基于多特征融合和BP-AdaBoost算法的列车关键零件故障自动识别
2017-11-15孙国栋汤汉兵赵大兴
孙国栋 汤汉兵 林 凯 张 杨 赵大兴
1.湖北工业大学机械工程学院,武汉,430068 2.南京大学计算机科学与技术系,南京,210023
基于多特征融合和BP-AdaBoost算法的列车关键零件故障自动识别
孙国栋1汤汉兵1林 凯1张 杨2赵大兴1
1.湖北工业大学机械工程学院,武汉,430068 2.南京大学计算机科学与技术系,南京,210023
针对列车集尘器和安全链锁紧螺栓的故障检测,提出了一种基于多特征融合和BP-AdaBoost的故障自动识别算法。首先提取故障区域与非故障区域的局部二进制模式(LBP)、方向梯度直方图(HOG)和Haar-like三类特征;其次利用主成分分析(PCA)定义不同特征对故障识别准确率的贡献值,并据此对这三种特征进行降维和融合;再次利用融合特征来训练BP-AdaBoost分类器;最后用训练好的分类器结合不同的识别算法,对集尘器和安全链锁紧螺栓的故障进行定位和识别。实验结果表明,该算法能较好地识别两种不同故障,故障识别率高,误检率和漏检率低,对于光照不均和遮挡情况有一定的鲁棒性。
集尘器;安全链锁紧螺栓;特征融合;BP-AdaBoost算法
0 引言
货车运行故障动态图像检测系统(trouble of moving freight car detection system, TFDS)是针对我国复杂铁路运输状况提出的一种列车轨边故障的图像识别与检测系统。它利用高速摄像机采集列车各部位图像,然后结合机器视觉检测技术识别影响列车安全行驶的故障零件。TFDS能有效克服人工检测的局限性,提升故障识别准确率[1-3]。国内很多学者对TFDS图像进行了深入的研究:艾广等[4]利用改进的Hough变换提取车轮特征,并采用基于相似度量实现车轮挡键丢失的识别,该方法能快速定位故障并进行识别;孙国栋等[5]提出利用形状上下文检测挡键丢失故障,该算法本质是模板匹配,方法较新颖但效率较低;邹荣等[6]采用直线段特征形成稀疏表达来描述物体,能有效识别锁紧板的偏转故障,但其算法准确率不高;LI等[7]提出了一种基于图像轮廓的形状描述子和支持向量机(support vector machine, SVM)的方法来检测火车闸瓦插销故障,其算法准确率较高;周富强等[8]通过离散小波变换分析火车制动梁的投影曲线,用以在复杂背景下快速分割制动梁,算法速度快,在复杂背景下表现良好,能为进一步的故障检测提供基础;GUO等[9]利用方向梯度直方图(histogram of oriented gradient,HOG)和SVM对列车锁紧板进行定位,之后用直线段检测(line segment detector,LSD)方法提取锁紧板的线段特征以进行故障识别,其算法定位准确且效率较高;LIU等[10]提出了一种制动梁安全链丢失识别算法,该算法首先利用灰度投影法获得目标区域,然后提取目标区域的梯度方向共生矩阵特征,利用SVM完成故障的识别,该算法的准确率较高。此外,学者们还对钩尾销[11]、制动缸[12]、折角塞门把手[13]、车轮轴承螺栓[14]、闸瓦[15]等列车关键零部件的故障进行了广泛研究。
上述学者提出的识别算法主要针对TFDS中某一特定故障,但TFDS故障种类繁多,在某一类故障上效果良好的算法通常无法适用于另一类故障。本文综合现有的研究结果,提出了一种多特征融合的列车关键零件故障检测算法。
1 算法结构
TFDS中涉及的列车型号较多,车辆底部结构复杂,故障常集中在转向架、制动系统和车体两侧等部位,其中,制动系统及其相关部件的故障检修难度较大,对列车运行安全的危害程度也较大。本文主要针对TFDS制动系统中的集尘器(dust collector, DC)、安全链锁紧螺栓(fastening bolt, FB)这两类关键部件进行分析。TFDS相机采集的各部分图像如图1所示,矩形标记的区域为各目标区域。

(a)DC图像
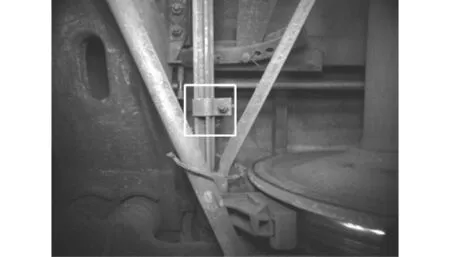
