垂直圆盘管道刮板输送机EDEM仿真研究
2017-11-10池优阳阮竞兰
池优阳,阮竞兰
(河南工业大学 机电工程学院,河南 郑州 450001)
垂直圆盘管道刮板输送机EDEM仿真研究
池优阳,阮竞兰
(河南工业大学 机电工程学院,河南 郑州 450001)
针对国内少有的垂直圆盘管道刮板输送机进行了Solidworks仿真模型的建立,基于离散元仿真软件EDEM模拟了大豆颗粒在输送过程中的宏观运动情况;通过改变传动轮转速,使用控制变量法获得了颗粒物料抛出的最佳速度;经过数据的后处理分析获取了大豆颗粒在输送机内的运行情况,主要包括:颗粒运行轨迹的绘制以观察颗粒碰撞情况;颗粒在各轴向上的速度以分析颗粒运行稳定性;颗粒输送过程中的受力以防止颗粒受力过大而破碎。这些为圆盘管道刮板输送机的仿真研究提供了数据基础。
垂直圆盘管道刮板输送机;离散元;EDEM;大豆颗粒模型
0 引言
在当今各行业的生产过程中,连续输送机械有着非常重要的作用,连续输送机种类很多,但都存在着一定的不足,例如:气力输送设备,输送过程中动力消耗大,输送管道易堵塞;螺旋输送机,物料易破碎,螺旋叶片及料槽磨损严重;斗式提升机,易产生粉尘爆炸,料斗带易打滑、跑偏和撕裂,并且回料过多[1]。
圆盘管道刮板输送机,是由钢丝绳牵引,带动铆接于其上的圆形刮板推动物料运动,并且在运转过程中管道内形成负压,这样周围空气进入和物料混合,使物料流态化更有利于输送[2]。此种输送机可根据预先设定的线路,将物料从加料点输送至卸料点,可以实现水平输送、垂直输送及倾斜输送,如图1所示。可输送物料的范围非常广,如粉状、颗粒状、低强度块状以及小型成品件物料都可以被输送。与传统连续输送机相比,具有能耗低以及空间任意布置输送线路等优点。
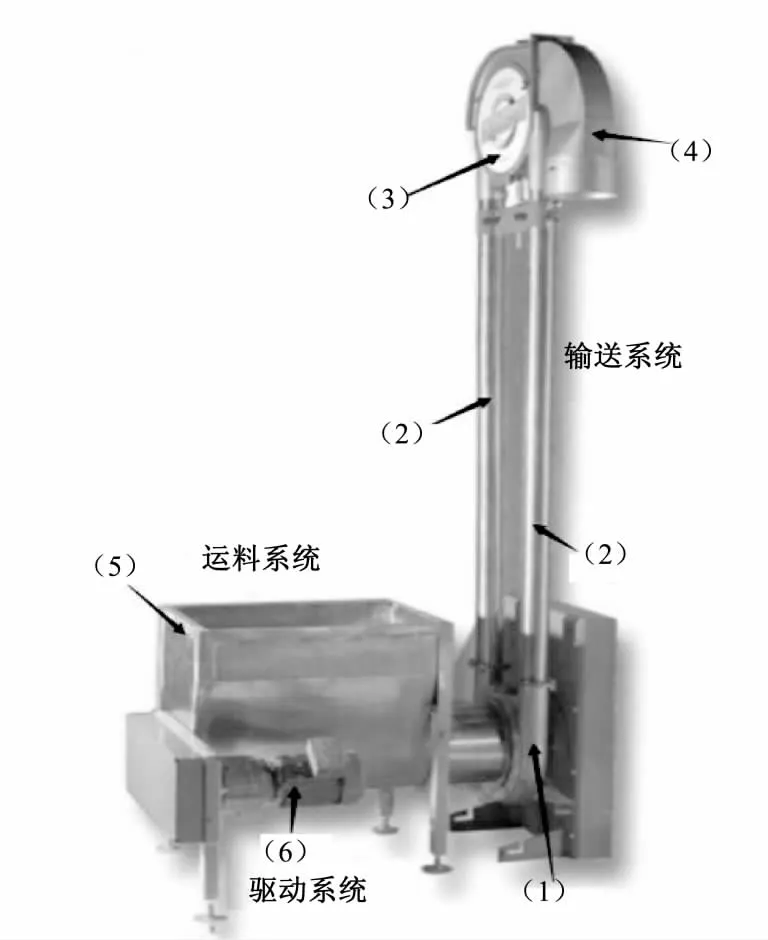
图1 圆盘管道刮板输送机Fig.1 Disc tube scraper conveyor
对于此种刮板输送机的研究还不是很多,有少数文献虽然也对输送机进行了计算机仿真,但多数对模型进行了大量的简化,并且大多只进行了水平输送方式的研究,对于垂直输送和倾斜输送方式的研究文献不多。为了丰富对于此种输送机的研究,以获取多种输送方式下物料的运行情况,作者借鉴已有文献中使用离散元软件EDEM的仿真方法,以颗粒物料为研究对象选取垂直输送方式来进行计算机模拟仿真,利用离散单元法可把研究对象看成充分多的离散单元,根据仿真全过程中每一时刻各颗粒间的相互作用反复迭算,最终获得物料在垂直输送方式下的运行参数。
离散单元法(Discrete Element Method,DEM)是美国Cundall P.A.教授在1971年基于分子动力学原理提出的一种颗粒离散体物料分析方法。离散单元法经过近半个世纪的发展,分析原理和计算方法已经日趋成熟,新型三维离散元软件(Engineering Discrete Element Method,EDEM)是世界上第一个用现代化离散元模型设计的用以模拟和分析颗粒单元运动规律的CAE软件[3]。
基于EDEM软件的可视化特点,通过此软件能够更加直观、便捷地得到输送机的运行情况,并通过添加颗粒物料来仿真输送机的输送过程,经过EDEM的后处理模块来进行颗粒物料的运行参数分析,为模型的优化提供数据支持。
1 输送机仿真模型建立
利用三维建模软件Solidworks进行圆盘管道刮板输送机模型的建立如图2所示。但是由于EDEM仿真过程中,复杂的模型会造成仿真时长的延长,所以在导入到EDEM软件之前要对模型进行尽可能的简化。模型的简化是将螺栓、轴承、键等标准零件去除,这样可以减少仿真利用的时间。简化模型如图3所示。

