考虑永磁磁链变化的内嵌式永磁同步电动机弱磁转矩控制
2017-11-09刘明基张宇鹏
刘明基, 张宇鹏
(华北电力大学 电气与电子工程学院,北京 102206)
考虑永磁磁链变化的内嵌式永磁同步电动机弱磁转矩控制
刘明基, 张宇鹏
(华北电力大学 电气与电子工程学院,北京 102206)
内嵌式永磁同步电动机(Interior permanent magnet synchronous motor, IPMSM)具有磁阻转矩使其利于扩速运行,在高速运行时需要弱磁控制来维持高转矩输出。针对IPMSM永磁磁链随实际运行工况变化的情况,研究了IPMSM弱磁转矩控制,分析了永磁磁链变化与指令电流偏差的关系,并提出了一种基于指令电流查表的弱磁转矩控制新方法。该方法主要包括指令电流查表、电压限制计算和电流修正方向计算三部分。通过与传统弱磁控制进行对比仿真验证了该方案的有效性,方案在永磁磁链变化时的输出转矩偏差明显降低。
内嵌式永磁同步电机; 永磁磁链变化; 弱磁转矩控制; 转矩偏差
0 引 言
永磁同步电动机(Permanent magnet synchronous motor, PMSM)具有功率密度大、重量轻、可靠高效等优点,被广泛应用在伺服驱动、电动车、高档数控机床等领域。PMSM由转子永磁体励磁,高速运行时反电动势会超过逆变器输出电压限制,所以PMSM的宽速域运行依赖弱磁控制。内嵌式永磁同步电动机(Interior permanent magnet synchronous motor, IPMSM)具有磁阻转矩,更适合弱磁扩速控制。
PMSM的弱磁控制理论在1980年被首次提出[1],其思路是利用电枢电流产生的磁场来抵消部分永磁磁链,从而使合成磁链减小、电机反电动势降低。PMSM弱磁控制发展至今,出现了大量的弱磁转速控制方案[2-4],这些控制方案大都具有较强的鲁棒性,对电机参数依赖性小,但均存在无法实现电机输出转矩控制的局限性。有文献利用转矩传感器实现反馈型的高精度弱磁转矩控制[5],但成本较高、可靠性低,并且控制系统动态调节过程较复杂,响应速度慢。因此转矩控制通常采用前馈方案,但前馈型弱磁转矩控制对电机参数的依赖性大,所以永磁同步电动机弱磁转矩控制系统的研究重点是减小参数依赖性,即在电机参数变化时保证转矩控制的精确度。电机的永磁磁链参数会随电机运行时的温度不同发生明显变化,在永磁同步电动机弱磁转矩控制系统设计中应充分考虑。
文献[6]设计了磁链转矩查表的前馈型转矩控制系统,根据指令转矩和电机当前的合成磁链查表获得指令电流,并且计及了电感的非线性因素,减小了参数依赖性。文献[7]利用实验测量的方法,在不同工作电流下的永磁磁链值进行了测量,制作的指令电流查表能够计及不同电流下的永磁体磁链变化情况,也在一定程度上减小了参数依赖性。但是,以上两篇文献及其他大量的前馈型永磁同步电机弱磁转矩控制方案中,均采用了沿恒转矩曲线修正指令电流的方法,在电机永磁磁链参数随电机温度改变而发生变化时,这种指令电流修正方法会导致转矩控制精确度降低。
本文研究了基于指令电流查表的IPMSM弱磁转矩控制系统,详细分析了永磁磁链变化对电机输出转矩的影响,研究并提出了新的查表电流修正方法,使得电机永磁磁链参数发生变化时,输出转矩的控制精度更高。
1 弱磁转矩控制原理与指令电流查表
永磁同步电动机dq坐标系下的电压、转矩、电流方程为[1]
(1)

(2)
Te=1.5np[φfiq+(Ld-Lq)idiq]
(3)
(4)
电机运行于稳态时,式(1)中的微分项为0;由于电机电阻通常很小,并且电机高速运行时,电抗值远大于电阻,所以忽略式(1)中的电阻。当电机的电压合成矢量us与电流合成矢量is的幅值有限制时,将式(2)、(4)中的us和is替换为电压限制ulimit和电流限制ilimit,称替换后的方程为永磁同步电动机的电压、电流限制方程,电机实际运行时由于逆变器直流母线电压UDC的限制,通常将us的极限值ulimit-m设定为0.577倍UDC[1-5]。
将电压、电流限制方程和转矩方程绘制成dq坐标系下的dq轴电流图,如图1所示。

