基于GPS测姿仪的电力铁塔姿态监测研究
2017-11-09陈强强陈志平施浒立徐贤焕
陈强强, 陈志平, 施浒立, 徐贤焕
(1. 杭州电子科技大学 机械工程学院,浙江 杭州 310018;2. 中国科学院 国家天文台,北京100010; 3. 国家电网浙江电力公司 台州供电公司,浙江 台州 318000)
基于GPS测姿仪的电力铁塔姿态监测研究
陈强强1,2, 陈志平1, 施浒立2, 徐贤焕3
(1. 杭州电子科技大学 机械工程学院,浙江 杭州 310018;2. 中国科学院 国家天文台,北京100010; 3. 国家电网浙江电力公司 台州供电公司,浙江 台州 318000)
针对电力铁塔的实时高精度姿态监测问题,对GPS基线测姿原理进行研究,设计和开发了GPS测姿仪,在3D3S软件中建立电力铁塔的三维模型并对其施加极端荷载,通过分析仿真结果,得到铁塔姿态角的合理变化范围及确定测姿仪安装位置,并制定了铁塔安全状态判定策略,提出了基于GPS测姿仪的电力铁塔姿态监测方案。搭建铁塔场景对测姿仪的测姿精度进行实测实验,实验结果表明:GPS测姿仪的测姿精度达到0.1°,可满足电力铁塔监测要求,稳定性好,能够实现高精度实时监测。
GPS测姿; 电力铁塔; 实时监测; 高精度
0 引言
电力铁塔的塔体稳定是保障输电线路安全运行的重要前提,为了及时发现铁塔的倾斜变形,避免倒塌事故发生,需要及时掌握电力铁塔的状态。目前,在输电线路中对铁塔运行状态进行检测的常规方法是人工周期巡检,此方法无法实时监测铁塔在运行过程中的状态。