(b)FB图像图1 TFDS采集的集尘器和安全链锁紧螺栓图像Fig.1 DC and FB images captured by TFDS
算法流程主要包括训练过程和识别过程。整个算法结构如图2所示。

图2 算法流程图Fig.2 Flowchart of the algorithm
训练过程中,首先提取正负目标区域样本图片的局部二进制模式(local binary pattern, LBP)、HOG和Haar-like特征,然后结合这些特征来训练AdaBoost分类器。识别过程中,输入的图片为TFDS采集的完整图片,首先设计一个与训练样本大小相同的窗口遍历图片,提取得到各窗口图片的特征;其次,将总特征矩阵输入到已经训练好的分类器中,可以得到目标区域特征矩阵在总特征矩阵的位置;再次,根据特征矩阵和图片的对应关系可得到目标区域的位置,从而完成定位;最后,进一步根据不同故障选取不同识别算法完成识别。
2 训练过程
2.1特征提取
2.1.1 LBP特征提取
LBP最早是由OJALA等[16]在1996年提出的,是一种图像局部纹理的特征描述子,其分类能力强,简单有效,被广泛用于人脸识别和纹理分类。
原始LBP算子定义在一中心像素及其周围的3×3的邻域内,以中心像素的灰度值为阈值与8个相邻像素的灰度值进行对比,灰度值高于此值标记为1,否则标记为0。处理之后,3×3的邻域内就会得到8位二进制数,对这8位二进制数进行十进制的编码可得到一个十进制数,该数值即中心点像素的LBP值。根据编码顺序不同,同一像素点会得到不同的LBP值。TFDS图像中的原始LBP算子计算原理如图3所示。

图3 原始LBP算子Fig.3 The original LBP operator
这种定义在3×3的邻域内的原始LBP存在很大的缺陷。首先,3×3的邻域过于局部,无法在大尺度上描述图像的纹理特征;其次,正方形的邻域不具有旋转不变性。故OJALA等[17]在原始的LBP基础上提出了改进的LBP算子,将正方形邻域用圆形邻域代替,改进后LBP可以设定任意的邻域半径R和相邻像素个数N。
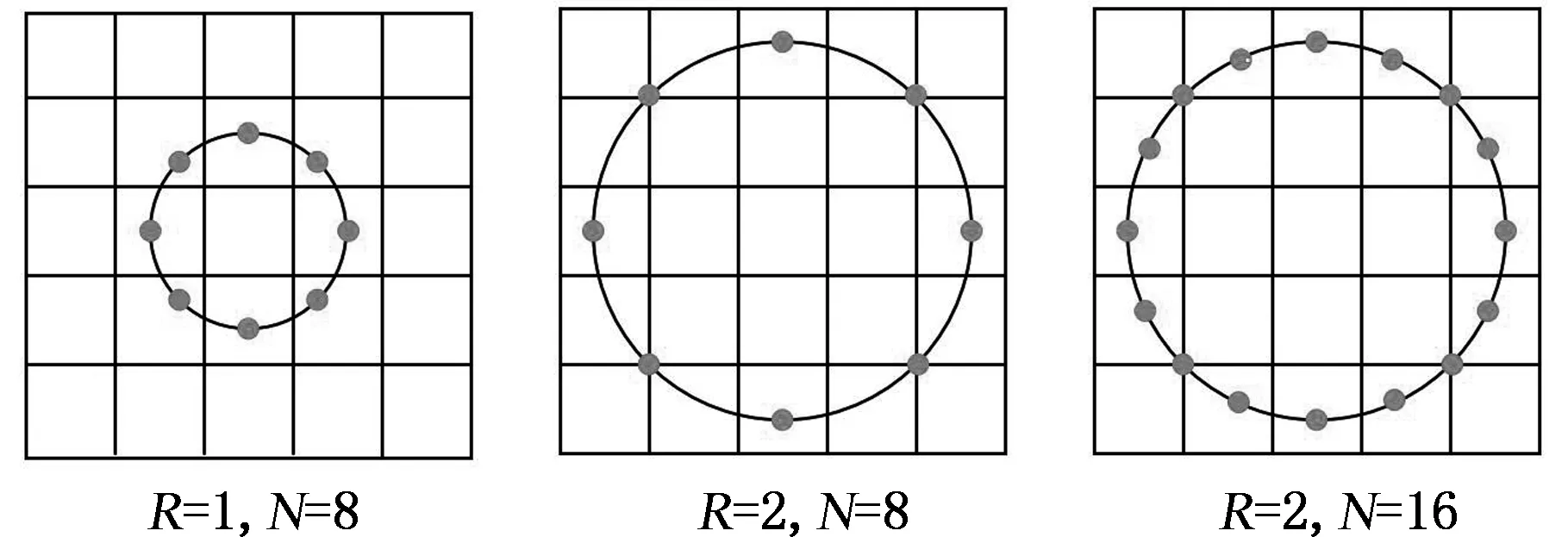
图4 圆形LBP算子Fig.4 Circular LBP operator
从定义可知LBP算子具有灰度不变性,为实现旋转不变性,OJALA等[17]在前述研究基础上继续提出了旋转不变LBP算子。当图片旋转时,周围像素的编码会发生改变,此时会得到不同的LBP值,从而大大增加了特征的维数。图5描述了R=1、N=8时旋转不变LBP模型的原理,首先将圆形邻域以45°为间隔旋转8次,然后比较8个不同编码顺序的LBP值,取其中的最小值作为此处的LBP值,图5中8种位置的LBP值均为15。
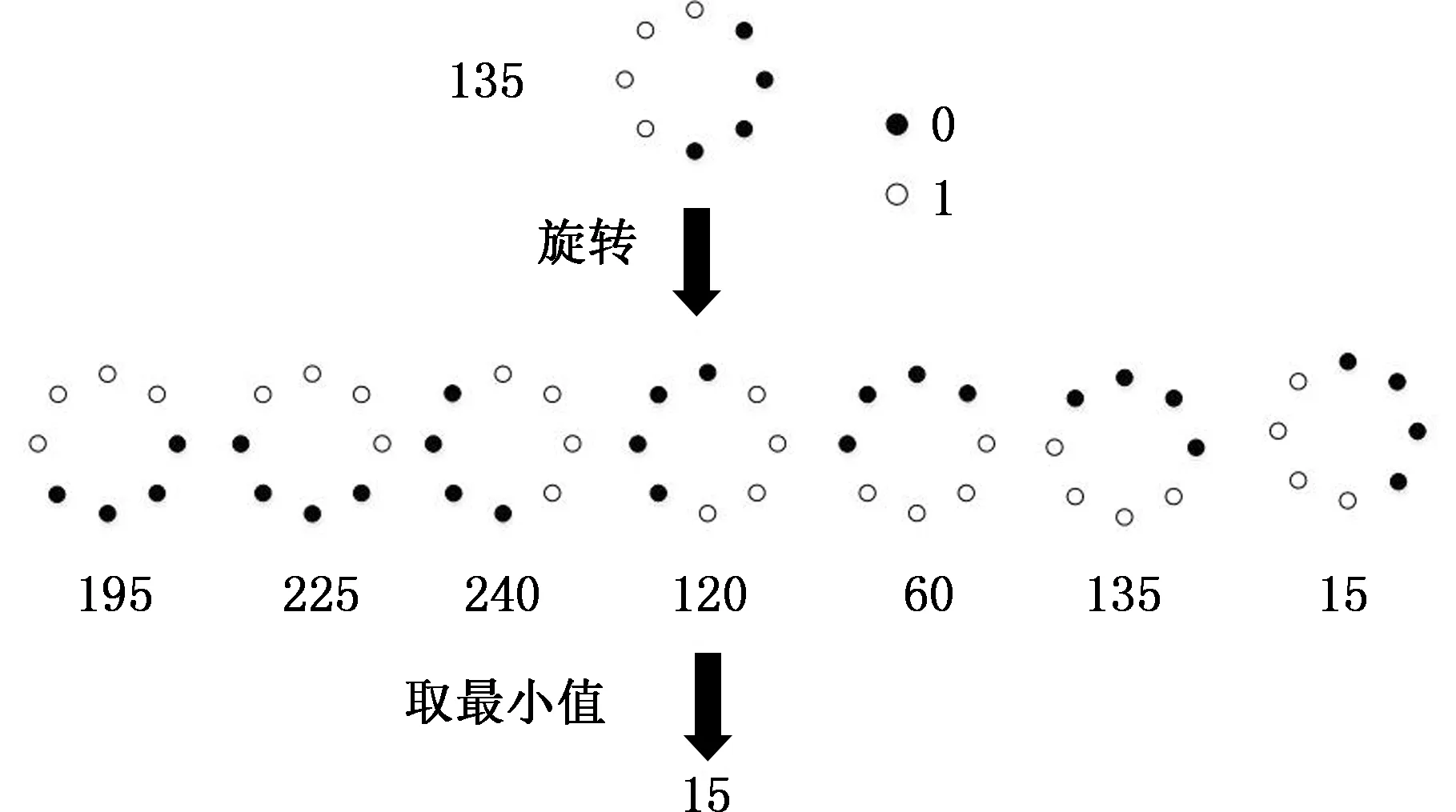
图5 旋转不变性LBP算子Fig.5 Rotational invariance LBP operator
旋转不变LBP算子大大降低了特征矩阵的维数,能有效提升算法效率,故本文选用旋转不变LBP算子riLBP。提取图像riLBP(算法1)特征步骤如下:
(1)输入。原图像I,子区域大小D×D,相邻像素数N。
(2)读取图像I,将图像划分为若干个大小为D×D的子区域。
(3)对每个子区域中的像素点,将其像素值与相邻的N个像素的灰度值进行比较,按上述规则即可得到此处的LBP值。
(4)计算得到每个子区域的频率直方图,即每个子区域中每个LBP值出现的频率,并进行归一化。
(5)将每个子区域的频率直方图串联连接成一个向量,即整幅图像的LBP特征向量。
(6)输出riLBP特征向量。
由于不同库样本图片大小不同,故提取不同库中riLBP特征时,参数设计也不同,具体见表1。

表1 不同库LBP参数Tab.1 LBP parameters in different libraries
2.1.2 HOG特征提取
HOG是图片中某个区域灰度梯度方向的统计直方图,用来描述图像的一种特征描述子,能对图像的边缘信息和形状信息进行很好的描述,最初由DALAL等[18]应用于行人检测,之后被广泛应用于人脸检测和目标识别。本文提取图像HOG特征(算法2)的步骤如下:
(1) 输入原图像I,梯度方向个数M,Cell大小C×C,Block大小B×B。
(2) 读取图像I,将灰度图像进行Gamma校正,以调节图像的对比度,降低光照变化和噪声对图像的影响。
(3) 将图像划分为若干个Cell,以Cell为单位计算其M个方向的梯度直方图。
(4) 将每个Block中所有Cell的方向梯度直方图整合到一个行向量中,然后将所有Block的向量串联连接,得到该图像的HOG描述子。
(5) 输出HOG特征向量。
由于不同库样本图片大小不同,故提取不同库中HOG特征参数设置如下:方向个数M均取9,B值均取2,DC和FB中Cell的大小分别取36×36和40×40。
2.1.3 Haar-like特征提取
Haar-like特征被广泛应用于人脸识别[19-20],根据模板形式的不同可分为4类:边缘特征、线性特征、中心特征和对角线特征。如图6所示。每种特征模板均由黑白两种矩形组成,定义模板的特征值为模板内黑色像素灰度值之和减去白色像素灰度值之和。由于这种方法计算复杂且特征维数高,所以Haar-like特征的计算多采用积分图法。
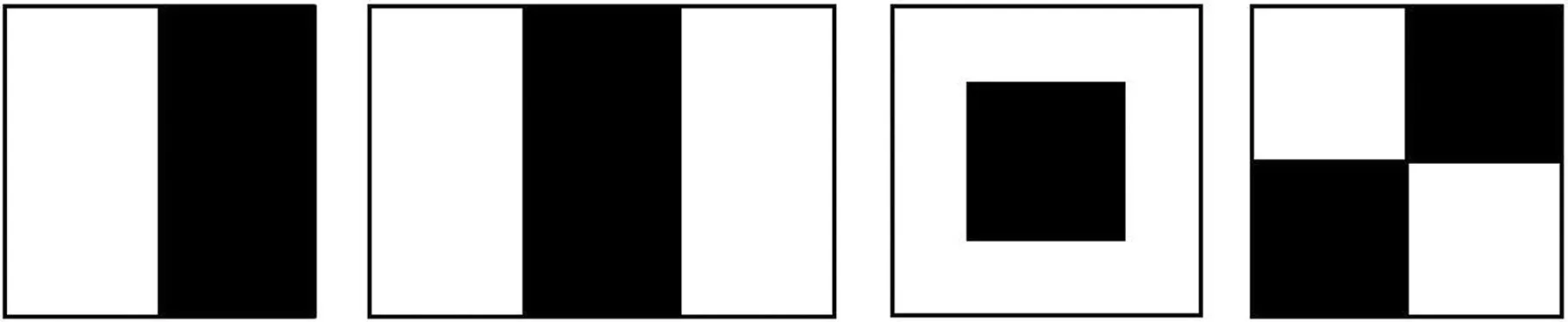
A B C D图6 Haar-like四类模板Fig.6 Four types of Haar-like templates
Haar-like特征能准确反映图像灰度的变化情况,能较好地描述图像局部的边缘和线段信息。LBP和HOG特征描述本文所述列车故障区域效果并不理想,因此,提取Haar-like特征作为上述两种特征的补充。
2.2特征降维融合
2.1节中3种特征在单独应用于TFDS故障图片识别时效果并不理想,为了进一步提高识别率,使3种特征的优势互补,考虑将这3种特征进行融合。由于这3种特征维数都较大,直接进行简单拼接会造成“维数灾难”,同时,直接融合后的特征维数过高,输入AdaBoost分类器中训练耗时较长,效率低,故考虑将特征进行降维处理。
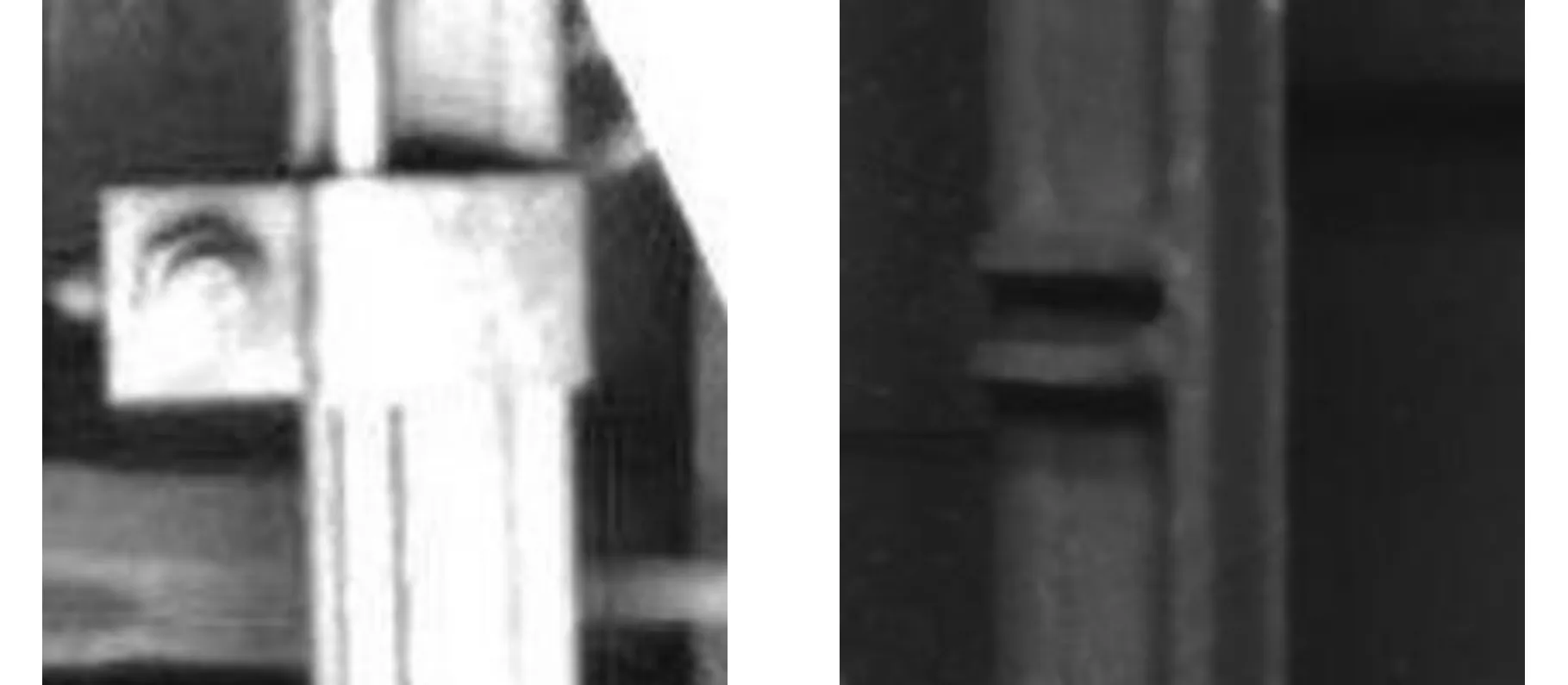
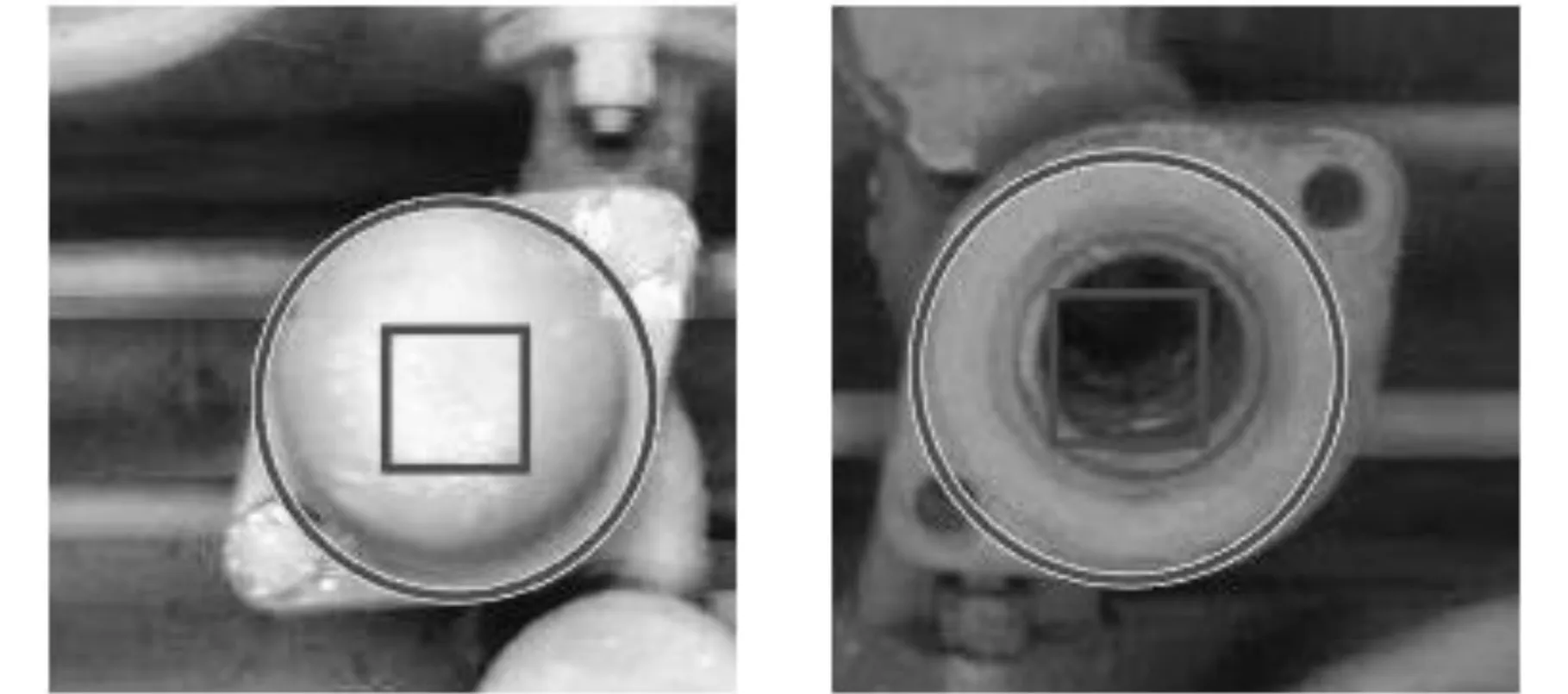
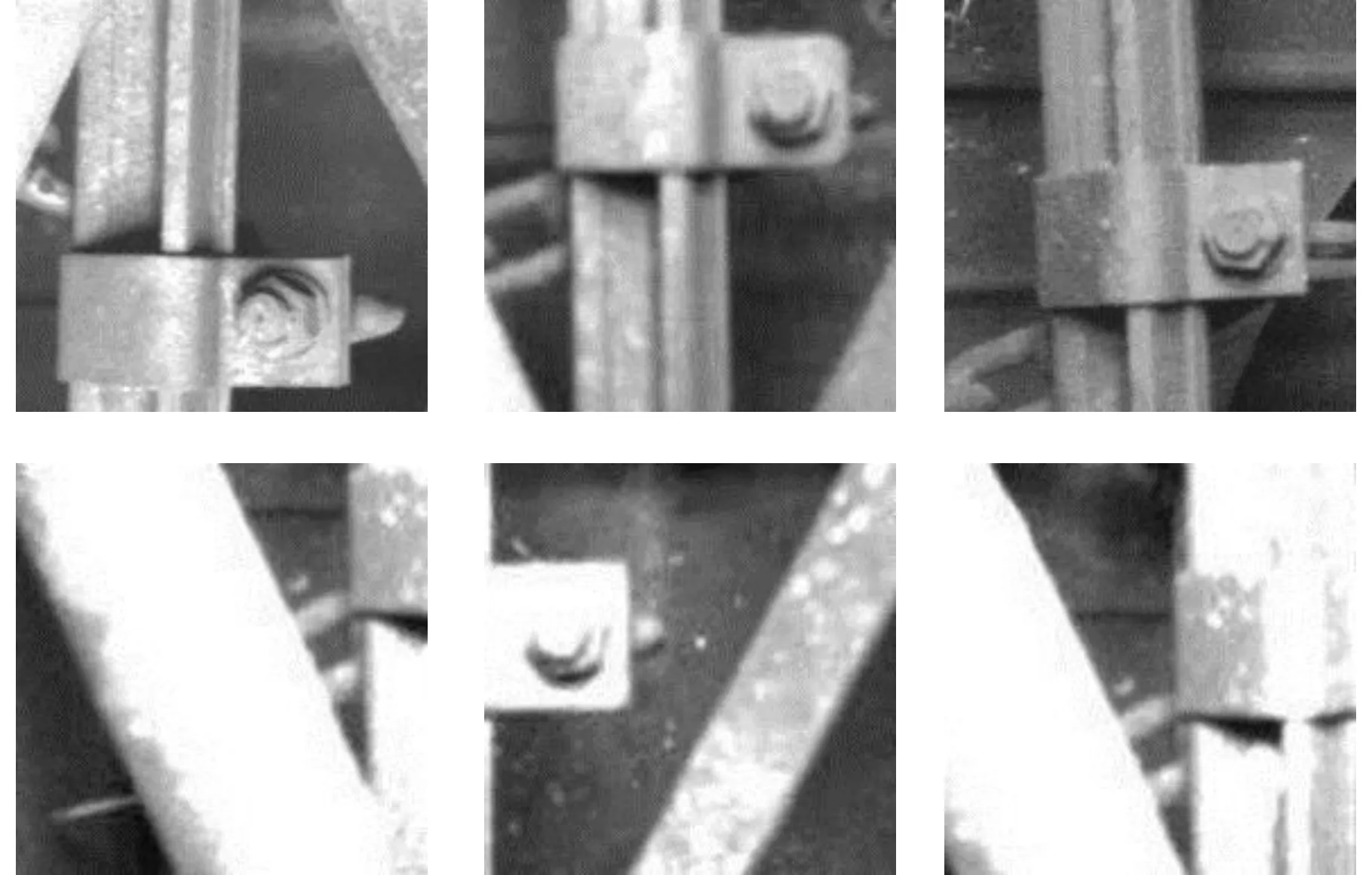
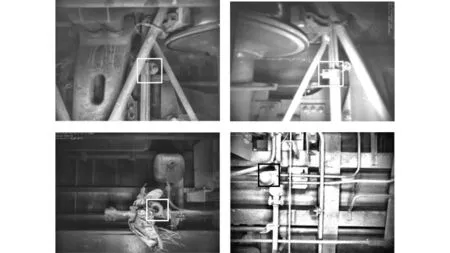
主成分分析法(principal component analysis,PCA)是一种被广泛应用的降维方法。其原理是计算给定的特征矩阵F(矩阵大小为X×Y,X为样本数,Y为特征维数)的协方差矩阵C,然后计算C的特征值和特征向量,按特征值大小将对应的特征向量排序组成一个新的矩阵,此时降维方法有两种:①直接选取新矩阵的前P列(P 图7 贡献值与准确率关系Fig.7 The relationship between the contribution value and the accuracy rate 从图7可以看出,随着贡献值的提升,在一定范围内准确率会提升,当所取贡献值在0.90以上时,准确率提升并不大,有时甚至会下降,并且由于贡献率的提高,特征矩阵维数也会随之上升,算法效率将会受到影响,故根据实验结果综合考虑算法效率和准确率,取贡献值为0.90。 2.3分类器训练 将2.1节中所述的三种特征riLBP、HOG和Haar-like,经过2.2节所述的降维融合操作后得到特征矩阵,并将特征矩阵输入基于AdaBoost的BP分类算法(BP-AdaBoost[21])中进行训练。AdaBoost算法的思想是对给定的特征集通过训练一定数量的弱分类器组成一个强分类器,而在BP-AdaBoost中弱分类器即BP神经网络,具体步骤如下:首先对各弱分类器设定一个初始权值,然后根据各弱分类器对特征集的误差更新权值,误差大的分类器的权值提高,误差小的分类器的权值降低,循环多次后将最后得到的权值和对应的弱分类器组合起来,得到强分类器。 BP-AdaBoost算法由20个BP神经网络组成,每个BP神经网络为一个弱分类器,20个BP网络组成一个强分类器。 识别过程输入为TFDS实际采集得到的列车图片,包括设定窗口遍历、提取特征融合、应用BP-AdaBoost进行定位和识别4个步骤。 