图2 圆盘管道刮板输送机完整模型Fig.2 Complete model of disc tube scraper conveyor
2 EDEM前处理参数设置
2.1 全局模型参数
EDEM仿真中首先要确定颗粒的接触模型,常用的颗粒接触模型有Hertz-Mindless无滑动接触模型、黏结接触模型、运动平面接触模型、线弹性接触模型等。颗粒与颗粒之间、颗粒与壁面之间的法向受力和切向受力,可以采用利用两物体之间的相对位置与它们各自受力处的曲率半径进行对比的方法得到,而颗粒接触模型中Hertz-Mindless无滑动接触模型正是利用了这一原理,并且能够较好地反映硬质刚性物体间的力学行为特点,所以这里接触模型为Hertz-Mindless无滑动接触模型[4]。
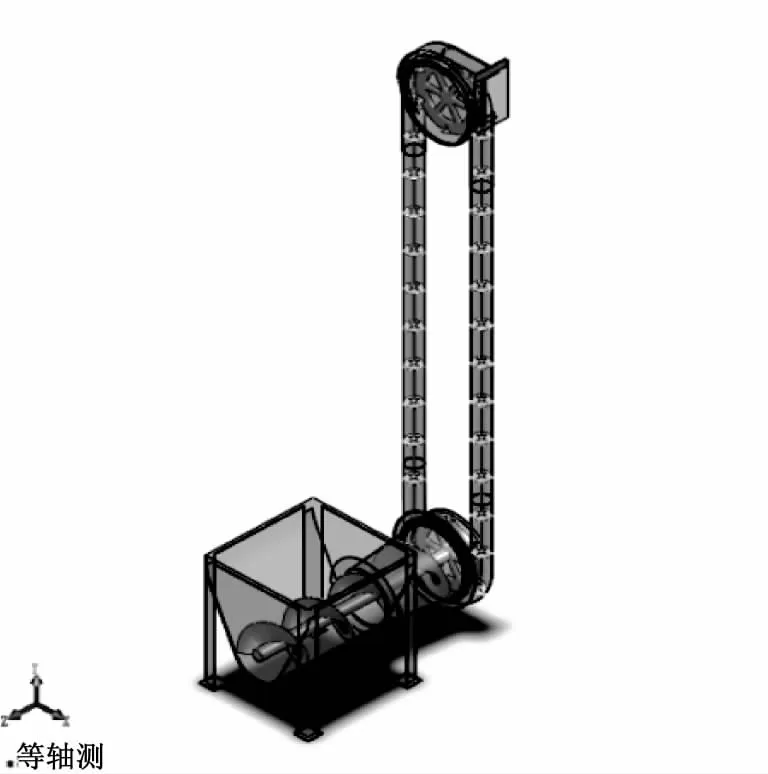
图3 圆盘管道刮板输送机简化模型Fig.3 Simplified model of disc tube scraper conveyor