针对目前检测方法的不足,国内外对于电力铁塔的实时监测方案已经做了大量研究[1-2]。文献[3]基于GPRS/RFID技术搭建电力铁塔实时在线监测系统,验证了系统的技术实现路线;文献[4]基于无线传感器网络,研究了无线传感器网络的拓扑结构以及数据传输方案并应用于电力铁塔的监测与预警系统;文献[5]提出了一种电力铁塔运行状态智能在线监测系统,通过无线通信将结果发送到状态监测工作站实现实时在线监测。但上述研究着眼于如何实现实时监测,对于铁塔实时姿态的角度变化以及监测效果是否合理尚未论证,且利用传感器监测存在漂移和累积误差的缺陷。
为此,本文对现有的GPS测姿技术深入研究[6-8],基于GPS基线测姿原理研制了GPS测姿仪,由于电力铁塔的危险工况在实际中难得一遇[9],故建立铁塔模型仿真分析,得到铁塔转角的合理变化范围,并通过实验验证了测姿仪的测姿精度,最终提出基于GPS测姿技术的电力铁塔姿态监测方案。与传统的姿态测量手段相比,GPS姿态测量具有覆盖面广、受环境影响小、无累积误差和精度高等优势,将GPS测姿技术用于电力铁塔能够实现高精度的实时姿态监测。
1 GPS基线测姿原理
GPS定姿测量通常采用载波相位测量技术,载波相位观测方程通常可以记为:

ρeph+ρmp)-N+εa+εb
(1)
式中:φ表示实际的载波相位观测值;λ是载波波长;R为卫星到接收机的距离;ρion为电离层延时误差;ρtrop为对流层延时误差;ρeph为卫星星历误差;ρmp为多径效应误差;N为初始整周模糊度;εa为卫星钟差;εb为接收机钟差。将2个接收机近距离放置,由于卫星到接收机距离很遥远,卫星发出的GPS信号到达接收机的传播路径可认为一致。因此将载波相位观测量在接收机之间求单差,可消除卫星相关的误差。
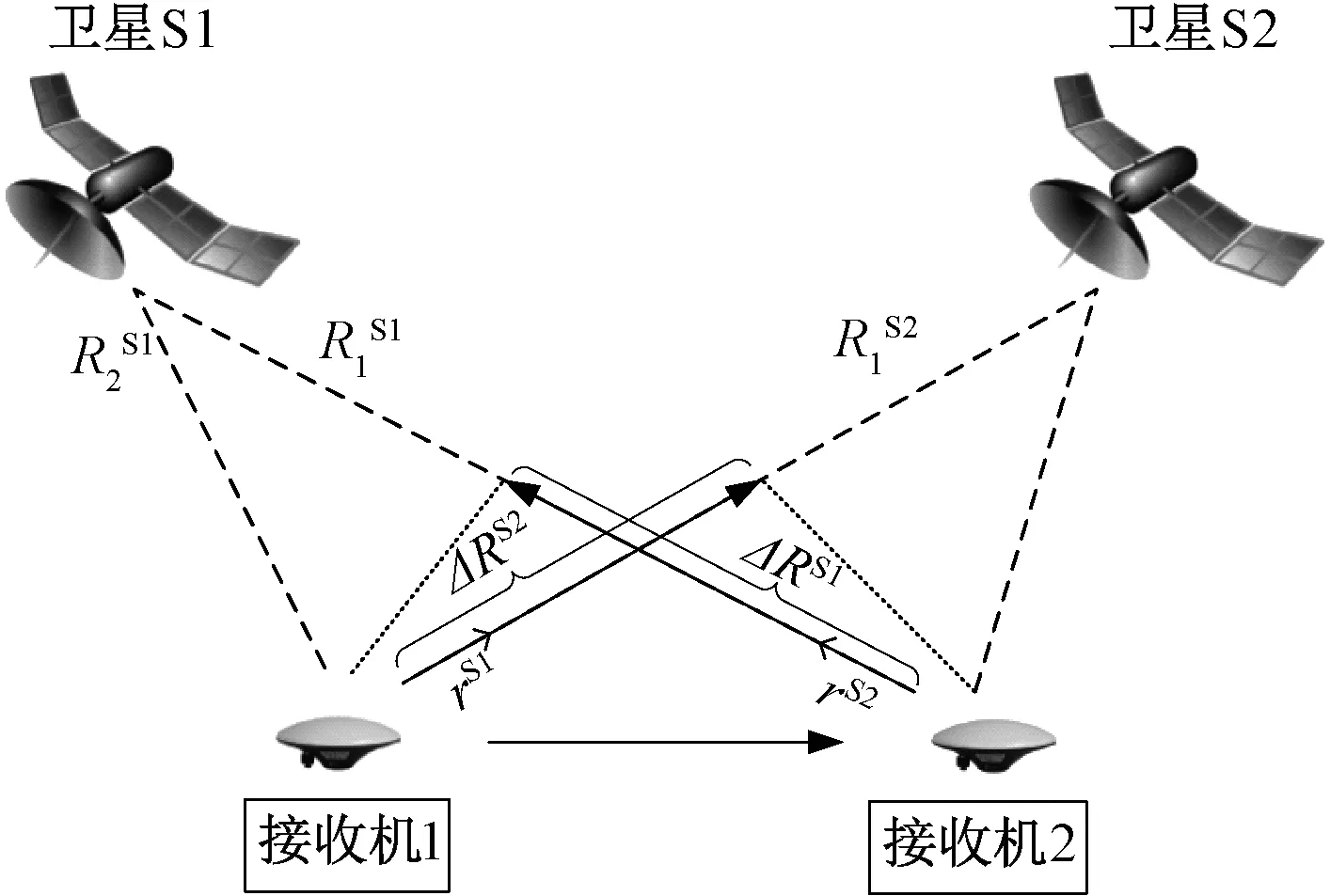
图1 GPS基线测量原理