3.1安全链锁紧螺栓识别 安全链由锁紧螺栓固定于列车制动梁上,是货车上用来连接各重要零件的一个零件,安全链丢失会导致列车结构出现问题而发生事故。对于安全链故障,其正常和故障样本图片如图8所示,观察可知两者结构差别较大,考虑到算法简洁性,采用正常判别模式来进行故障识别,即在用无故障的样本图片进行匹配定位时,对于正常图片,若定位到正常零件即视为判断正确;而对于故障图片,若定位偏离正常零件位置则视为判断正确。这种模式无需额外设计识别算法,在定位的同时即可完成识别。 (a)正常图片 (b)故障图片图8 FB正常与故障图片Fig.8 Normal image and fault image of FB 3.2集尘器识别过程 集尘器位于列车底部,用于防止粉尘进入制动管内,进而影响列车制动。对于集尘器故障,其正常样本和故障样本如图9所示,与安全链不同,集尘器两者结构相似,无法用正常识别模式,故需设计识别算法。 (a)正常图片 (b)故障图片图9 DC正常与故障图片Fig.9 Normal image and fault image of DC 对比集尘器正常和故障图片可知,集尘器发生故障时中心位置存在一个孔,显示在灰度图中,即此中心处的灰度值明显低于正常时的灰度值,故考虑以此孔位置处的灰度值作为判据来判断零件故障与否。观察可知,正常零件和故障零件在相同位置均存在圆形轮廓,为了定位得到中心孔洞位置,可先提取图中零件的圆形轮廓,其圆心位置即可视为孔洞中心位置。 算法原理示意图如图10所示,具体算法流程如下。 图10 算法原理示意图Fig.10 Schematic diagram of the algorithm (1)定位得到目标区域子图像; (2)提取子图像圆形轮廓,得到圆心坐标与半径R; (3)以圆心为中心、R/2为边长作一正方形,统计正方形内像素的灰度值低于90的像素点数量Np,考虑到光照和噪声的影响,设定当Np>50为故障,反之则为正常。 实验环境如下:Windows 7(64位)操作系统,Intel(R) Xeon(R) CPU E5-2640 v4 @2.40GHz和64GB的RAM,MATLAB R2015b软件。实验基于DC、FB两个库进行。 4.1定位算法测试实验 每类故障数据库分别有正负两组样本库,正样本中包含不同位置、不同角度和不同光照下的目标区域的图像,负样本则为不含目标区域的其他位置的图像,部分样本如图11和图12所示。各数据库定位实验训练图片样本数量及测试样本数量见表2。 图11 DC正负样本库部分样本Fig.11 positive and negative samples of DC 图12 FB正负样本库部分样本Fig.12 positive and negative samples of FB 库图片总数样本数(正/负)测试用样本数(正/负)DC1123610000/12361236/1236FB1360010000/36003600/3600 分别提取正负样本的LBP、HOG和Haar-like特征,将各单独特征与本文提出的融合特征FH输入到BP-AdaBoost分类器进行对比实验。实验结果见表3。 表3各对比实验结果 实验序号特征+分类器准确率(%)DCFB1HOG+BP-AdaBoost98.3998.102LBP+BP-AdaBoost95.5593.713LBP+HOG+BP-AdaBoost99.5598.714FH+BP-AdaBoost99.8499.155FH+SVM94.5494.20 由表3可知,单独选取HOG作为特征时,DC、FB两个数据库上的分类准确率在98%左右。单独选取LBP作为特征时,在DC样本库的分类准确率为95.5%,而在FB库的准确率仅有93.71%。当选取LBP+HOG为特征时,FB和DC的准确率分别为98.71%和99.55%,相比各单独特征有较大提升。以混合特征FH作为特征输入时,FB库上准确率达到99.15%,在DC库的准确率更是达到99.84%,准确率进一步提升。综上所述,混合特征相比各单独特征能更有效提升分类的准确率。 