材料属性的设定对仿真结果的正确性有着至关重要的影响,这里选取生产中常见的大豆作为研究对象,因为大豆颗粒建模相对简单且生产中易于获取。经过理论计算和查阅资料获得了大豆颗粒和模型零部件材料的属性参数以及相互作用参数[5],如表1和表2所示。
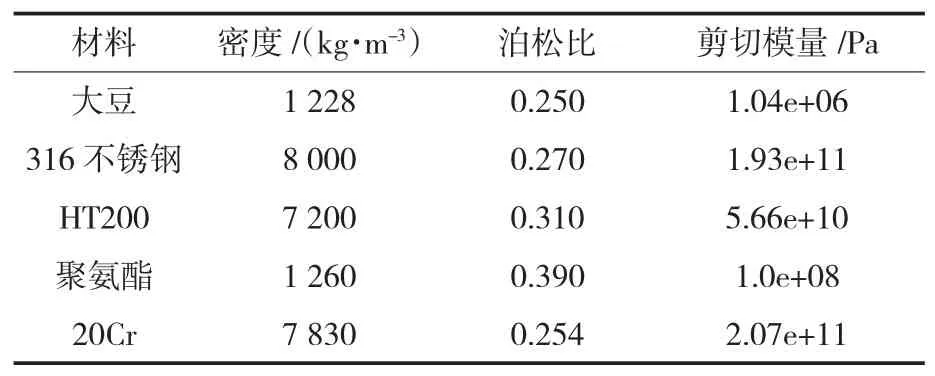
表1 材料属性Table 1 Materials properties
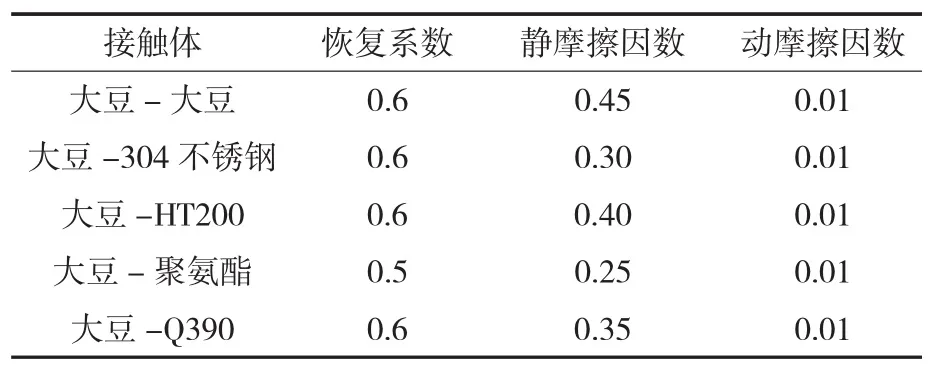
表2 接触属性Table 2 Contact properties
2.2 大豆颗粒建模
仿真颗粒模型越接近真实情况就越能反映颗粒在圆盘管道刮板输送机中的真实运行情况,利用EDEM中的四面构型法来创建大豆模型,如图4所示,大豆的其他属性经EDEM可以自动获取,如表 3所示[5]。
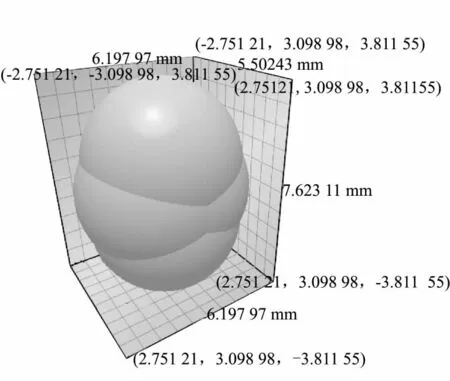
图4 大豆颗粒模型Fig.4 Soybean particle model