如图1所示,接收机1、2同时接收卫星S1、S2信号,得到单差观测方程组:
(2)

(3)
式中:ΔR12表示接收机1、2到达卫星1的距离差与到达卫星2的距离差的差值;ΔN12为新的模糊度参数,经双差处理后的载波相位测量值可消除大部分误差。如图1所示,GPS卫星到达地面天线的相位差也可以用向量投影表示,式(3)转化为:
(4)
式中:b为天线间的基线矢量;r1、r2为天线至卫星方向的单位矢量,天线位置坐标和卫星坐标可通过卫星定位及卫星星历得到,因此r(1)=r1-r2已知。当观测m颗卫星时,可得到观测方程组:
(5)
式(5)中,由于m颗卫星的模糊度存在相关性,当求解出正确的模糊度时,观测方程组有唯一解,将求解出的基线矢量b通过坐标变换即可得到基线姿态角。
2 基于载波相位技术的GPS测姿仪开发
2.1整周模糊度解算算法
由GPS基线测姿原理可知,要得到高精度的航向角、俯仰角和横滚角,载波相位观测值的利用必不可少,但接收到的载波相位观测值含有未知整周模糊度,所以整周模糊度的解算结果直接影响三维姿态角求解的准确性。为此,在GPS测姿仪的ARM芯片中,采用LAMBDA算法[10-11]解算模糊度,算法的基本思想如下:
载波差分定位的双差观测方程可表示为:
y=Bb+Aa+e
(6)
式中:y为m×1阶双差观测量;B为基线矢量的m×p阶的构造矩阵;b为p×1阶基线矢量。A为模糊度的m×n阶构造矩阵;a为n×1阶双差模糊度矩阵,a为整数;e为观测噪声。
对式(6)的模糊度整数解a的估计准则为:
(7)

(1)a∈Zn,搜寻n×n阶矩阵Z,满足:a为整数时,z=ZTa也为整数;z为整数时,a=(ZT)-1z也为整数。
(2)对原始矩阵做如下变换:
(8)
(9)

