如果转动钥匙,形成一体后的锁芯就会带动其他机械部分一起旋转[4],如果是非原配钥匙或其他物体插进锁芯,则无法达到前后级完全吻合,只能转动前级,形成空转。
锁具设计的核心在于锁芯机构的创新设计,再生运动链设计法是创新设计中较为常用的一种方法,文献[5-8]将该方法应用于齿轮传动、抽油机、连杆、成形鼓等机构中,得到了需求机构。本文应用机构再生运动链设计法对锁芯机构进行创新设计,通过研究锁芯内部机构的工作原理并对它进行一般化、数综合,得到原始的运动链图谱,找出可行特定化链图谱,创造出新的锁芯机构。
1 再生运动链法原理
机构再生运动链设计法是以现有装置为基础构想出机械装置全部可能的拓扑构造的一种创造性设计法,可以发明、创造出新型机构[9],它是颜鸿森[10]通过系统总结机构数综合理论成果并示例化的机构创新设计方法。该方法具体分为6个步骤,其设计流程如图1所示[11]。

图1 再生运动链设计法流程图Fig.1 A flow chart of the design method ofregenerative kinematic chain
2 锁芯机构的创新设计
锁芯机构是锁具的核心元件,是锁具验证钥匙正确性的关键。对于金属机械锁,锁芯以外的部分可以概括为是一个凸轮机构或凸轮机构加上几个基本杆组构成。钥匙插入锁芯后带动凸轮机构,拨动锁栓开锁。现代机械锁种类繁多,根据防盗级别可分为A级、B级。B级锁中有“无簧空转/精钢乱码锁”、“空转锁芯”的玥玛锁、旋转弹子锁、旋转扣槽弹子锁等。
本文主要在现有空转锁芯的基础上进行创新设计,应用机构再生运动链设计法进行设计,找出满足拓扑要求与约束要求的非同构运动链,获得全新的锁芯机构。
2.1空转锁芯的现有设计
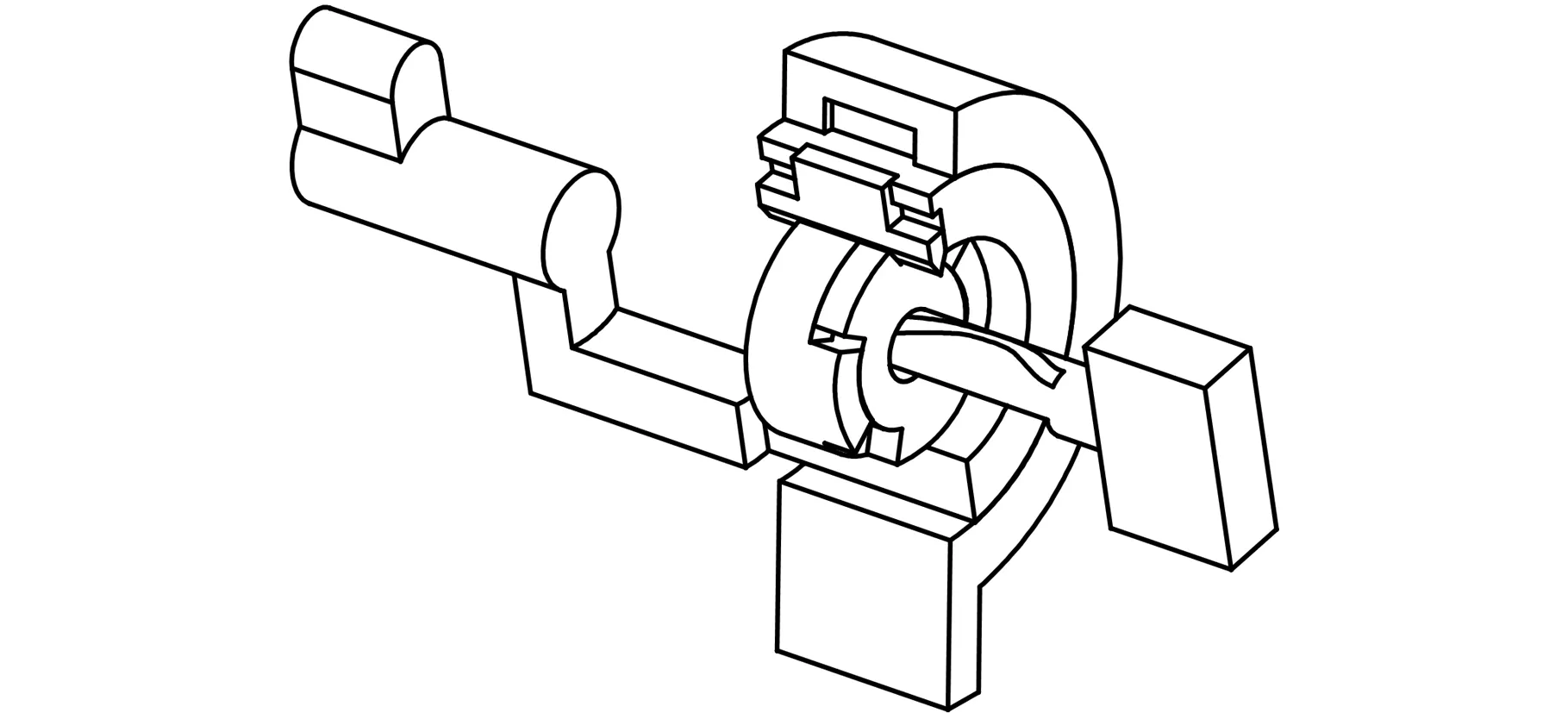
选用玥玛空转锁芯的机构(图2)为现有设计。玥玛空转锁芯将传统的弹子锁上下弹孔的对孔相互穿插锁定改为用弹片相互位置滑动加上一个整体键子进行锁定[12]。根据图2所示的空转锁芯,其开锁过程分析如下:插入正确钥匙,拨动弹片到相应位置;当所有弹片的键槽齐集于锁芯槽坑之处时整体键子落下;整体键子落下后,与它相对固定的销落入锁芯的后节,使锁芯前节后节成为一体,使后节可以被转动。

图2 玥玛空转锁芯Fig.2 Idle lock core of Yue Ma lock
空转锁芯的机构简图见图3,其拓扑特性如下:它是由6个构件和8个运动副构成的机构;它有1个机架(构件5)、1个内圈(构件1)、1个整体键子(构件2)、1个弹片(构件3)、1个钥匙凸块(构件4)和1个锁芯后节(构件6);它具有4个移动副(b、c、d、g)、2个凸轮副(e、f)和2个转动副(a、h)。
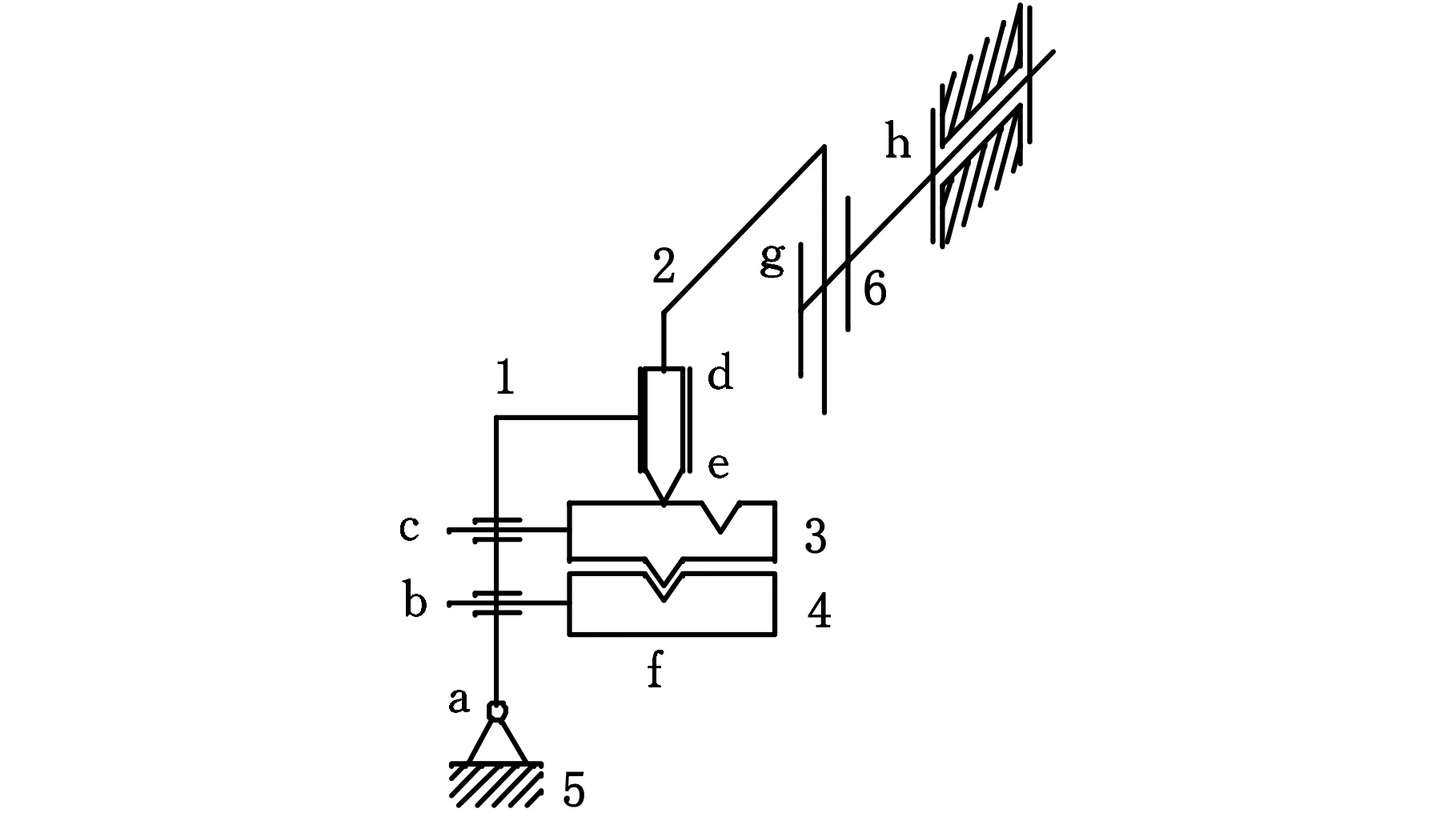
图3 空转锁芯机构简图Fig.3 Mechanism diagram of idle lock core
该锁芯机构的自由度为1,当去掉锁芯后节即空转时,它的自由度为2,并且它由闭合链变为一个开链,构件5变成开链的一端。其拓扑构造矩阵表示为
(1)
一个构件数(或杆件数)为NL、运动副数为NJ的机械装置(NL,NJ)的拓扑构造矩阵MT为方阵,其对角元素eii=Ki,非对角元素eij=A(i≠j), Ki表示第i个构件,A表示运动副类型或标号。eij≠0表示i杆和j杆存在附随关系,否则eij=0。例如,e11= K1表示第1个构件;若构件1和构件2邻接,则元素e12=JP,表示构件1和2之间运动副类型为JP,元素e21=d表示该运动副的标号为d;若构件1和2互不邻接,则e12=e21=0。JP表示移动副,JR表示转动副,JA表示凸轮副。