表3 大豆颗粒属性Table 3 Soybean particle properties
2.3 定义几何体
2.3.1 导入几何体
将Solidworks中简化的模型另存为IGS格式导入到EDEM中,其中坐标系如图5所示,螺旋喂料器沿Z轴反方向输送,刮板垂直输送沿Y轴正方向输送,颗粒抛出沿X轴正方向抛出,黑色方格区域为计算域。
2.3.2 定义模型运动
模型的运动包括螺旋喂料器的运动和刮板的运动。螺旋喂料器绕定轴进行旋转运动,添加Liner Rotation运动;刮板的运动既包括圆弧段运动又包括直线段运动,需要连续添加Liner Rotation和Liner Translation运动。螺旋喂料器的输送量由下面计算公式可求[6]:

图5 圆盘管道刮板输送机EDEM仿真模型Fig.5 EDEM simulation model of disc tube scraper conveyor

式中:D为螺旋叶片直径(0.35 m);φ为物料装满系数;s为螺距(0.28 m);n为螺旋轴转速(r/min);C为倾斜输送修正系数,螺旋喂料器水平放置取1;K为螺旋叶片的影响系数,取1。
在垂直输送段,圆形刮板和圆形管道构成了工作空间,在工作过程中,由于受到工况的限制,所以工作空间有一定的使用效率,设容积效率为ηV,根据经验刮板面积 S(S=π·R2,其中 R=0.2)和刮板线速度v(m/s)的乘积即可视为刮板输送的体积输送量,这里可以根据单位的变化进行验证:m2·m/s=m3/s,即每秒输送的物料体积,再设物料的容重为γ(t/m3),可得到输送机的质量输送量Q刮为:

物料从料仓螺旋喂料器输送至刮板,通过传动轮的运动带动刮板使物料运动,然后通过离心力的作用将颗粒甩出,完成颗粒的输送任务。这里涉及的一个关键点即为刮板运行速度和螺旋喂料器转速必须取合适的值以完成相同的输送量,即:

将已知参数代入式(2)得:

式中:n轮为传动轮的转速。
由式(3)可知,首先要确定刮板的运行速度,然后才能确定螺旋喂料器的转速。由前面可知,物料到达输送末端后克服重力的作用在离心力的作用下被抛出输送机,离心力公式为:

将已知参数代入式(4)得到物料线速度v=1.403 2 m/s,转化为传动轮转速为n=67 r/min,那么物料抛出输送机的临界速度为67 r/min,当传动轮速度小于67 r/min时,物料离心力小于重力将无法被抛出。为了找到一个最佳的抛出速度,可逐渐增加抛出速度为 80、90、100、110、120、130、140 r/min。
以传动轮速度120 r/min为例,刮板的运动形式为:圆弧—直线—圆弧—直线……,运动时间依次叠加完成刮板的预期运动,以图5中最下方的黑色刮板为例,运动形式如表4所示。

表4 运动类型及时间Table 4 Movement type and time
2.4 创建颗粒工厂
为了使颗粒按设计要求出现,就必须要创建颗粒工厂,这里在装料仓入口处建立颗粒工厂。设定颗粒直径大小按正态分布产生,另外,为了防止仿真一直停留在颗粒的产生过程中,设置放置颗粒的最大尝试次数为20次。
2.5 设置时间步长和仿真时间
时间步长是求解器的迭代时间,本模型中的颗粒排列紧密,可以将时间步长设置为20%倍的瑞利时间。最后,对仿真区域进行网格大小定义,网格越精细仿真结果将越接近真实情况,一般为2~4倍的,这里定义Cell Size为4 Rmin,网格数达到2 525 860个[7],如图6所示。仿真开始7 s的情况如图7所示。
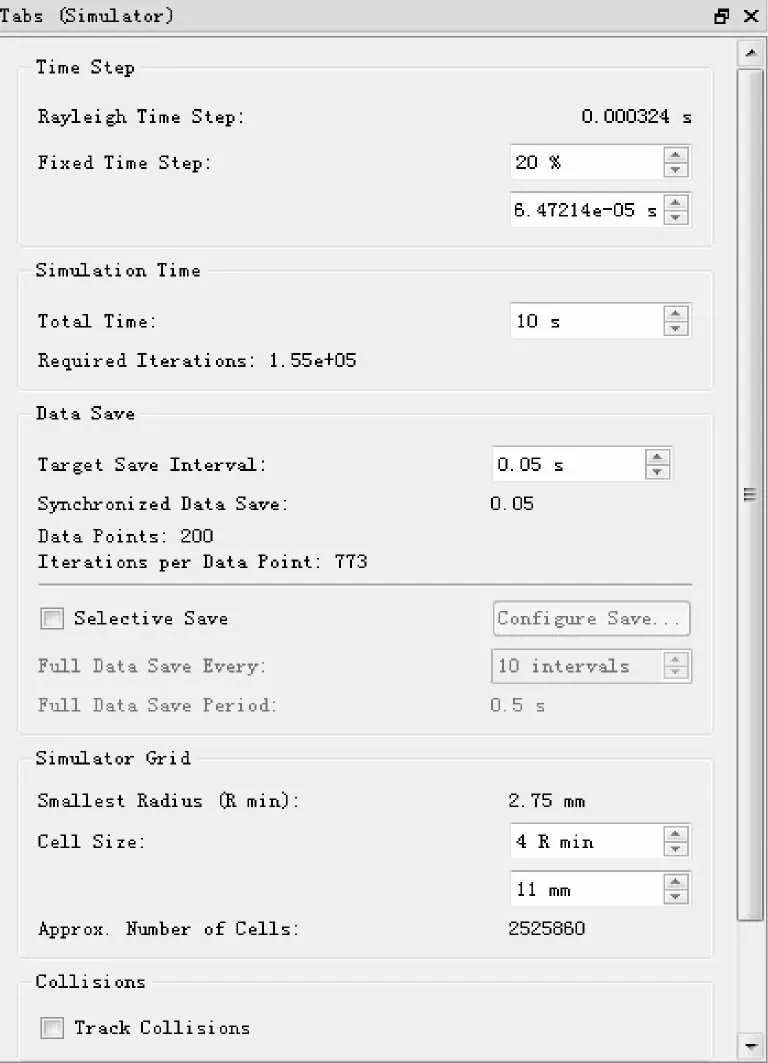
图6 时间参数设定Fig.6 Time parameters