完成上述解算步骤后,还需对解算得到的整周模糊度进行验证确认。采用比例检验法,即通过次小残差平方和与最小残差平方和的比值来检验,即:

(10)
式中:Ω2为次小残差平方和;Ω1为最小残差平方和;τ为阈值(通常取2),当式(10)成立时可认为最优解正确。
2.2GPS测姿仪硬件设计
测姿仪的模块结构如图2所示,测姿仪采用短基线结构,主要包括接收天线、载波相位测量模块、ARM处理芯片以及惯性器件构成。采用高精准四馈点测量天线,将接收到的GPS信号分别送入接收机模块中处理,获得卫星位置、信噪比、载波相位等信息后,输出到ARM芯片(型号为NXP LPC1788 Cortex-M3)中解算。同时利用具有三轴加速度和三轴陀螺仪的惯性测量模块进行辅助测量,并由紧耦合Kalman滤波方法解算得到姿态角。惯性测量模块具有长时累积误差,但是由于短时测量精度较高,与GPS姿态测量形成互补,从而极大地提高了测姿精度和稳定性。考虑到防水及便携性需求,最终研制的实物如图3所示。
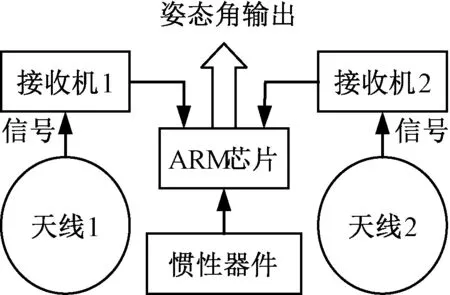
图2 测姿仪模块结构图
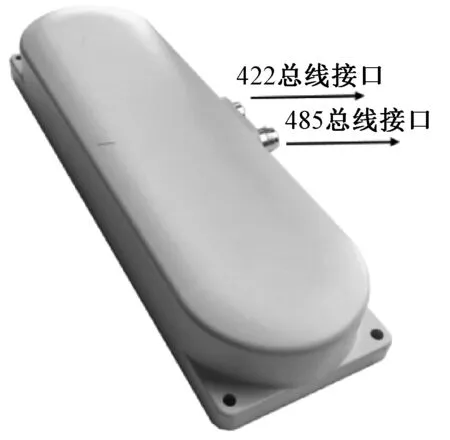
图3 GPS测姿仪实物图
3 基于GPS测姿仪的电力铁塔姿态测量方案研究
3.1电力铁塔姿态角变化量仿真分析
为了确定测姿仪在铁塔上的布设位置以及测姿仪输出实测角度变化量的合理范围,必须了解铁塔在极端工况下的姿态角变化量,而在现实中较难模拟极端工况,因此对电力铁塔进行仿真建模分析。
本文采用3D3S软件对呼称高24 m,塔全高35 m的110JGU33(24)型直线铁塔建立线模型,在线模型中对该型铁塔的主材、斜材以及横隔设定材料和截面参数,线模型与部分参数定义窗参见图4。