2.2一般化过程
根据一般化原则,对图3中的机构进行一般化。具体过程如下:①将机架(构件5)释放并一般化为二副杆5;②将内圈(构件1)一般化为四副杆1;③将整体键子(构件2)一般化为三副杆2;④将弹片(构件3)一般化为三副杆3;⑤将钥匙(构件4)一般化为二副杆4;⑥将锁芯后节(构件6)一般化为二副杆6;⑦将凸轮副(运动副e)一般化为带有2个转动副i、j的二副杆7;⑧将凸轮副(运动副f)一般化为带有2个转动副k、m的二副杆8;⑨将所有移动副(b、c、d、g)转化为转动副(b、c、d、g)。
经过转化后得到图4所示的一般化链,可知这是一个具有8个一般化连杆和10个一般化运动副的一般化运动链。

图4 空转锁芯的一般化链Fig.4 Generalized chain of idle lock core
2.3数综合过程
2.3.1自由度数与综合连杆类配的计算
选择闭合情况下的自由度,显然自由度为1。
由2.2节可知,一般化链的NL=8、NJ=10、Fp=1(Fp为自由度)。根据相关理论[11],它的连杆类配AL计算过程如下。
连杆类配AL是指链中连杆的数目类型,类型包括二副杆(NL2)、三副杆(NL3)、四副杆(NL4)等数目组成,表示为
AL=[NL2/NL3/NL4/…]
因为一般化链是连通、闭合且无分离杆的,所以(NL,NJ)一般化链的连杆类配可以由下式求出:
NL2+NL3+…+NLi+…+NLm=NL
(2)
2NL2+3NL3+…+iNLi+…+mNLm=2NJ
(3)
式中,NLi为i副杆的数目;m为最多副杆所附随的运动副数。
并且NJ还受下式制约:
NL≤NJ≤NL(NL-1)/2
(4)
根据图论的基本概念可得
(5)
由于NJ满足NL≤NJ≤2NL-3,经计算得mmax=4,因此,求得所有可能的连杆类配为:[5/2/1],[6/0/2],[4/4/0]。
2.3.2综合缩杆类配的计算
缩杆类配ACL=[NC1/NC2/NC3/…](其中NC1表示拥有1个二副杆的缩杆数量,NC2表示拥有2个二副杆的缩杆数量,NC3类似),相当于对NL2进行分割,分割后由NC个部分组成,且满足
NC1+NC2+…+NCr=NC
(6)
NC1+2NC2+…+rNCr=NL2
(7)
其中r≤FP+1,NC满足

(8)
其中
2Jm=3NL3+4NL4+…+mNLm
(9)
(10)
式中,Nm为多副杆数目。
由式(6)~式(10),可以计算出同一连杆类配的所有缩杆类配,得到结果如下:

2.3.3综合附随运动副序列的计算
缩杆邻接矩阵MCLA定义如下:将运动链中串联在一起的二副杆视为一个缩杆,在缩杆邻接矩阵MCLA中,如果对角线元素eii=+4,则表示该连杆的种类为四副杆;如果eii=-5则表示杆i是一个串联了5个二副杆的缩杆;非对角线元素eij=w,表示杆i与杆j之间附随的运动副数,如两者之间有1个运动副,则eij=1,同时可知w的值只会是0、1、2,无其他可能。为方便起见,将矩阵MCLA分割为4个子矩阵Mul、Mur、Mll、Mlr,即
式中,Mul为多副杆子方阵;Mur为多副杆与缩杆邻接关系子阵;Mll为Mur的转置矩阵;Mlr为缩杆子方阵。
在构造Mul之前,必须先综合出所有的多副杆与多副杆之间的附随运动序列H={a1,a2,…,ai,…,aNm},ai的下标i为多副杆的标号,ai的数值表示该多副杆与其他多副杆之间的运动副数的总和,即该对角元素所在的行或列除自身外所有元素之和,即
(11)
令ai的和为2Jd,并且有
2Jd=2Jm-2NC
(12)