图7 仿真7 sFig.7 Simulation at 7 s seconds
3 仿真结果分析
使用控制变量,通过只改变传动轮转速的方法,获得各转速下颗粒物料的抛出情况进行对比,然后获得颗粒物料抛出的最佳速度;确定刮板最佳运行速度后,进入数据处理模块,在后处理界面可直观地观察颗粒在输送机内的宏观运动情况,并以静态或动态的形式显示出来,这里进一步研究了刮板最佳运行速度下颗粒在输送机内运行情况,主要包括颗粒的运行轨迹、速度和受力等参数。
3.1 刮板不同运行速度下颗粒抛出效果对比
只改变物料抛出速度,控制其他变量一致进行仿真,仿真结束后进行对比获得最合适的物料抛出速度。对 67、80、90、100、110、120、130、140 r/min各速度下的模拟结果进行对比,物料抛出效果图整理后(颗粒以迹线形式显示)如表5所示。
由表5可看出,在传动轮临界转速67 r/min时,颗粒物料有大部分没有抛出;随着转速的逐渐增大,颗粒物料的抛出效果越来越好,回流和掉落现象越来越少;转速为120、130、140 r/min时,颗粒物料抛出效果基本相同,但可看出在转速为120 r/min时,颗粒物料的抛出轨迹曲线最好,所以确定最佳转速为120 r/min。
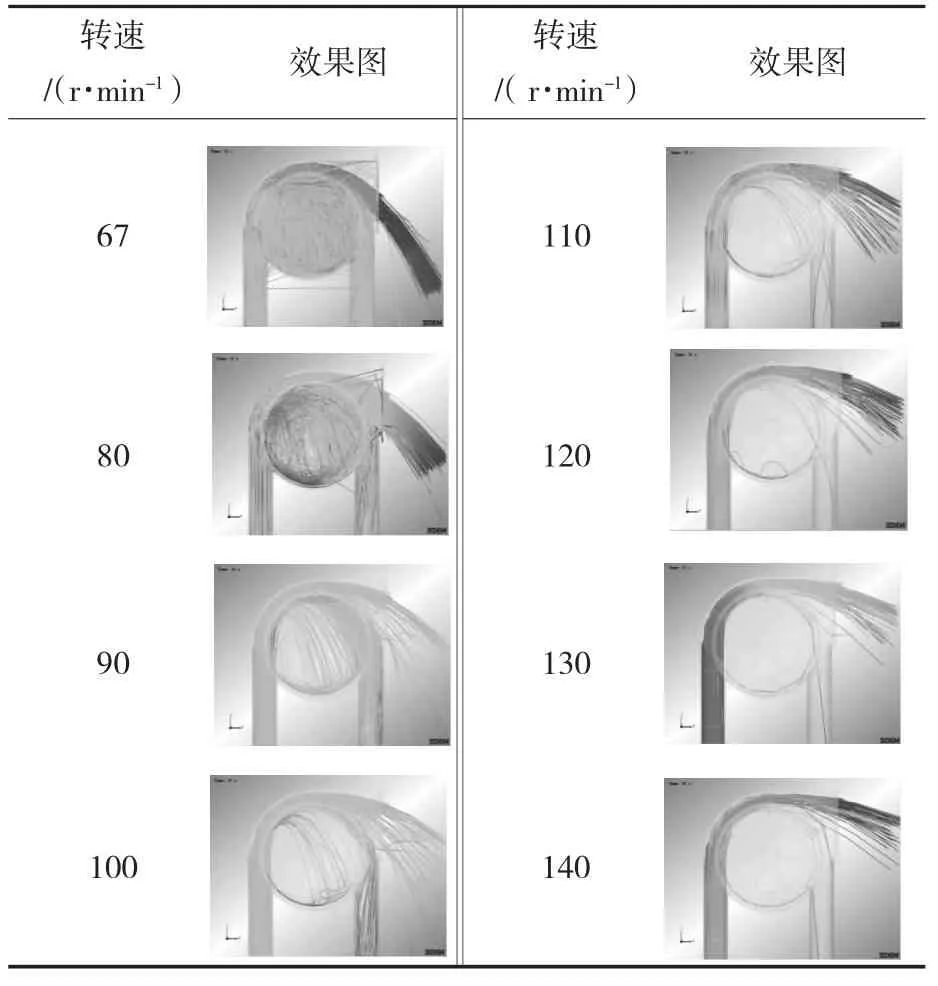
表5 各转速下颗粒物料抛出效果对比Table5 Comparison of the ejection effect of particles at different speeds
在确定了传动轮最佳转速为120 r/min后,由式(3)可得到螺旋喂料器轴的转速。

