基于嵌入式计算机的稳定平台控制系统设计
2017-11-04程桂林杨成顺
杨 睿, 韩 笑, 程桂林, 杨成顺
(南京工程学院 电力工程学院, 南京 211167)
基于嵌入式计算机的稳定平台控制系统设计
杨 睿, 韩 笑, 程桂林, 杨成顺
(南京工程学院 电力工程学院, 南京 211167)

针对稳定平台控制系统要求体积小、功耗低、抗干扰能力强等一系列特点,设计了一套以80×86架构嵌入式计算机为核心的机载三轴稳定平台控制系统;利用惯性坐标系、载体坐标系和天线平台坐标系之间的变换原理,设计了一种可以隔离载体干扰角运动并实现目标稳定跟踪的稳定平台双回路控制系统模型,并通过Matlab仿真验证了控制方法的正确性;详细设计了包括嵌入式计算机的各模块组成及连接,光电编码器、陀螺仪、GPS等惯性敏感元件的选型和配置,主控制程序及地面遥测计算机软件的流程与功能;现场试验结果表明,稳定平台目标跟踪误差范围达到±0.5°的设计要求。
稳定平台; 嵌入式系统; 坐标变换; 双回路控制; 目标跟踪误差
0 引 言
机载型稳定平台是一种广泛应用于军事和民用领域并集合了光学、电子和机械等专业技术为一体的高精度跟瞄设备。稳定平台控制系统通过各类惯性敏感元件测量平台相对于惯性坐标系姿态角和位置的变化,驱动伺服电机转动保持平台坐标基准的稳定,并通过安装在平台内部的光学或电子探测设备对所设定的目标进行自动跟踪[1-3]。
目前,国内外的科研机构及相关企业设计并研制了多种类型的稳定平台控制系统。例如,文献[4]中以DSP芯片TMS320F28335为核心并结合多传感器采集和伺服控制技术,设计了一种可隔离海面干扰角运动的两轴系稳定平台控制系统;文献[5]中设计了一套基于S3C2440控制处理器的数据处理控制单元和以驱动电机为执行单元的高性能车载稳定平台控制系统;针对动态响应性要求高,快速数据处理,方便调试易于操作的要求,文献[6]中设计了一种以ARM CortexM3的STM32 F103VET6为核心控制芯片的车载平台稳定系统。相比于以上类型的稳定平台,机载稳定平台对控制系统一般有以下的要求:① 由于载荷有限,在狭小的设备安装空间内要尽可能的合理配置控制系统的重量和体积;② 根据机载设备供电方式的特殊性,要求尽可能的减少控制系统的功耗;③ 由于机载稳定平台工作在多震动、强电磁干扰、高温差和高湿度的环境之下,要求控制系统具有较强的抗干扰能力[7]。
1 稳定平台及控制系统设计
1.1总体结构
机载稳定平台及控制系统主要由三轴系角位置伺服平台、电子控制器、垂直光纤陀螺、机体航姿传感器、GPS接收机和增量式光电编码器、遥控遥测通道和地面测控计算机等部件组成。总体结构如图1所示。

图1 机载稳定平台总体结构图
稳定平台及其控制系统根据设定的地面目标,实时计算出跟踪指令以实现对目标的闭环控制;光电编码器反馈当前各轴系的角位置值;垂直光纤陀螺和机体航姿传感器分别测量被稳定目标视轴和载机相对于惯性坐标系的角速率和角位置变化;电子控制器利用由GPS获得的载机位置信息和被跟踪目标位置信息,利用惯性坐标系OiXiYiZi、载体坐标系ObXbYbZb和天线平台坐标系OrXrYrZr之间的转换矩阵计算出各轴系所需要旋转的绝对角度;由伺服功率放大器驱动3个轴系的直流力矩电机各自旋转,使得天线的视轴方向稳定地指向被跟踪目标的位置点。
1.2控制系统模型设计
控制系统模型采用双回路结构,速率稳定内回路隔离各类载体干扰角运动对平台各轴系转动的影响,使得视轴指向目标的误差保持在一定范围[8];位置跟踪外回路则是在视轴稳定的基础之上,根据计算出的当前视轴与目标视轴方向之间的角度偏差信号,实现目标视轴指向的快速响应和跟踪,控制模型结构如图2所示。

图2 稳定平台控制系统模型结构图
整个控制模型的功能主要分为3个部分:
(1) 姿态角指令计算。控制子模块C1根据输入的载机在惯性坐标系OiXiYiZi下的位置信息以及目标点的位置信息可以计算出目标视轴正确指向目标时所需要转动的方位角的数值为:

(1)
目标视轴需要转动的俯仰角为:
θg=arctan{(zb-zd)[(xb-xd)2+
(2)
探测天线的极化角φg一般由用户设定。由此可以得到目标视轴在惯性坐标系下在方位、俯仰和横滚方向上对准被跟踪目标的所设定姿态角的指令为:(γgi,θgi,φgi)。
(2) 控制律和校正环节。在控制子模块C2和C3中,速率稳定内回路和位置跟踪外回路均采用PID控制方法。同时为了使被控系统具有良好的动态和稳态性能,采用“滞后-超前”环节对内、外控制回路进行校正,如图3所示。

图3 “滞后-超前”校正环节结构图
图中:T1为超前校正的参数,T2为滞后校正的参数,β为校正参数。超前校正通过增加系统带宽,来改善控制系统的快速性和超调量;滞后校正以控制系统带宽减小和阶跃响应快速性下降为代价,来换取超调量及稳定性的改进。“滞后-超前”校正综合了两者优点,可以使被控制系统的响应速度加快,超调量减小,并较好地抑制了高频噪声[9-10]。
基于频域法设计“滞后-超前”校正环节参数的步骤如下:
① 根据未校正系统的伯德图和稳态性能指标,合理的选择校正后系统的截止频率ωc;
② 确定校正参数β;
③ 先设计滞后校正部分的参数T2;
④ 再根据已经选定的β设计超前部分的参数T1;
⑤ 将滞后和超前部分的传递函数相乘后得到滞后-超前校正的传递函数,绘制校正后的伯德图,检验系统性能指标是否符合要求,如果不符合则调节校正环节参数后重新检验。
(3) 反馈环节处理。控制子模块C4为位置跟踪外回路的提供反馈信号。由安装在稳定平台基座上的GPS和姿态陀螺仪得到基座在惯性坐标系OiXiYiZi下的方位、俯仰和横滚3个方向上的姿态角的数值(γbi,θbi,φbi);由光电编码器测量可以得到目标视轴在载体坐标系ObXbYbZb下的方位、俯仰和横滚3个方向上的姿态角数值(γrb,θrb,φrb)。根据天线平台坐标系OrXrYrZr到载体坐标系的变换矩阵Trb以及载体坐标系到惯性坐标系的变换矩阵Tbi可以求出天线平台坐标系到惯性坐标系之间的坐标系的变换矩阵,即:
(3)
经过坐标变换运算后,可以得到当前时刻,目标视轴在惯性坐标系下的姿态角数值(γri,θri,φri)。最后,将其作为位置跟踪外回路的反馈信号,可求得与C1输出姿态角的指令(γgi,θgi,φgi)之间的差值(Δγgi,Δθgi,Δφgi),即当前目标视轴和所设定目标视轴跟踪线之间的夹角,作为控制系统的输入以构成闭环控制。

1.3仿真验证
以某被跟踪的目标为固定目标为原点,设置载机按如下的航迹做飞行运动,载机在惯性坐标系下的运动方程为:

(4)
在载机的俯仰和横滚轴上分别加入幅值为5°,频率为0.2 Hz的干扰摇摆角运动,在方位轴加入幅值为2°频率为0.1 Hz的干扰摇摆角运动。仿真时间t设为500 s,并在角位置和角速率反馈信号中加入一定量的模拟实际运行过程中的噪声干扰信号环节。在Matlab中对稳定平台在横滚,俯仰和方位3个方向上的跟踪误差输出进行仿真,并截取运行稳定后100~200 s内的输出值曲线,如图4所示。
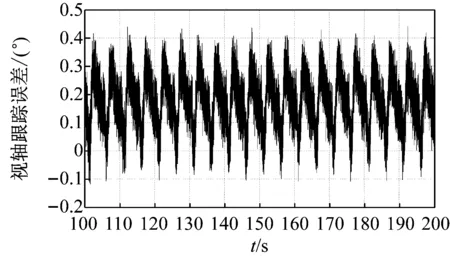
(a) 方位姿态角跟踪误差曲线

(b) 俯仰姿态角跟踪误差曲线

(c) 横滚姿态角跟踪误差曲线
图4 目标视轴在3个方向上跟踪误差仿真曲线
根据仿真结果,当稳定平台随载机一同运动时,并受到干扰角运动的作用时,目标视轴在方位,俯仰和横滚轴上的最大跟踪误差分别为0.41°、-0.13°和-0.25°,满足稳定平台跟踪误差小于±0.5°的要求。
2 嵌入式系统设计
2.1嵌入式计算机模块
嵌入式计算机模块是整个控制系统的核心,采用基于80×86架构的32 bit微处理器,内置高性能的浮点运算单元,符合ANSI/IEEE 754标准[11],适合于稳定平台中各坐标系之间转换的高速运算。CPU板上集成了ADC、DAC、实时时钟、看门狗、PWM、E2PROM、SRAM/Flash、RS-232/485/422串行接口和可编程I/O口等功能单元。便于嵌入式计算机实时采集各类传感器的反馈数据,并输出命令至伺服放大器。以嵌入式计算机模块为核心的功能结构如图5所示。