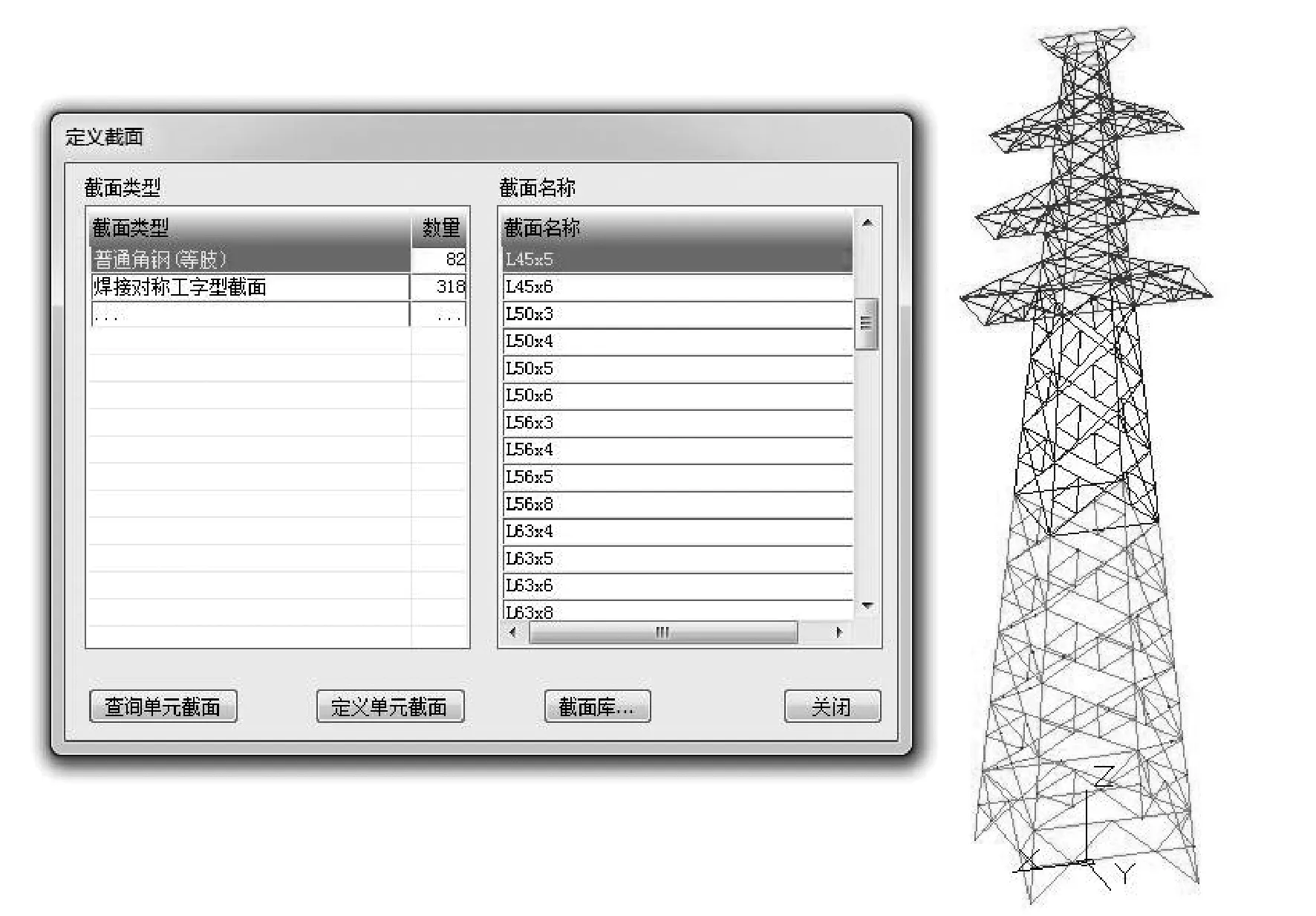
图4 110JGU33型电力铁塔线模型
模型采用了Q235和Q345两种材料,其弹性模量为2.06×105N/mm2,泊松比为0.30,线膨胀系数为1.2×10-5,质量密度为7 850 kg/m3,截面尺寸随铁塔高度变化如表1所示。
表1 截面尺寸选用与铁塔高度关系
建立铁塔模型后,对铁塔受到的危险荷载进行分析。由于风荷载和地震冲击荷载作用下所引起的电力铁塔失稳是电力铁塔破坏的主要因素,因此,考虑可能出现的极端天气,并结合铁塔自重的情况,模拟施加荷载如表2。
在表2所示荷载的组合作用下,通过结构仿真分析,得到铁塔三维姿态角变化云图如图5所示。图5中,以塔底中心为坐标原点建立右手坐标系,从左到右分别是铁塔绕X轴(俯仰角)、绕Z轴(方向角)和绕Y轴(横滚角)的转角变化情况,以逆时针方向为转角偏移正方向,塔身不同高度的转角变化不同,角度值采用弧度单位。
由图5可知,电力铁塔最大转角量发生在塔顶,在塔顶横杆处,其方向角变化值为4.641°,俯仰角变化值为4.183°,横滚角变化值为1.261°;以呼称高度处作为参照,其转角变化量明显降低,方向角变化值为0.516°,俯仰角变化值为0.744°,横滚角变化值为0.974°。在不考虑塔基沉降的情况下,取放大系数1.25,可认为电力铁塔转角动态变化的合理范围是0°~6°。
表2 荷载定义

图5 铁塔三维姿态角变化云图
3.2电力铁塔姿态监测可行性分析
基于GPS测姿仪的电力铁塔姿态实时监测方案是否可行,还需对测姿仪的测量精度进行测试。因此,对GPS测姿仪进行测量精度和稳定性实验如下:为模拟铁塔上的遮挡情况,将GPS测姿仪水平摆放在相邻自制铁塔的其中之一上,如图6所示,设定基准为航向角147.8°,俯仰角和横滚角0.0°。