式中:设定螺旋喂料器填充率φ=0.2;刮板输送容积效率ηV=0.75;代入公式可得n螺=70 r/min。
3.2 传动轮120 r/min时输送过程中单颗粒运行轨迹
通过后处理数据分析,为了更加清楚地显示颗粒的运动轨迹,利用EDEM后处理中Selection选取具有代表性颗粒,使颗粒以迹线(Stream)形式显示获得了颗粒的输送轨迹如图8所示。将颗粒在X、Y、Z轴方向上位置坐标输出并将数据整合,然后导入MATLAB中,在同一坐标系中绘制三维立体轨迹曲线图,如图9所示。
从图9可看出,颗粒在抛出过程中,从圆弧段运动到直线段时出现了碰撞,但基本处于稳定状态,说明仿真模型基本符合要求。
3.3 输送过程中颗粒平均运行速度
通过运行仿真,发现颗粒在刮板输送段内的时间较短,在8.85~9.65 s时间段内能够较准确地反映颗粒在输送管内的运行速度情况。理想状态下,在此时间段内颗粒仅在Y轴正向有运动速度,颗粒在此时间段内Y轴方向的运行速度曲线如图10所示;而经过数据收集发现此时间段内颗粒在X轴和Z轴方向上也存在着一定的速度,如图11和图12所示。
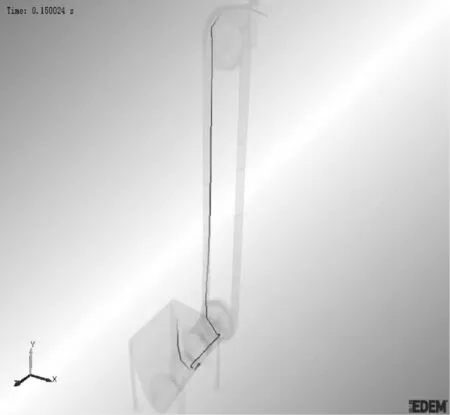
图8 颗粒以迹线(Stream)形式显示轨迹Fig.8 The particle tracks in the form of stream