对于综合运动副序列,在计算过程中可以把2Jd分成k部分,相当于有k个构件,共2Jd个运动副,所以只有k个多副杆分配了运动副,其余多副杆没有分配运动副,即k≤Nm。同时为避免出现子刚性链,k还需满足下面2个限制条件:①分割的最大部分的附随运动副数t应小于k且小于多副杆的运动副数,即t
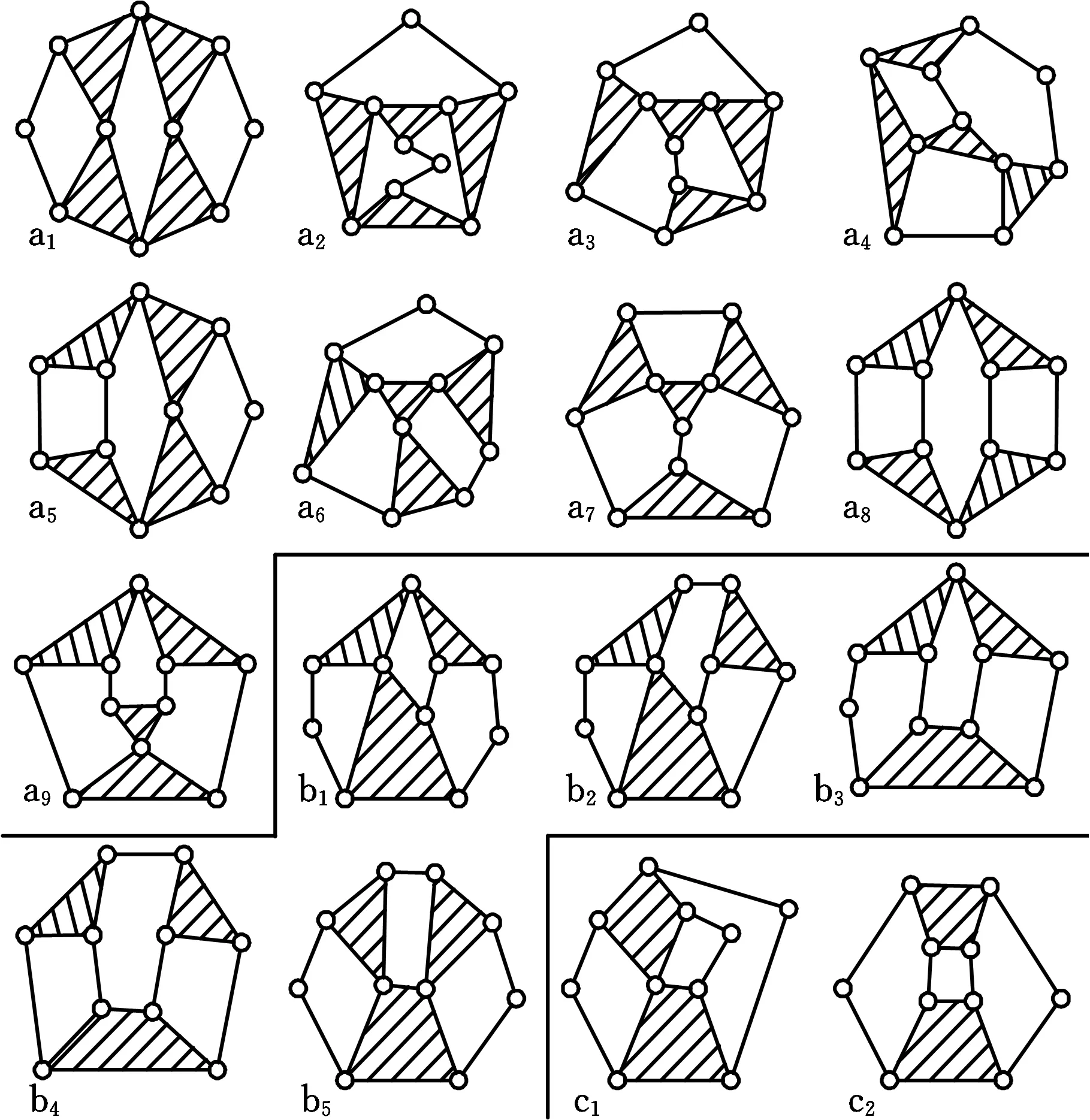
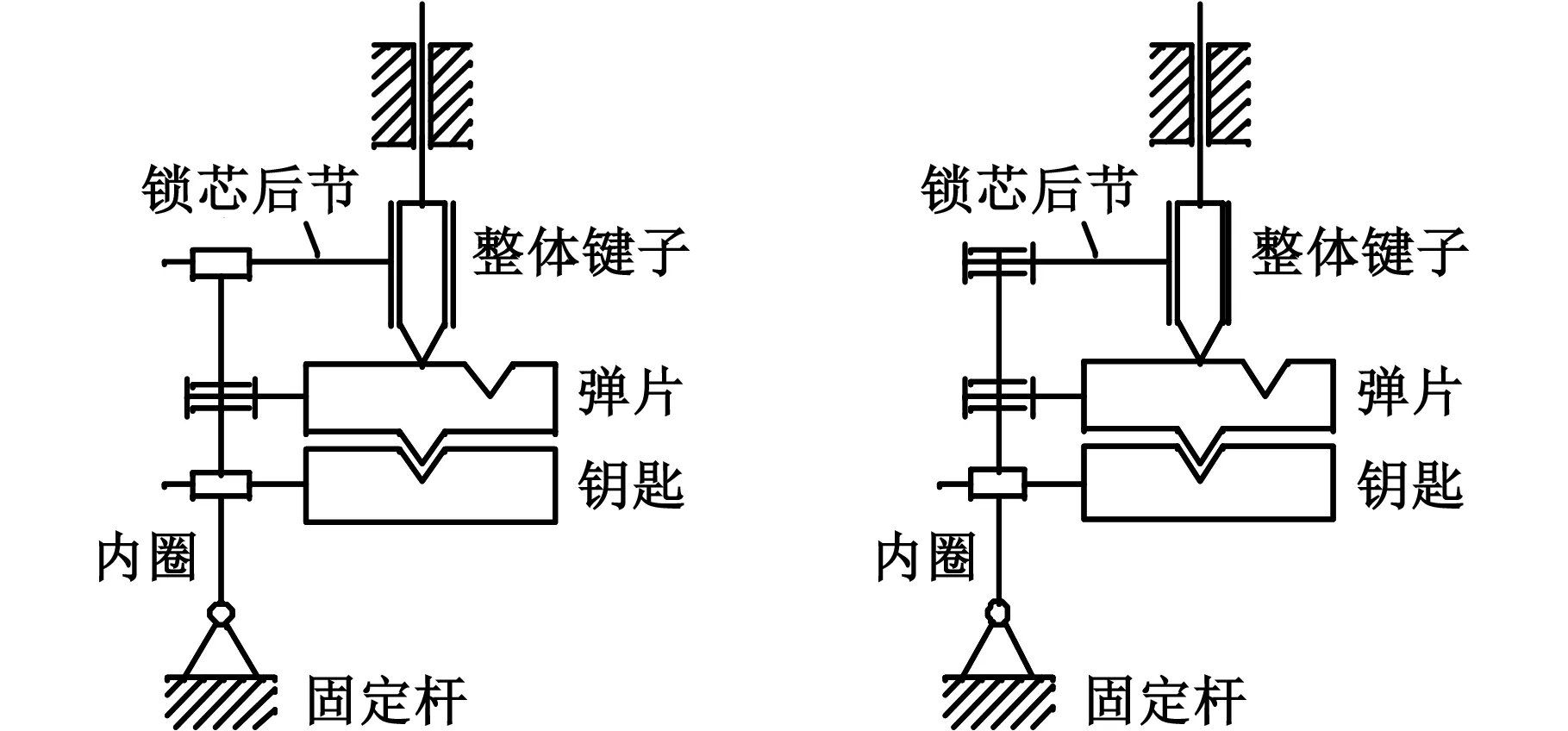
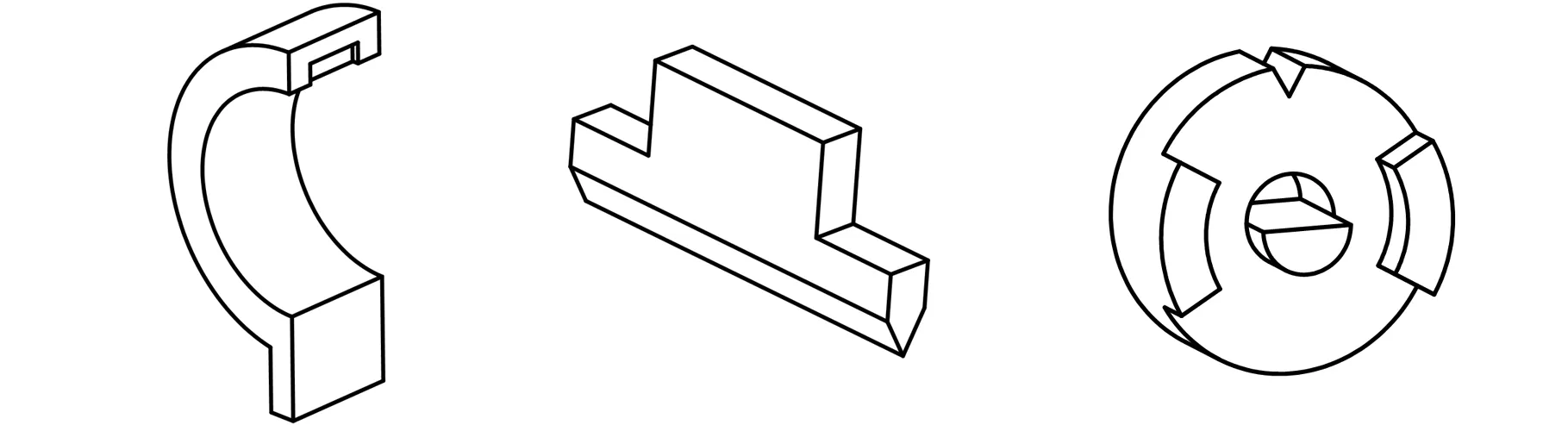
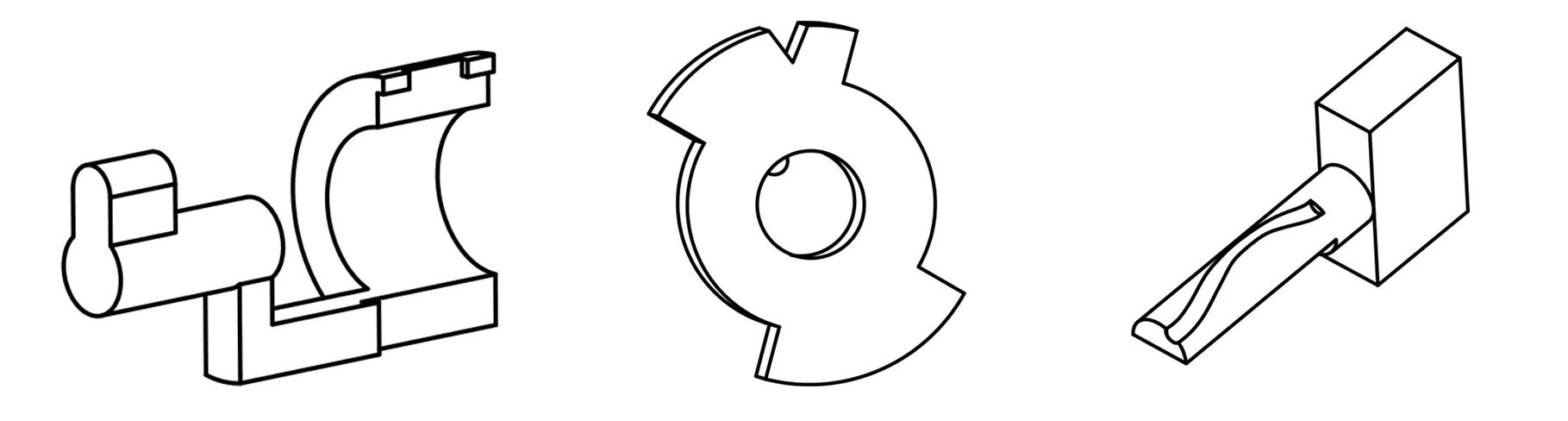
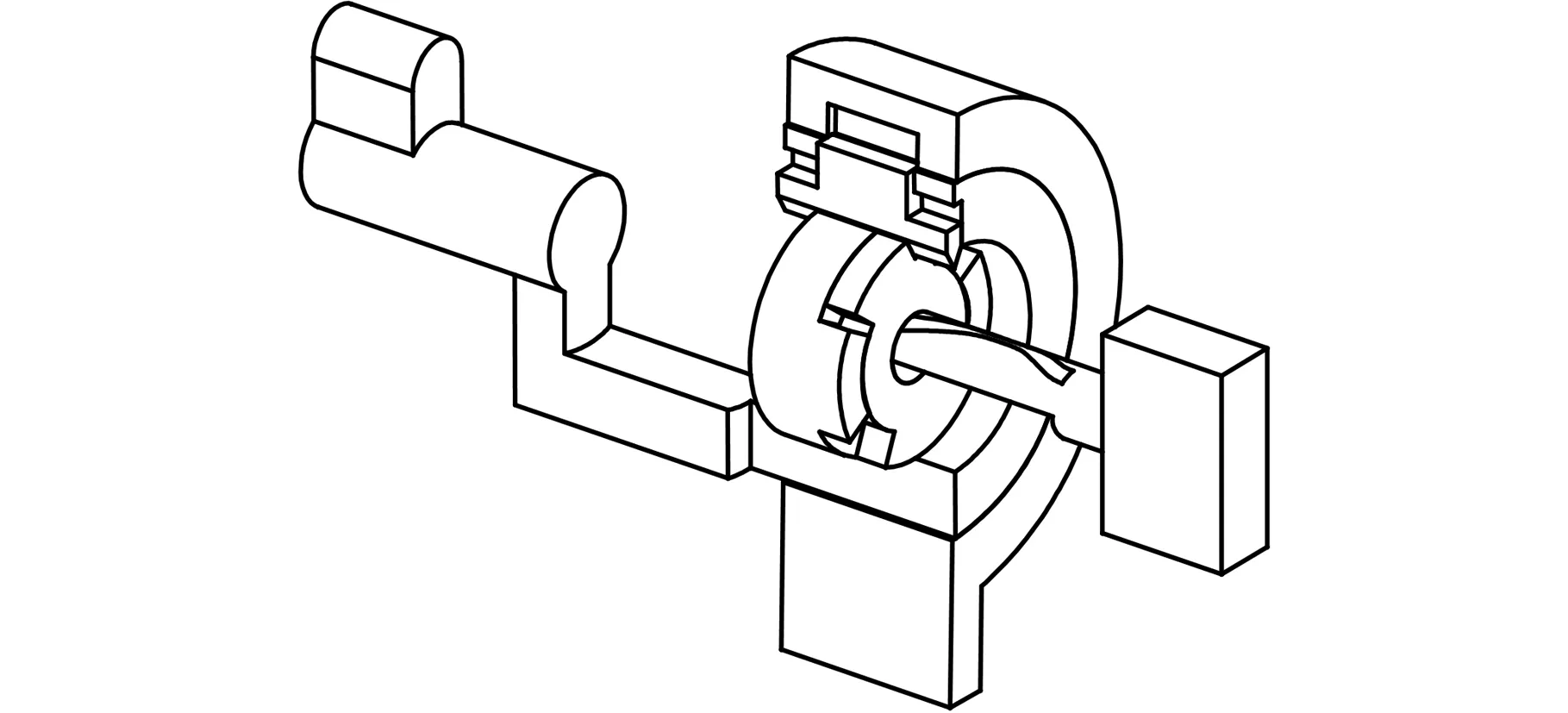
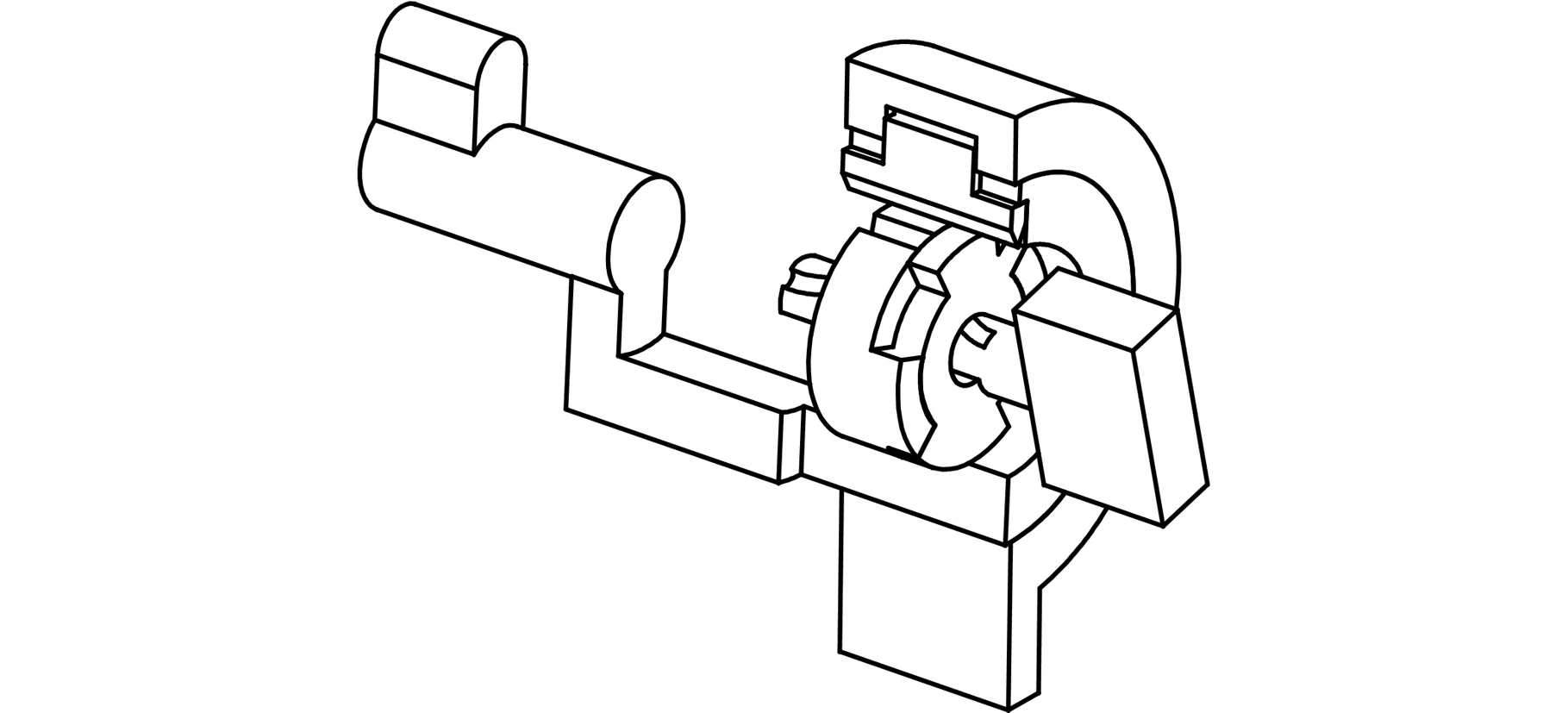
(1)连杆元素序列为(4,3,3,-1,-2,-2),且Jm=5,Nm=3,NC=3,Jd=2,k≤3。由限制条件②可得,k≥3,同时t (2)连杆元素序列为(4,3,3,-1,-1,-1,-1,-1),且Jm=5,Nm=3,NC=5,Jd=0,所以k=0,H3={0,0,0}。 (3)连杆元素序列为(4,4,-2,-2,-2),且Jm=4,Nm=2,NC=3,Jd=1,k≤2。由限制条件②可得,k>1,所以k=2同时t (4)连杆元素序列为(3,3,3,3,-1,-1,-1,-1),且Jm=6,Nm=4,NC=4,Jd=2,k≤4。由限制条件②可得,k≥3同时t (5)连杆元素序列为(3,3,3,3,-1,-1,-2),且Jm=6,Nm=4,NC=3,Jd=3,k≤4。由限制条件②可得,k>3同时t (6)连杆元素序列为(3,3,3,3,-2,-2),且Jm=6,Nm=4,NC=2,Jd=4,k≤4。由限制条件②可得,k≥4同时t 2.3.4综合矩阵Mul的计算 对缩杆邻接矩阵对角元素为(4,3,3,-1,-2,-2),所对应的Jd=2,2Jd=4,H1={2,1,1},H2={1,2,1},对矩阵Mul的对角元素eii=(4,3,3)进行标号,其集合定义为SML={1,2,3},可得其连杆群为 DL={PL1,PL2} 其中,[2/3]表示构件2和构件3具有相似性,两个构件互换后与其他构件的附随关系不会改变。 其运动副群为 DJ={PJ1,PJ2} 可得连杆相似类为{1}、{2,3},运动副相似类为{e12,e13}、{e23}。 将Jd个“1”分配给非对角线元素eij,其余元素为“0”,同时每列的和需满足式(11)。先将2个“1”分配给运动副相似类{e12,e13},得到(1,1)、(1,0)两种结果;对于结果1(1,1),没有排列被破坏,继续以此排列群为修正排列群进行分配,可得(1)、(0),其中(1)不满足条件;对于结果2(1,0),排列PJ2被破坏,去除此排列并修正排列群进行分配,可得(1)、(0),其中(0)不满足条件。 与H1对应的矩阵为 与H2对应的矩阵为 根据H1到H2计算Mul的方法,同理可得H3到H8对应的Mul矩阵,在此不赘述。 2.3.5综合矩阵Mur的计算 综合矩阵Mur的求法与综合矩阵Mul类似,过程相当于将2NC分配给Nm个多副杆,设bi=eii-ai,Hr={b1,b2,…,bi,…,bNm},其中,bi为矩阵Mur每行元素之和,同时每列之和必须等于2,其限制条件描述如下: (13) (14) 当连杆类配AL=[5/2/1]、缩杆类配ALC=[1/2]时,易得eii=(4,3,3,-1,-2,-2),H1={2,1,1},Nm=3,NC=3。