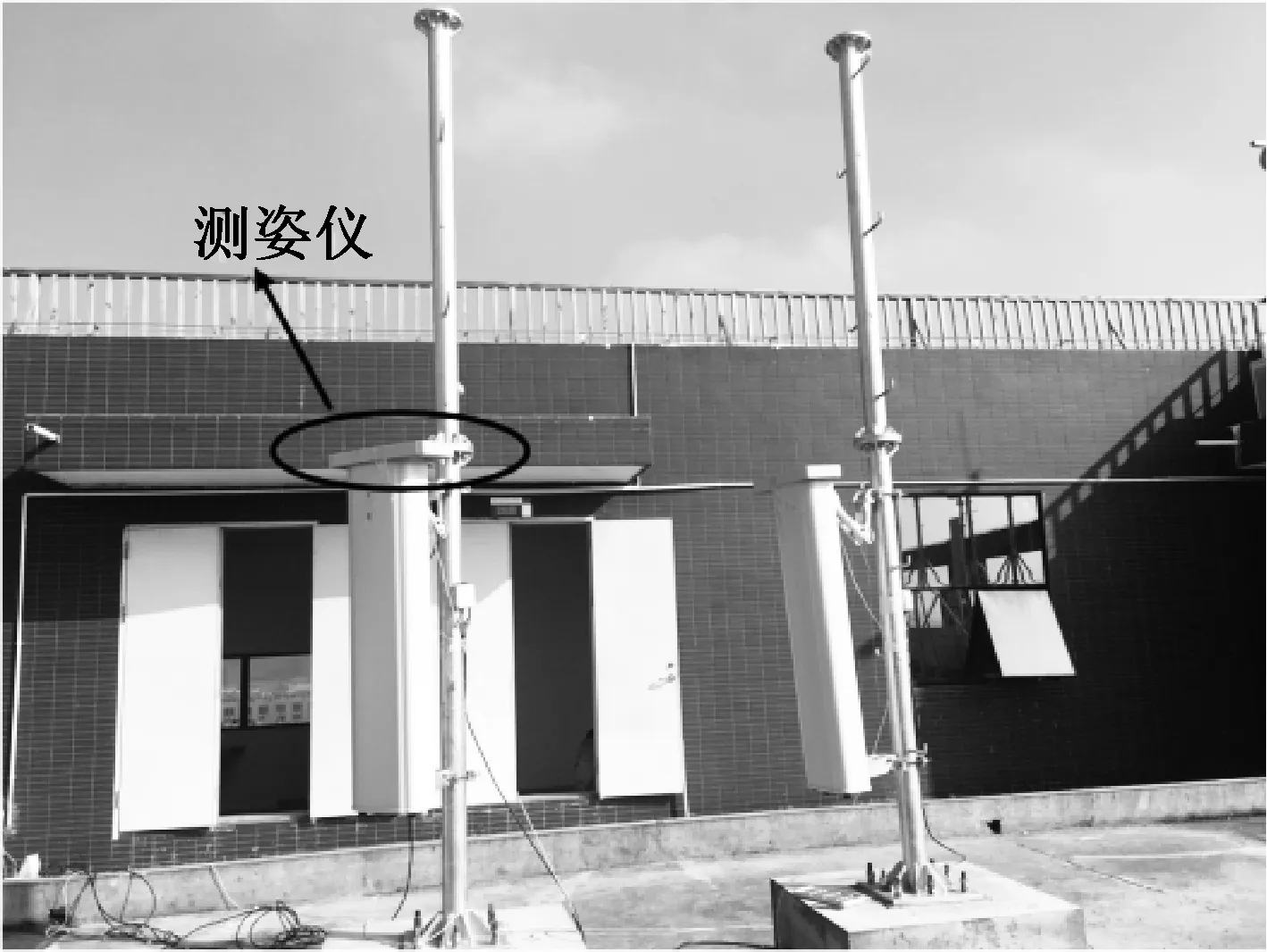
图6 现场实验图
连续测试时间为24 h后,采集实验数据并分析,结果如图7所示。可见GPS测姿仪的三维姿态角输出平稳,其中航向角和横滚角的最大偏差在0.4°以内,俯仰角最大偏差在0.3°以内,各角度的均值和方差如表3所示;通过分析角度曲线,发现俯仰角及横滚角存在初始偏差,在终端上进行初始校准后,俯仰角和横滚角的测量误差在0.1°以内。
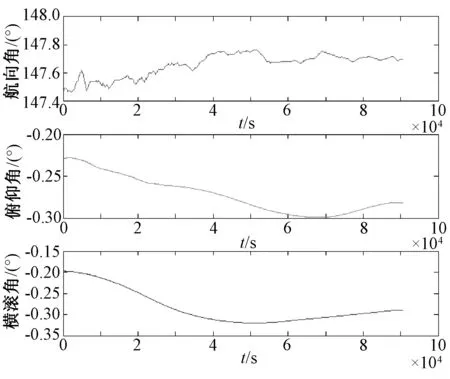
图7 三维姿态角输出测试结果
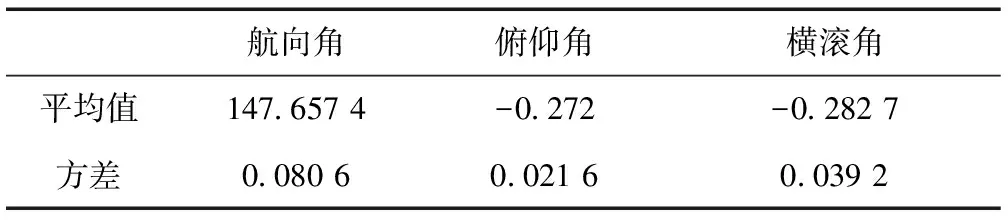
表3 三维姿态角的均值和方差 (°)
另据DL/T741-2010《中华人民共和国电力行业标准:架空输电线路运行规程》:50 m以下高度铁塔倾斜度α≤1%,即当倾角大于0.573°时,电力铁塔处于不安全状态,此处的倾角主要考虑为俯仰角和横滚角,由实测结果可知,测姿仪输出俯仰角和横滚角的精度为0.1°,满足监测要求。
3.3电力铁塔测姿方案设计
首先考虑测姿仪的安装位置,其理想安装位置需能够对铁塔姿态角变化最为敏感以及在天顶方向上无遮挡,且多径效应较小、GPS信号较好,因此,结合电力铁塔仿真分析结果,将测姿仪放置在塔顶横担处较为合适。根据仿真分析得到的电力铁塔姿态角变化合理范围,设计电力铁塔的姿态监测判定流程如图8所示。

图8 电力铁塔姿态监测判断流程图