图9 MATLAB中显示颗粒轨迹Fig.9 The particle tracks in MATLAB
由图10—图12可以得到,颗粒8.85~9.65 s时间段内在Y轴方向、X轴方向和Z轴方向的平均运行速度如表6所示。
从表6可以看出,颗粒在Y轴向的平均运行速度为 2.512 438 235 m/s,和理论值 2.513 274 m/s相差不大,基本能够正确反映颗粒在输送管内的运行情况;而颗粒在X轴和Z轴存在着较小的速度分别为0.005 629 686 m/s和-0.000 251 065 m/s,可知在垂直输送段内运行时,颗粒和管道内壁存在着一定的碰撞现象,但都非常微弱可以忽略。总的来看颗粒在输送过程中还是比较稳定的。
3.4 输送过程中颗粒受力
通过情况分析,发现颗粒在输送过程中存在轻微波动,这样就肯定存在着撞击,那么就要研究颗粒在输送过程中的受力情况,防止颗粒因为撞击而破碎。将颗粒的受力曲线图输出如图13所示。
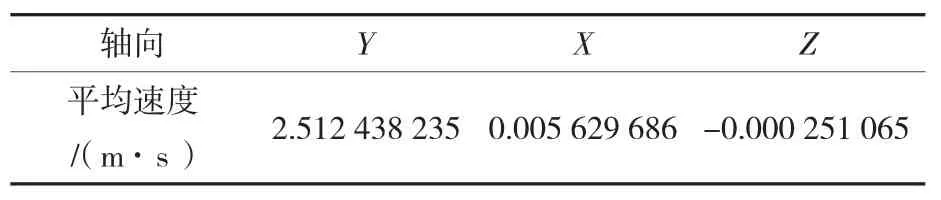
表6 坐标轴各向平均运行速度Table 6 Average speed at each axial direction
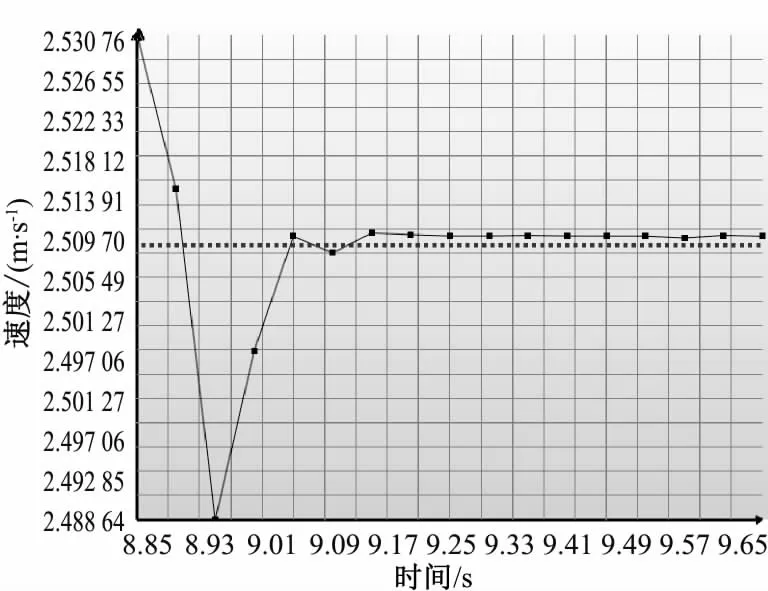
图10 时间段8.85~9.65 s内颗粒Y轴向速度曲线Fig.10 Velocity curve of particles in Y axial within 8.85 to 9.65 seconds

图11 时间段8.85~9.65 s内颗粒X轴向速度曲线Fig.11 Velocity curve of particles in X axial within 8.85 to 9.65 seconds

图12 时间段8.85~9.65 s内颗粒Z轴向速度曲线Fig.12 Velocity curve of particles in Z axial within 8.85 to 9.65 seconds