图1 内嵌式永磁同步电动机dq轴电流图Fig.1 dq axis current diagram of IPMSM

在电机转速较低时,为了尽可能减小电机绕组的铜损耗,控制电机运行在恒转矩曲线与MTPA曲线的交点。但随着转速升高,电压限制椭圆缩小,运行点最终将达到椭圆边缘,即发生电压饱和。永磁同步电动机弱磁转矩控制的原理,即在电压发生饱和时控制电机运行点沿恒转矩曲线向d轴负方向移动,电机工作在电压限制椭圆与恒转矩曲线交点,负d轴电流可以抵消永磁磁链,减弱电机的气隙合成磁场,使电机反电动势降低,与此同时电机的电流合成矢量幅值增大,逆变器容量的利用率提高,直到运行点移动到电流限制圆上或MTPV曲线上后,继续向d轴负方向移动工作点会使电流超限或者磁链增大,此时只能降低指令转矩。
2 电机永磁磁链变化与电流修正
2.1电机永磁磁链变化与传统指令电流修正
由于MPSM带载启动或温升等因素使永磁体性能降低,从而使永磁磁链参数发生变化[8,9]。另外,由于逆变器输出的PWM波中含有大量高次谐波,这些高次谐波电流会在永磁转子上产生涡流损耗,从而引起永磁体温升加剧[10]。文献[11]中提到永磁磁链在±75 ℃下的变化范围可以达到±5%。文献[12]详细研究了5种常用于内嵌式永磁同步电动机的永磁材料,这些永磁材料在温度变化时均会导致永磁同步电动机输出转矩发生较明显的变化。对于电机的电阻参数,由于其数值较小,文献中通常忽略其数值随温度的变化。对于电机的电感参数,由于导磁材料在温度变化时导磁率几乎不变,所以dq轴电感可视为不随温度变化[13],通常利用有限元计算对不同定子电流情况下的电感饱和程度进行计算,从而计及电机电感的非线性[14]。
综上所述,电机永磁磁链参数随电机温度改变而变化的程度相较电阻电感参数更加明显。由于电机永磁磁链发生变化后,电流指令查表无法根据变化后的参数及时计算并更新,查表指令和实际情况不匹配,将对电机运行性能产生影响。
为了提高电机控制系统鲁棒性和逆变器直流母线电压利用率,在电机永磁磁链改变时,需要对查表获取的指令电流进行修正。

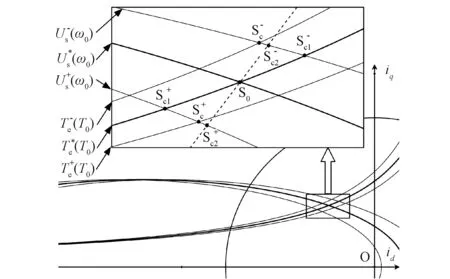
图2 永磁磁链变化后的指令电流修正示意图Fig.2 Schematic diagram of the instruction current correction after the change of permanent magnetic flux

2.2考虑永磁磁链变化的指令电流修正
为了保证指令电流修正后电机输出转矩对指令的跟踪,本文对指令电流查表的计算进行分析,将电压方程与转矩方程联立并进行推导,得
(5)
其中
(6)
(7)
其中
(8)

当Δφf很小时有
(9)

(10)
ΔLPI的值由点
电压饱和情况确定,取该点刚好处于ulimit饱和边缘时ΔLPI的值,从而使修正后的指令电流接近准确解。如图2中所示,Sc2点较Sc1更接近实际准确电指令流点Sc,并且当Δφf较小时ΔLPI≈Δφf。指令电流修正部分的算法框图如图3所示。

图3 指令电流修正算法框图Fig.3 Block diagram of instruction current correction


(11)
将电压限制与电流控制器输出的指令电压矢量幅值的差值进行比例积分,然后按比例Nd,Nq对dq轴指令电流进行补偿。
需要说明的是:在弱磁工况下计算出的电压限制ulimit的值与逆变器的输出电压极限ulimit-m相等;当电机运行过程中永磁磁链变化较大时,本文控制方法下电机输出转矩也会存在一定误差,但相对于传统电流修正方法,误差将明显减小;由于查表在电流限制圆上的工作点电流修正后可能会超出限制,所以指令电流查表的弱磁转矩控制方案在前期制作电流查表时均需要为电流限制取值考虑一定余量。
3 控制系统仿真及结果分析
根据以上分析,可得到内嵌式永磁同步电动机弱磁转矩控制系统框图,如图4所示。图4中虚线方框内为电流修正部分,取一组电机参数d轴电感Ld为0.002 5 H,q轴电感Lq为0.007 5 H,永磁磁链设定值φf为0.75 Wb,极对数np为2,电压极限ulimit-m为500 V,电流限制ulimit为193 A。

图4 内嵌式永磁同步电动机弱磁转矩控制系统框图Fig.4 Block diagram of IPMSM field weakening torque control system
如图5所示,电机实际永磁磁链变化为设定值的90%,以恒速295 rad/s运行,突加转矩指令250 Nm,电机运行于弱磁状态。采取本文电流修正方法后,电机平均输出转矩与指令转矩偏差1%,而采取沿恒转矩曲线的传统电流修正方法的控制方案,电机输出转矩偏差较大,约为8%。