为了实现对电力铁塔姿态的实时高精度监测,设计如图9所示为电力铁塔的测姿方案。电力铁塔的测姿系统主要由GPS测姿仪、气象仪、无线传输模块、电源及配套电缆组成。气象模块输出气象三要素信息,测姿仪输出三维姿态角,数据传输采用RS485总线由无线传输模块发送。当电力铁塔安置在无移动通信的偏远地区时,方案可以考虑设有北斗模块,通过北斗数据通信卫星,进行长距离数据传输。为此,测姿仪上可以设置RS422总线,经RS422总线由北斗模块发送信息,最终汇总于后台终端。后台终端采集测姿仪的角度输出数据和气象数据,根据姿态监测判定策略可得到电力铁塔的状态监测结果,相关管理人员就能够在远程根据铁塔的状态及时做出维护修缮等决策。
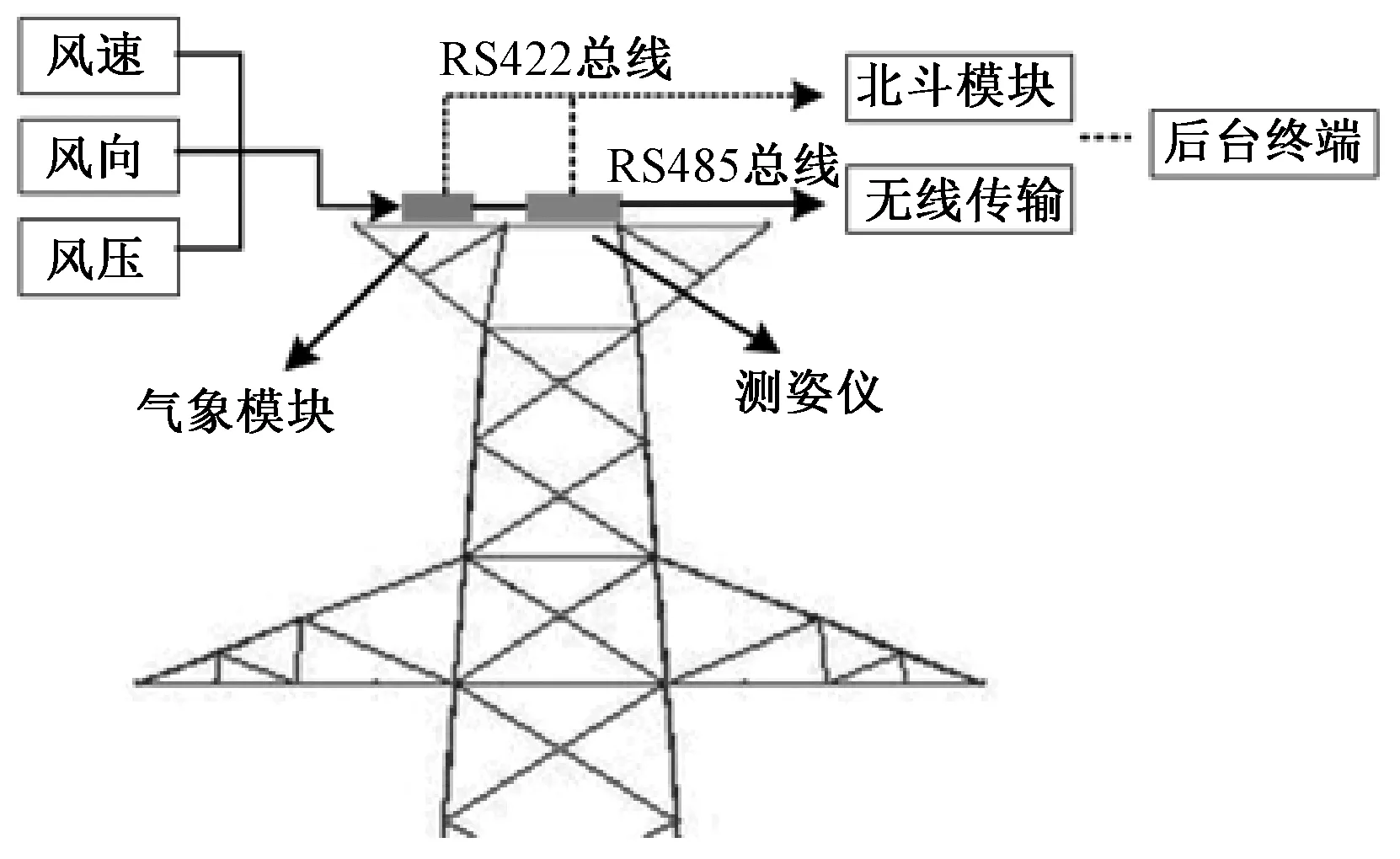
图9 电力铁塔测姿方案示意图
4 结论
(1)本文在研究GPS基线测姿原理的基础上,在硬件上实现开发了GPS测姿仪。
(2)利用3D3S软件对铁塔模型施加荷载组合进行受力仿真分析,从而得到铁塔各杆件的位移转角变化范围,结合测姿仪的实测实验,验证了GPS测姿仪的测姿精度和稳定性可满足电力铁塔的姿态监测要求。
(3)基于GPS测姿仪设计了一种电力铁塔姿态测量方案,具备实时、高精度、稳定性好、数据无线传输等优势,为电力铁塔的安全维护提供技术参考。
[1] BILGIN O, ALTUN Y, MULTURE M.Remote monito-ring and diagnostic system of PLC controlled an elevator using SCADA[C]//Electronic and Computer Engineering in 2010 National conference, Bursa,2010:212-216.