为了验证BP-AdaBoost分类算法的有效性,基于混合特征FH设计了以SVM为分类算法的对比实验,由表3中实验结果可知,当以SVM为分类器时,DC和FB的分类准确率分别为94.54%和94.20%,相比BP-AdaBoost算法的准确率效果较差。 4.2完整图像实验 将TFDS获取的完整图像作为输入检验本文算法的故障检测效果。测试数据库图片组成见表4,检测结果见表5。 表4 测试数据库图片组成Tab.4 Image composition of the test library 表5 识别结果Tab.5 Inspection results 观察表5可知,算法对两种故障有较好的检测效果,检出率高,误检率(误检数/总样本数)和漏检率(漏检数/总样本数)[22]低。部分检测结果如图13所示。从图13可以看出,对于存在遮挡和光照不均的情况,本文识别算法仍能作出有效识别,证明本文算法具有一定鲁棒性。由于货车经过TFDS时车速较慢,而算法对两类故障图片平均识别时间分别为41 s和68 s,可以满足实时检测要求。 图13 部分检测结果Fig.13 Part of inspection results 实验结果表明,本文提出的算法能实现DC和FB两种不同故障的识别,DC和FB检出率分别高达96.3%和97.3%,DC库漏检率和误检率分别为1.2%和2.5%,FB库漏检率和误检率分别为0.8%和1.9%。该方法识别准确率高,漏检率和误检率低,对于光照不均和遮挡情况,本文识别算法仍然有效,有一定的鲁棒性。考虑到机器学习算法复杂度较高,今后将研究改善算法以提升检测效率。 [1] 刘瑞扬. 货车运行故障动态图像检测系统(TFDS)的原理与应用[J]. 中国铁路,2005(5):26-37. LIU Ruiyang. Principle and Application of Trouble of Moving Freight Car Detection System (TFDS)[J]. Chinese Railways,2005(5):26-37. [2] 孙国栋, 杨林杰, 梅术正, 等. 一种基于几何特征的列车集尘器形状匹配算法[J]. 中国机械工程,2016,27(2):230-234. SUN Guodong, YANG Linjie, MEI Shuzheng, et al. A Shape Matching Method for Train Collector Based on Geometrical Features[J]. China Mechanical Enginnering,2016,27(2):230-234. [3] 赵大兴, 王博, 周唯倜, 等. 基于有向线段重构轮廓与成对几何直方图的缓解阀盖图像匹配算法[J]. 中国机械工程,2017,28(6):721-727. ZHAO Daxing, WANG Bo, ZHOU Weiti, et al. Image Matching Algorithm of Release Valve Bonnet Based on Contours Reconstructed by Oriented Line Segment and Pairwise Geometrical Histogram[J]. China Mechanical Engineering,2017,28(6):721-727. [4] 艾广, 张金敏, 王思明, 等. 基于Hough变换的挡键丢失故障识别方法[J]. 微电子学与计算机,2017,34(3):90-94. AI Guang, ZHANG Jinmin, WANG Siming, et al. Fault Recognition Method for Bogie Block Key Losing Based on Hough Transform[J]. Microelectronics and Computer,2017,34(3):90- 94. [5] 孙国栋, 徐威, 梁永强, 等. 基于形状上下文的列车挡键丢失图像识别算法[J]. 