图5 两种电流修正方法电机输出转矩对比Fig.5 Comparison of motor output torque under two current correction methods
4 结 论
本文针对前馈查表的内嵌式永磁同步电动机弱磁转矩控制,提出了一种更加精确的指令电流修正方法。从原理上阐述了永磁同步电动机的永磁磁链参数变化,将导致电压饱和与弱磁失控,或电压利用率下降;分析了永磁磁链参数变化下,传统的电流修正方法的转矩控制精度下降的局限性;推导了指令电流查表的计算过程,提出了新的指令电流修正方法。对本文提出的弱磁转矩控制方案进行了仿真验证,通过与传统查表指令修正方法进行对比仿真验证,证明了本文指令电流修正方法的优越性,在永磁磁链变化时,输出转矩可以更加准确的跟踪指令。
[1] JAHNS T M. Flux-Weakening Regime Operation of an Interior Permanent-Magnet Synchronous Motor Drive [J]. IEEE Transactions on Industry Applications, 1987, IA-23(4): 681-689.
[2] YU Yanjun, CHEN Yanfeng, BI Yunlong, et al. Adaptive control of negative-saliency PMSM based on online parameter identification [C] //IECON Annual Conference of the IEEE Industrial Electronics Society. 2016: 2660-2665.
[3] 方晓春, 胡太元, 林飞,等. 基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制 [J]. 电工技术学报, 2015, 30(2): 140-147.
[4] 盛义发, 喻寿益, 桂卫华,等. 轨道车辆用永磁同步电机系统弱磁控制策略 [J]. 中国电机工程学报, 2010, 30(9): 74-79.
[5] BECH M M, FREDERIKSEN T S, SANDHOLDT P. Accurate torque control of saturated interior permanent magnet synchronous motors in the field-weakening region [C]Industry Applications Conference, 2005 Fourtieth Ias Meeting Conference Record of the IEEE, 2005: 2526-2532.
[6] HAO G, MIAO Y U, BILGIN B, et al. Speed Range Extended Maximum Torque per Ampere Control for PM Drives Considering Inverter and Motor Nonlinearities [J]. IEEE Transactions on Power Electronics,2016: 7151-7159.
[7] CHENG B, TESCH T R. Torque Feedforward Control Technique for Permanent-Magnet Synchronous Motors [J]. IEEE Transactions on Industrial Electronics, 2010, 57(3): 969-974.
[8] 曾金玲, 卢炳武, 霍福祥. 电动汽车用永磁同步电动机的退磁特性分析研究 [J]. 汽车技术, 2012(8): 15-18.
[9] 唐旭, 王秀和, 李莹. 三相不对称供电异步起动永磁同步电动机的退磁研究 [J]. 中国电机工程学报, 2015, 35(23): 6172-6178.
[10] 李虎, AKIHIRO H. PWM逆变器下永磁同步电动机中永磁体的三维涡流分析 [J]. 清华大学学报(自然科学版), 2009, 36(8): 1-5.
[11] 丁晓峰, 刘景林, CHRIS M. 混合动力汽车牵引电机永磁体温度建模 [J]. 电机与控制学报, 2012, 16(10): 100-106.
[12] 王艾萌, 李和明. 永磁材料及温度对内置式永磁电机性能及转矩脉动的影响 [J]. 华北电力大学学报(自然科学版), 2008, 35(3):24-27.
[13] 杜玉峰. 基于铁磁材料温度特性测试的磁场与温度场耦合仿真研究 [D]. 沈阳:沈阳工业大学,2016.
[14] 刘健夫, 王艾萌, 魏亮. 基于有限元的内置式永磁同步电机矢量控制性能分析 [J]. 华北电力大学学报(自然科学版), 2010, 37(2): 33-37.
Field Weakening Torque Control for IPMSM Considering Change of Permanent Magnet Flux
LIU Mingji, ZHANG Yupeng
(School of Electrical and Electronic Engineering, North China Electric Power University, Beijing 102206, China)
The reluctance torque of the interior permanent magnet synchronous motor (IPMSM) is suitable for speed expanding operation, and the field weakening control is required in high speed operation in order to maintain high torque output. Considering the change of permanent magnet flux in different actual operating conditions, this paper studies the field weakening torque control for IPMSM and analyzes the relationship between the change of permanent magnet flux and the instruction current error. Therefore, a novel method of field weakening torque control based on instruction current lookup table is proposed. The method consists of three parts, including instruction current lookup table, voltage limit calculation and current correction direction calculation. The validity of the proposed method is verified by comparing simulations with the traditional filed weakening control. The output torque error under the change of permanent magnet flux is decreased obviously due to the application of proposed method.
interior permanent magnet synchronous motor; change of permanent magnet flux; field weakening torque control; output torque error
10.3969/j.ISSN.1007-2691.2017.05.10
TM351
A
1007-2691(2017)05-0069-05
2016-12-17.
刘明基(1969-),男,副教授,研究方向为新型电机理论分析、优化设计及控制;张宇鹏(1992-),男,硕士研究生,研究方向为永磁同步电动机驱动控制。