根据前一部分Mul的计算思路,同理可得 多副杆有两个排列:[1] [2] [3]和[1] [2/3],而缩杆的连杆排列群也有两个排列:[4] [5] [6]和[4] [5/6],两者组合后形成4组排列: DL={PL1,PL2,PL3,PL4} 其运动副群为 DJ={PJ1,PJ2,PJ3,PJ4} 可得连杆相似类为{1}、{2,3}、{4}、{5,6};运动副相似类为{e14}、{e15,e16}、{e24,e34}、{e25,e26,e35,e36}。 然后,采用类似上节的方法进行分配后可得矩阵Mur为 相应可得AL=[5/2/1]、ALC=[1/2],H1={2,1,1}时的缩杆邻接矩阵为 或 其他对应的缩杆邻接矩阵可由上述方法求得。 最后可求得8杆10副对应的一般化运动链的数目共有16个。(8,10)一般化运动链图谱如图5所示,图谱中a类运动链的连杆类配为AL=[4/4/0],b类运动链的连杆类配为AL=[5/2/1],c类运动链的连杆类配为AL=[6/0/2]。 图5 (8,10)一般化运动链图谱Fig.5 The chart of generalized kinematic chainfor (8,10) 2.4特定化过程 2.4.1设计约束 根据现有设计的拓扑构造,归纳设计要求与约束情况如下: (1)机架(固定杆)。应有一个固定杆为机架;机架应与内圈有附随关系;机架不可能与钥匙有附随关系。 (2)内圈杆。内圈杆与叶片杆、钥匙杆存在附随关系;内圈是一个三副杆或四副杆。 (3)钥匙。钥匙是一个二副杆。 (4)弹片。弹片与钥匙存在附随关系,它也应为三副杆。 (5)整体键子。整体键子是锁芯前后两节联系的载体,所以它与锁芯后节存在附随关系;同时,它与弹片存在附随关系,但一定与钥匙不邻接;因为它沟通前后部分,所以它必然还与前节中的某一部分邻接,所以它也是一个多副杆。 (6)凸轮副。钥匙与弹片间为凸轮副,即二副杆,弹片与键子之间也一样。 2.4.2特定化 根据上述设计要求与约束,以及数综合得到的一般化运动链图谱,可得图5所示b类图中的第2个图谱b2和第5个图谱b5均符合设计要求与约束要求,且第5个图谱b5也是现有设计的一般化链。针对图5中图谱b2所示的(8,10)运动链,先将此链标号,如图6所示,再找出所有可能的特定化链。 图6 b2一般化链的标号Fig.6 The label of generalized kinematic chain for b2 由图6可得此一般化链的连杆群为 DL={PL1,PL2} 其运动副群为 DJ={PJ1,PJ2} 可得连杆相似类为{1}、{2}、{3}、{6}、{7}、{8}、{4,5};运动副相似类为{a,d}、{e,f}、{b}、{c}、{g}、{h}、{i}、{j}。 (1)钥匙杆。根据设计要求可知钥匙杆在一个有2个二副杆的缩杆上,所以可以确定,钥匙杆为连杆8,同时运动副i、j和连杆7相当于凸轮副。 (2)弹片杆。由于弹片杆是三副杆且与钥匙邻接,所以可知,弹片杆为连杆2,同时运动副h、g和连杆6相当于凸轮副。 (3)整体键子。易知连杆3为整体键子。 (4)内圈杆。剩下的一个多副杆1为内圈杆。 (5)固定杆和锁芯后节。由上述相似类中可以看出,连杆4与连杆5是等价的,所以选择连杆4为固定杆,连杆5为锁芯后节。 (6)转动副与移动副。根据设计要求可知,内圈与固定杆之间的运动为转动,所以运动副a为转动副;钥匙与内圈之间的运动为移动,所以运动副b为移动副;因为键子与锁芯后节和机架都是径向移动的,所以运动副e、f都是移动副。剩下的运动副有(c,d),设分配的移动副记为“1”,转动副记为“0”,如此分配共有4种可能,即(1,1)、(1,0)、(0,1)、(0,0)。因此,可得到图7所示的特定化链。 (c)(0,0)的特定化链 (d)(0,1)的特定化链图7 特定化链表示图Fig.7 The representation chart of the specific chain 2.5具体化过程 参照原有的锁芯机构设计,对图7所示的4种特定化链分别绘制出相应的机构简图见图8。 (a)(1,1)特定化链 (b)(1,0)特定化链 (c)(0,1)特定化链 (d)(0,0)特定化链图8 具体化的机构简图Fig.8 Specific mechanism diagram 为了说明新设计机构的合理性,以图8d为例,利用Solidwork三维软件建立图8d所示的具体化机构简图的三维模型。先建立所有零件的三维模型,再建立它们的装配体。通过基本的拉伸、旋转、切除、扫描等操作进行三维建模,所建立的零件模型如图9所示。 (a)零件1固定杆 (b)零件2整体键子 (c)零件3内圈 (d)零件4锁芯后节 (e)零件5叶片(弹片) (f)零件6钥匙 图9 新型锁芯零件模型Fig.9 Part model of the new lock core 然后建立新型锁芯机构的装配体,通过零件之间的关系来选择配合,锁芯机构的装配体如图10所示。 图10 新型空转锁芯机构装配图Fig.10 Mechanism assembly diagram of the new idle lock core 新型空转锁芯机构主要由图8d所示机构经过运动副的变异和机构的结构变异演化成图10所示的三维机构,该机构主要采取旋转式叶片作为移动障碍物,以此来实现对钥匙的检验。 在零件3内圈边缘表面,沿内圈的纵切面加工一道槽,旋转的叶片边缘也有同样的槽,不过初始位置存在偏角。同时,支架和外圈上存在相应的滑块腔。每个旋转叶片都相当于一组弹子,如果有m个角度区域,n级叶片,理论上就有mn组钥匙编码。叶片内圆上有凸起与钥匙上的槽配合,两者与圆柱凸轮副配合从而带动叶片转动。 钥匙上的曲面槽相应的偏角与相应叶片槽的偏角相适配。当钥匙未插入或者不正确的钥匙插入时,旋转叶片将偏转不对应的角度,使得叶片上的槽无法与内圈上的槽吻合,则滑块无法下降。滑块无法下降使得外圈与固定支架锁定,而内圈可自由转动。如果此时是不正确的钥匙插入,则锁芯将会空转(即不正确的钥匙也能转,但是无法驱动锁栓),如图11所示。 图11 空转状态示意图Fig.11 Idle state diagram 当正确的钥匙插入锁芯时,旋转叶片将偏转对应的角度,使得叶片上的槽与内圈上的槽吻合,滑块被弹簧压下。滑块压入内圈的槽中,使外圈与固定支架的锁定被解除,而内圈与外圈相互锁定并且可自由转动。由于外圈与拨动锁栓的凸轮相连,随着钥匙的旋转,内圈带动外圈的凸轮来驱动锁栓,从而锁被打开,如图12所示。 图12 开锁状态示意图Fig.12 Unlocked state diagram 本文以现有的空转锁芯为基础,应用机构再生运动链设计法进行创新设计。首先对其机构简图进行一般化,然后应用数综合理论对所得的8杆10副一般化链进行数综合。数综合的结果一共得到16个一般化运动链图谱,并可分为三类:a类为二副杆4个,三副杆4个;b类为二副杆5个,三副杆2个,四副杆1个;c类为二副杆6个,四副杆2个。随后根据之前得到的设计要求与约束,对一般化链图谱进行特定化,得到 4个可行特定化链,最后对所得的特定化链进行具体化,进而得到新的锁芯机构简图。 为了便于分析新机构的工作原理与该方案的可行性,利用三维软件对其进行三维建模。最后,通过对模型的分析,表明新设计的锁芯机构是成功的,并且对新设计的锁芯机构申请了2项国家发明专利。 [1] 赵杰,张继阳.真安锁业:“精钢乱码”圆梦居有“锁”安[J].