铁道科学与工程学报,2014,11(6):127-131. SUN Guodong, XU Wei, LIANG Yongqiang, et al. Image Recognition Algorithm for Side Frame Key of Train Based on Shape Context[J]. Journal of Railway Science and Engineering,2014,11(6):127-131. [6] 邹荣, 李健康, 徐家祥, 等. 复杂场景下铁路货车锁紧板偏转故障检测[J]. 铁道科学与工程学报,2015,12(4):917-922. ZOU Rong, LI Jiankang, XU Jiaxiang, et al. Deflectionfault Detection for Locking Plate of Freight Trains under Complex Scene[J]. Journal of Railway Science and Engineering,2015,12(4):917-922. [7] LI Nan, WEI Zhenzhong, CAO Zhipeng. Automatic Fault Recognition for Brake-shoe-key Losing of Freight Train[J]. Optik-International Journal for Light and Electron Optics,2015,126(23):4735-4742. [8] 周富强, 郭卉. 复杂背景下货车制动梁的快速分割方法[J]. 光学技术,2013,39(5):387-392. ZHOU Fuqiang, GUO Hui. Fast Segmentation Method for Brake Beam of Freight Train under Complex Background[J]. Optical Technique,2013,39(5):387-392. [9] GUO N, YAO J E. A Real-time Visual Inspection Method of Fastening Bolts in Freight Car Operation[J]. Applied Optics and Photonics China,2015,9675:96752G. [10] LIU L, ZHOU F, HE Y. Automated Status Inspection of Fastening Bolts on Freight Trains Using a Machine Vision Approach[J]. Proceedings of the Institution of Mechanical Engineers Part F: Journal of Rail and Rapid Transit,2016,230(7):1159-1166. [11] ZHENG C, WEI Z. Automatic Online Vision-based Inspection System of Coupler Yoke for Freight Trains[J]. Journal of Electronic Imaging,2016,25(6):061602. [12] CAO Y, ZHANG B, LIU J, et al. Weighted Margin Sparse Embedded Classifier for Brake Cylinder Detection[J]. Neurocomputing,2013,120(10):560-568. [13] ZHOU F, ZOU R, QIU Y, et al. Automated Visual Inspection of Angle Cocks during Train Operation[J].Proceedings of the Institution of Mechanical Engineers Part F: Journal of Rail and Rapid Transit,2013,228(7):794-806. [14] LI