图5 嵌入式计算机功能结构图
2.2电子控制器
电子控制器中包含了嵌入式计算机、扩展接口、光电编码器信号调理电路、伺服放大器和电源转换器等设备。由于体积所限,电子控制器放置在由铝合金材质加工而成并具有抗电磁干扰能力的一种专用小型航控电子设备箱[12]中,如图6所示。


图6 电子控制器实物及组成结构图
2.3光电编码器及调理电路
采用LFA-500A-18000型高精度增量式光电编码器,分别测量方位、俯仰和横滚3个轴系的角位置值。测角信号采用差分信号方式输出[13],经差分接收芯片MC3486转换为单端信号。随后输入调理电路的CPLD内,经倍频判向、计数器、数据接口和控制逻辑等内部电路处理后得到24位二进制格式的角位置值;最后由嵌入式计算机模块通过3组24位数字量输入接口,依次读入各轴系的光电编码器调理信号,经标度转换和运算处理后,得到3个轴系的实时角位置反馈值,构成角位置回路的闭环控制。
2.4GPS接收机
采用Septentrio公司的POLARX2@,基于高性能的GNSS处理芯片,具有低信噪比的优点。不仅可以提供高精度的位置和速度输出,还可以提供精确的方向、横摇、纵摇等姿态测量结果,输出测量值的更新频率为10 Hz[14]。GPS接收机安装在平台基座上与载机保持固连,采用了一根双频主天线和一根单频副天线,两根天线分别安装在横杆的两端。控制系统通过GPS接收机可获得载机在惯性坐标系下的实时位置信息,包括:经度、纬度和高度等数据。
2.5角速率陀螺
采用CrossBow公司的VG400CD垂直光纤陀螺。采用集成光路技术,功耗低,信号稳定,耐冲击震动,具有较宽的动态范围[15]。VG400CD采用27 V直流电源供电,通过RS-232串口以9 600 bit/s的波特率与嵌入式控制计算机进行串行通信。垂直光纤陀螺安装在被稳定平面上,用来测量被稳定平面在3个轴系方向上相对于惯性空间运动的角速率,作为反馈信号以构成角速率回路的闭环控制。
2.6机体航姿传感器
采用TPW-1H型机体航姿传感器。其测量精度为(5',输出姿态角度漂移绝对值不大于1.5°。航姿传感器与载机固连,在飞行过程中可获得载机在惯性坐标系下的方位、俯仰和横滚轴3个自由度上的方向角,作为位置跟踪外回路反馈环节的输入信号,以提高控制系统的动态响应性能。
3 控制系统软件设计
稳定平台的控制软件采用模块化设计方法,由主控制程序、实时处理循环子程序、串行通信子程序和地面测控计算机软件4个部分组成。
3.1主控制程序
主控制程序的主要功能是对DI (数字量输入)、DO(数字量输出)通道、DA(数模转换)通道、各传感器设备接口进行初始化后与其进行串行通信连接;执行稳定平台的角位置初始化寻零操作;在控制系统中设置并利用高精度定时器执行各实时循环处理子程序等。主控制程序的工作流程如图7所示。
3.2实时处理循环子程序
实时循环处理子程序的主要功能是采集并处理各种外部传感器的信号,包括:各轴系的光电编码器的角位置数值、被稳定平面上所安装的角速率陀螺信号、GPS接收机的输出位置信息、机体航姿传感器姿态角信息等;控制稳定平台按照给定的工作方式运行;根据坐标系变换实时计算出在各种工作方式下的实际天线视轴指向与被跟踪目标位置之间的偏移量;完成角速率稳定回路和角位置跟踪回路的校正运算;经过DA信号转换后输出到伺服功率放大器。实时循环处理子程序的流程如图8所示。

图7 控制系统主程序流程图

图8 实时循环处理子程序流程图
3.3串行通信子程序
串行通信子程序主要是利用控制系统中配置的多个串口与不同的外部传感器设备进行通信,实时传输载机和稳定平台的姿态位置数据,包括:与垂直光纤陀螺、机体航姿传感器、GPS接收机,并通过无线电载波方式与地面测控计算机交换命令和数据等信息。采用自定义通信规约,规约内包含当前的姿态、位置和空速等信息。每个数据包采用14个字节的定长帧结构,分为两帧,每个帧的组成结构和具体含义如表1和表2所示。