中国发明与专利, 2014(2):110-115. ZHAO Jie, ZHANG Jiyang. True Security Lock Industry: Dream Home Is Safe as a Result of “Steel Distortion”[J]. China Invention & Patent, 2014(2):110-115. [2] 陈立蓉,杨随先,陈自强.“J型锁芯”结构防盗锁的设计[J].机械,2015(4):62-65. CHEN Lirong, YANG Suixian, CHEN Ziqiang. Research on an Innovative Design of J-type Antitheft Lock[J]. Machinery, 2015(4):62-65. [3] 陈立蓉,杨随先,陈自强.“卡片”式机械锁创新设计[J].机械设计与制造,2016(4):73-79. CHEN Lirong, YANG Suixian, CHEN Ziqiang. An Innovative Design on “Card-type” Mechanical Lock[J]. Machinery Design & manufacture, 2016(4):73-79. [4] 李文石.锁具史图说[M].上海:上海书店出版社,2007. LI Wenshi. Locks History Description[M]. Shanghai: Shanghai Bookstore Publishing House, 2007. [5] POZHBELKO V.A Unified Structure Theory of Multibody Open-, Closed-, and Mixed-loop Mechanical Systems with Simple and Multiple Joint Kinematic Chains [J]. Mechanism & Machine Theory, 2016, 100: 1-16. [6] CHU Jinkui, ZOU Yanhuo. An Algorithm for Structural Synthesis of Planar Simple and Multiple Joint Kinematic Chains [J]. Proceedings of Institution of Mechanical Engineers Part C—Journal of Mechanical Engineering Science, 2014, 228 (12) :2178-2192. [7] ZOU Yanhuo, CHU Jinkui. A Method for Isomorphism Identication of the Gear Train Kinematic Chains [J]. Journal of Information and Computational Science, 2014, 11 (7):2125-2134. [8] 张宁, 姚立纲, 张 炜.基于再生运动链法的游梁式抽油机机构创新[J].机械设计与研究, 2014,30(5):41-49. ZHANG Ning, YAO Ligang, ZHANG Wei. Regenerating Kinematic Chain and Its Utilization in the Innovative Design for Beam Pumping Unit Mechanism[J]. Machine Design and Research,2014,30(5):41-49. [9] 褚金奎, 邹炎火. 平面含复铰及齿轮-连杆运动链的拓扑描述和 结构自动综合[J].