C, WEI Z, XING J. Online Inspection System for the Automatic Detection of Bolt Defects on a Freight Train[J]. Proceedings of the Institution of Mechanical Engineers Part F: Journal of Rail and Rapid Transit,2016,230(4):271-288. [15] LU S, LIU Z, NAN G, et al. Automated Visual Inspection of Brake Shoe Wear[J]. Applied Optics and Photonics China,2015:96752F. [16] OJALA T, HARWOOD I. A Comparative Study of Texture Measures with Classification Based on Feature Distributions[J]. Pattern Recognition,1996,29(1):51-59. [17] OJALA T, PIETIKINEN M. Multiresolution Gray Scale and Rotation Invariant Texture Classification with Local Binary Patterns[J]. IEEE Trans. Pattern Analysis and Machine Intelligence,2002,24(7):971-987. [18] DALAL N, TRIGGS B. Histograms of Oriented Gradients for Human Detection[J]. IEEE Conference on Computer Vision and Pattern Recognition,2005,1(12):886-893. [19] 王庆伟, 应自炉. 一种基于 Haar-like T 特征的人脸检测算法[J]. 模式识别与人工智能,2015,28(1):35-41. WANG Qingwei, YING Zilu. A Face Detection Algorithm Based on Haar-like T Features[J]. Pattern Recognition and Artificial Intelligence,2015,28(1):35-41. [20] 段晓东, 王存睿, 李志洁, 等. 基于Haarlike的人脸民族特征分析[J]. 微电子学与计算机,2011,28(7):17-20. DUAN Xiaodong, WANG Cunrui, LI Zhijie, et al. The Ethnic Facial Research Based on Haarlike Features[J]. Microelectronics and Computer,2011,28(7):17-20. [21] FREUND Y. Experiments with a New Boosting Algorithm[J].Proceedings of Thirteenth International Conference on Machine Learning,1996,13:148-156. [22] 张杨. 基于改进马尔科夫随机场与精确高度函数的列车故障图像层次特征匹配[D]. 