[2] 许进,孔智韬,袁任旭,等. 基于光纤传感技术的电力铁塔监测系统[J].光通信技术,2015,39(7):26-28.
[3] 谢岩,张国歌,高玉梅,等.基于RFID/GPRS技术的电力铁塔实时在线监测系统[J].信息通信,2015(12):135-136.
[4] 刘宏,袁海年,汪国兴.基于无线传感器网络电力铁塔监测系统的研究[J].电测与仪表,2012,49(8):51-54.
[5] 张元军,李清华.电力铁塔运行状态智能在线监测的研究及应用[J].科技视界,2017,5(22):9-11.
[6] 刘心龙,卢立果,刘万科.单频BDS/GPS测姿算法研究与结果对比分析[J]. 测绘地理信息,2015,40(5):17-20.
[7] 李娜.基于GPS/INS组合测姿[D]. 沈阳:沈阳理工大学,2015.
[8] 郑京森. 双天线GPS/SINS组合导航系统研究与设计[D].杭州:浙江大学,2017.
[9] 张志强,安利强,庞松岭,等.基于塔线体系模型的沿海输电铁塔抗风性能研究[J].电力科学与工程,2016,32(11):74-78.
[10] 张伟,高珊.一种固定基线单频整周模糊度求解方法[J].导航定位学报,2016,4(1):88-93.
[11] 吴坤,田林亚,王涛. 基于LAMBDA和DC算法的GPS单历元整周模糊度的快速确定[J]. 测绘工程,2017,26(6):30-33.
Research on Attitude Monitoring Scheme of Power Tower Based on GPS Attitude Measuring Instrument
CHEN Qiangqiang1,2, CHEN Zhiping1, SHI Huli2, XU Xianhuan3
(1. School of Mechanical Engineering, Hangzhou Dianzi University, Hangzhou 310018,China;2. National Astronomical Observatories, Chinese Academy of Sciences, Beijing 100010,China;3. Taizhou Power Supply Company,Electricity Power Company of State Grid, Taizhou 318000,China)
Aiming at the problem of real-time and high precision monitoring for power tower attitude, the attitude measurement theory of GPS baseline is studied in this paper, and a three-dimensional model of the power tower is built in the 3D3S software. Then extreme loads is applied to the model, and the simulation results can be used to obtain the reasonable range of the attitude angle and determine the installation position of the attitude measuring device. Moreover, the safety status determination strategy is worked out, and the attitude monitoring scheme of power tower based on GPS attitude measuring device is proposed. The experimental result shows that the attitude accuracy reaches 0.1 degrees with a good performance of stability, which meets the requirements of power tower monitoring and realizes real-time monitoring with good precision.
GPS;electric steel tower; real-time monitoring; high-precision
10.3969/j.ISSN.1672-0792.2017.10.010
TN401
A
1672-0792(2017)10-0056-06
2017-07-04。
国家自然科学基金(61601009)。
陈强强(1993-),男,硕士研究生,研究方向为数据处理、导航定位及光机电一体化。