机械工程学报, 2015, 51(13):95-115. CHU Jinkui, ZOU Yanhuo. Topological Graph Descriptions and Structural Automatic Synthesis of Planar Multiple Joint and Geared-linkage Kinematic Chains[J]. Journal of Mechanical Engineering, 2015, 51(13):95-115. [10] 颜鸿森.机械装置的创造性设计[M].北京:机械工业出版社,2002. YAN Hongsen. The Creative Design of Mechanical Devices [M]. Beijing: Machinery Industry Press, 2002. [11] 王德伦,高媛.机械原理[M].北京:机械工业出版社,2012. WANG Delun, GAO Yuan. Mechanical Principle[M]. Beijing: Machinery Industry Press, 2012. [12] 邹慧君,张青.机械原理课程设计手册[M].北京:高等教育出版社,2010. ZHOU Huijun, ZHANG Qing. Mechanical Principles Course Design Manual[M]. Beijing: Higher Education Press,2010. CreativeDesignofLockCylinderMechanismsBasedonRegenerationMovementChainMethod SONG Mengmeng1XIAO Shungen1,2LIN Shibin1 1.School of information,Mechanical and Electrical Engineering,Ningde Normal University,Ningde,Fujian,352100 2.School of Mechatronic Engineering and Automation,Shanghai University,Shanghai,200072 On the basis of analyses of the existing lock mechanisms, mechanism was restored the regenerative institutions using regeneration movement chain method to identify different kinematic chain mechanisms to meet topology requirements and constraint requirements in order to achieve mechanism innovation of new locks. First, existing Yue Ma idling cylinder body was transformed for corresponding generalized chain by using the principles of generalization; then a prototype kinematic chain was restored using the number synthesis theory in order to find all possible generalized