武汉: 湖北工业大学,2017. ZHANG Yang. Hierarchical Feature Matching of the Fault Image Based Improved Markov Random Field and Exact Height Function in TFDS[D].Wuhan: Hubei University of Technology,2017. AutomaticFaultRecognitionforKeyPartsofTrainBasedonMulti-featureFusionandBP-AdaBoostAlgorithm SUN Guodong1TANG Hanbing1LIN Kai1ZHANG Yang2ZHAO Daxing1 1.School of Mechanical Engineering, Hubei University of Technology, Wuhan, 430068 2.Department of Computer Science, Nanjing University, Nanjing, 210023 An automatic fault recognition method was proposed for the fault detection of the fastening bolts and dust collectors based on multi-feature fusion and BP-AdaBoost algorithm. Firstly, the local binary pattern (LBP), histogram of oriented gradient (HOG) and Haar-like features of the faulty and non-faulty areas were extracted. Then, the principal component analysis (PCA) was used to define the contribution of different features to the fault recognition accuracy, the three features metioned above were fused, and the dimensionality reduction was conducted to the fusion feature. Then the BP-AdaBoost classifier was trained by the fusion features. Finally, the trained classifier and the recognition algorithm were used to detect the dust collector and fastening bolt faults. The experimental results show that the algorithm may adapt to the recognition of two different faults. High recognition accuracy rate, low false ratios and low omission ratios are obtained, and the algorithm is robust to light unevenness and occlusion. dust collector; fastening bolt; feature fusion; BP-AdaBoost algorithm TP29 10.3969/j.issn.1004-132X.2017.21.013 2017-06-19 国家自然科学基金资助项目(51775177,51205115) (编辑陈勇) 孙国栋,男,1981年生。湖北工业大学机械工程学院教授、博士。研究方向为计算机视觉和机器学习。E-mail: sgdeagle@163.com。汤汉兵,男,1995年生。湖北工业大学机械工程学院硕士研究生。林凯,男,1993年生。湖北工业大学机械工程学院硕士研究生。张杨,男,1992年生。南京大学计算机科学与技术系博士研究生。赵大兴,男,1962年生。湖北工业大学机械工程学院教授、博士。
3 识别过程

4 实验结果及分析


Tab.3Resultsofthecomparisonexperiments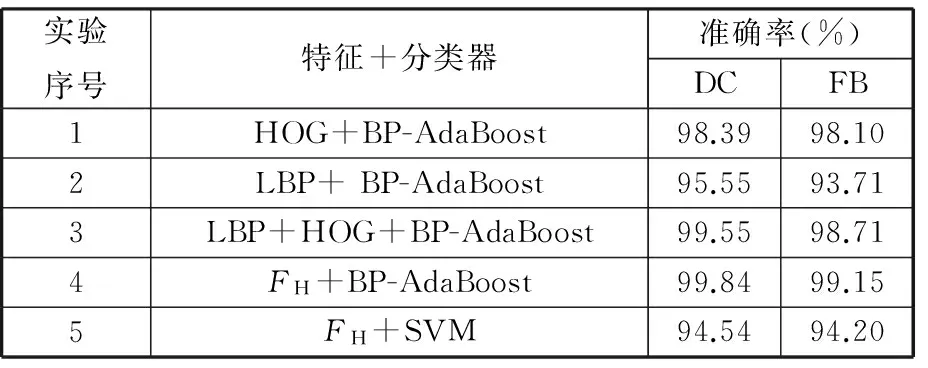


5 结语