图13 颗粒受力曲线Fig.13 Particle force curve
由图13可知,颗粒受力的峰值为0.058 976 7 N,出现在8~9 s时间段内,即颗粒从螺旋喂料器进入输送管道的过程中,此过程中颗粒受到刮板的撞击,受力发生突变,受力增大,但力的大小基本可以忽略。
4 结论
本文在创建了有效的仿真模型后,以物料为研究对象成功地模拟了圆盘刮板输送机垂直输送方式的整机运行。首先解决了刮板从直线段到弯曲段的运动过渡问题;其次得到了颗粒物料抛出的最佳速度为120 r/min,进而确定了螺旋喂料器的喂料速度为70 r/min,实现了螺旋喂料器和刮板输送的产量配合,并为后处理中对颗粒的分析提供了基础;最后得到了颗粒的运行参数,包括运行轨迹、速度和受力。从轨迹线可看出,颗粒在输送过程中,从弯曲段运动到直线段时出现了碰撞,但基本处于稳定状态,说明仿真模型基本符合要求。从颗粒的速度曲线可以看出,颗粒在输送过程中和管道内壁存在着一定的碰撞现象,但都非常微弱可以忽略,基本和刮板的运动保持一致。从受力来看,颗粒会受到刮板和管道内壁的作用力,但力的大小都非常小可以忽略。总之这些都为今后对此种输送机进行进一步的研究提供了重要的基础,也弥补了这方面文献的不足。
[1]姚艳萍.圆盘管道刮板输送机的离散元仿真和多属性评价研究[D].太原:太原理工大学,2015.
[2]Aerro Me Chanical.ConVeyors[DB/OL].[2017-01-10]http://www.floveyor,com/.
[3]刘璘.离散元素法在球磨机研究中的应用[J].南阳理工学院学报,2012(4):62-66.
[4]王福林,尚家杰,刘宏新,等.EDEM颗粒体仿真技术在排种机构研究上的应用[J].东北农业大学学报,2013(2):110-114.
[5]刘怀昌.链式圆管刮板输送机设计及DEM仿真优化[D].郑州:河南工业大学,2015.
[6]刘四麟,粮食工程设计手册[M].郑州:郑州大学出版社,2002.
[7]王国强.离散单元法及其在EDEM上的实践[M].西安:西北工业大学出版社,2010.
[8]刘浩宇.基于solidworks的刮板输送机中部槽三维参数化建模[N].科学导报,2009-05-25(019).
[9]伍维维,阮竞兰.FLOVEYOR钢索管式刮板输送机[J].粮食与饲料工业,2011(4):6-7.
[10]李海燕,孟文俊.用EDEM分析不同充填率对垂直螺旋输送机性能的影响[C]//物流工程三十年技术创新发展之道.北京:中国铁道出版社,2010.
[11]孟杰,孟文俊,杨正茂.刮板输送机模型建立对EDEM仿真结果的影响因素分析[J].起重运输机械,2015(1):50-53.
[12]李海燕.基于EDEM的垂直螺旋输送机性能参数仿真研究[D].太原:太原科技大学,2011.
[13]刘伟立,卫红波.基于EDEM软件的螺旋输送机仿真及分析[J].机械工程师,2015,10:121-123.
[14]陈龙,张克平,樊宏鹏.基于EDEM的带式输送机工作过程仿真分析[J].林业机械与木工设备,2016(9):17-19.
[15]程敬爱,孟文俊,张启胤.散体在垂直螺旋输送机内流动性研究[J].机械工程与自动化,2012(6):1-3.
[16]周文君,卫红波.基于EDEM的带式输送机输送过程仿真及分析[J].煤矿机械,2013(5):89-91.
[17]姚艳萍,寇子明,孟文俊.散体物料在管道刮板输送机垂直段运行时的力学分析[J].起重运输机械,2013(9):34-37.
[18]王东霞.螺旋输送机的数值分析及优化设计的研究[D].郑州:河南工业大学,2012.
[19]梅磊.螺旋卸船机垂直输送机理及试验研究[D].武汉:武汉理工大学,2014.
[20]盛利.带式输送机三维设计系统开发[D].太原:太原科技大学,2014.
EDEM SIMULATION RESEARCH OF VERTICAL DISC TUBE SCRAPER CONVEYOR
CHI Youyang,RUAN Jinglan
(School of Mechanical and Electrical Engineering,Henan University of Technology,Zhengzhou450001,China)
The Solidworks simulation model was established for the domestic unfamiliar vertical disc tube scraper conveyor. The macroscopic movement of soybean particles during transportation was simulated based on discrete element simulation software EDEM. By changing the speed of a driving wheel,the optimal ejection velocity of the particle was obtained by using the control variable method. Through post processing analysis,the operation condition of particles in the conveyor was obtained,mainly including the particle trajectory plotting for observing the collision of the particles,the velocity at each axial direction of the particle for analyzing the operation stability of the particles,and the force analysis during particle transportation to prevent the occurrence of the particle breakage. The paper provides base data for the simulation research of the disc tube scraper conveyor.
vertical disc tube scraper conveyor;discrete element;EDEM;soybean particle model
TS 203 文献标志码:B
1673-2383(2017)05-0093-07
http://kns.cnki.net/kcms/detail/41.1378.N.20171030.0936.034.html
网络出版时间:2017-10-30 9:36:41
2017-02-09
河南省科技攻关计划项目(16210210107)
池优阳(1991—),男,河南舞阳人,硕士研究生,研究方向为粮油机械设计理论。