kinematic chain patterns that had the same numbers of components and kinematics; then the movement chain identified the components according to design requirements and constraints , thus a viable specific chain was obtained, and finally the specific chain was transformed into a new organization sketch of lock cylinder. A new 3D model of lock mechanisms was established by using 3D software, and the working principles were analyzed. The results indicate that the lock cylinder mechanisms designed are reasonable, and successfully apply two national invention patents. idling lock cylinder; mechanical regeneration movement chain method; general principle; number synthesis; three-dimensional modeling TH112 10.3969/j.issn.1004-132X.2017.21.015 2016-08-15 福建省自然科学基金资助项目(2015J01643);福建省中青年教师教育科研项目(JA15545);福建省高校杰出青年科研人才培育计划资助资助(闽教科〔2015〕54号) (编辑苏卫国) 宋萌萌,女,1982年生。宁德师范学院信息与机电工程学院讲师。主要研究方向为机械设计和智能控制等。发表论文9篇。E-mail:544824964@qq.com。肖顺根,男,1983年生。宁德师范学院信息与机电工程学院副教授,上海大学机电工程与自动化学院博士研究生。林世斌,男,1993年生。宁德师范学院信息与机电工程学院本科生。
PL1=[1][2][3],PL2=[1][2/3]
PJ1=[e12][e13][e23],PJ2=[e12/e13][e23]
PL1=[1] [2] [3] [4] [5] [6]
PL2=[1] [2] [3] [4] [5/6]
PL3=[1] [2/3] [4] [5] [6]
PL4=[1] [2/3] [4] [5/6]
PJ1= [e14][e15][e16][e24][e25][e26][e34][e35] [e36]
PJ2=[e14][e15/e16][e24][e25/e26][e34] [e35/e36]
PJ3=[e14][e15][e16][e24/e34][e25/e35] [e26/e36]
PJ4=[e14][e15/e16][e24/e34][e25/e36] [e35/e26]

PL1=[1] [2] [3] [4] [5] [6] [7] [8]
PL2=[1] [2] [3] [4/5] [6] [7] [8]
PJ1=[a/d] [b] [c] [e/f] [g] [h] [i] [j] [k]
PJ2=[a] [b] [c] [d] [e] [f] [g] [h] [i] [j] [k]

3 新型锁芯机构的模型构建
4 结论