表1 数据包第1帧组成结构

表2 数据包第2帧组成结构
3.4地面测控计算机软件
地面测控计算机软件由微软公司标准可视化开发工具Visual Studio2008开发,运行在Windows XP操作系统下,以图形和数据的方式实时显示当前的载机姿态和稳定平台的运动状态、位置、速度、姿态和空中/地面的目标坐标值。软件中集成了地平仪控件(GMS Aircraft Instruments ActiveX Control),可以设置并实时模拟显示载机在俯仰、横滚和航向角上的飞行姿态;使用地图控件(Map Control),实时显示载机的飞行航迹。软件界面如图9所示。

图9 地面测控计算机软件界面图
软件的功能主要分为遥控和遥测。遥控的功能主要有:① 选择并设定稳定平台的控制模式。② 设定被跟踪的地面目标或者空中目标的位置信息,包括:经度、纬度和高度值,并设置天线的极化角。③ 当平台工作在固定姿态模式下时,设置稳定平台的横滚、俯仰和方位轴的固定姿态角度。遥测的功能主要有:① 实时显示天线指令、实际姿态、转台指令、转台反馈和转台速率等指示稳定平台当前工作状态的参量。② 显示载机当前的横滚、俯仰和方位角姿态信息和纬度、经度和高度位置信息。③ 以图形方式实时显示稳定平台当前的转动角度值;④ 利用地平仪控件和地图控件显示载机在横滚、俯仰和航向上的姿态,并显示载机的飞行轨迹曲线。⑤ 当工作于地面摇杆操控控制模式下时,实时显示稳定平台在横滚、俯仰和方位3个轴系上的角速率数值。
4 目标跟踪误差验证试验
在稳定平台实际工作的现场环境中对稳定平台目标跟踪误差进行验证,如图10所示。

图10 现场试验图
试验方法是在距载机一定距离(例如1、2或5 km)之外,设定某一被跟踪的目标点,由摇摆机模拟产生10°/s的载机的干扰角运动,耦合到稳定平台的各轴系上,利用地面测控计算机软件实时地记录稳定平台目标跟踪误差的试验数据。图11表示当稳定平台工作在自动跟踪方式下时,各轴系隔离载机干扰角运动并稳定跟踪距载机5 km外某地面目标的角位置输出测试数据曲线。
由实验数据可以得出:当目标视轴稳定跟踪目标时,俯仰轴给定输出值应为48.982°,实际输出最大角度误差值约为-0.211°;横滚轴给定输出值应为1.012°,实际输出最大角度误差值约为0.311°;方位轴给定输出值应为-8.231°,实际输出最大角度误差值约为0.351°,满足了目标跟踪误差范围为±0.5°的要求。

(a) 俯仰轴试验数据曲线

(b) 横滚轴试验数据曲线

(c) 方位轴试验数据曲线
图11 自动跟踪5 km外目标各轴系的试验数据输出
5 结 论
采用嵌入式计算机作为核心的某型三轴系天线稳定平台控制系统,采用双回路控制模型,具有结构紧凑,功耗低,高速数据处理的优点。现场试验测试结果表明控制系统的性能达到了预期的设计要求。对机载型天线稳定平台控制系统的开发、研制和试验具有一定的参考意义。
[1] 沈晓洋, 陈洪亮, 刘 昇. 机载陀螺稳定平台控制算法[J]. 电光与控制, 2011, 18(4):46-50.
[2] 赵冠军, 赵嫔娅. 一种机载稳定平台伺服控制系统的设计与实现[J]. 科学技术与工程, 2010, 10(18):4570-4573.
[3] 冯佳佳, 邱国廷, 安庆勇,等. 惯性稳定平台力矩电机选择及驱动系统设计[J]. 现代防御技术, 2015, 43(4).
[4] 徐友清, 何云峰, 孙 罡,等. 基于DSP的稳定平台设计[J]. 现代电子技术, 2011, 34(21):157-159.
[5] 刘玉书. 基于ARM的车载稳定平台伺服控制系统的设计[D]. 西安工业大学, 2015.
[6] 孟海磊, 王志胜. 基于STM32的三轴车载稳定跟踪平台设计与实现[J]. 火力与指挥控制, 2013(12):164-166.
[7] 杨 睿, 韩 笑, 程桂林, 等. 机载稳定平台伺服系统故障分析及诊断方法研究[J]. 电光与控制, 2017(2):64-68.
[8] 王建宏, 唐得志. 飞行仿真转台速率稳定回路的H∞模型参考控制设计[J]. 伺服控制, 2012(3):52-57.
[9] 彭树萍, 李 博, 姜润强,等. 光电跟踪系统的双模控制[J]. 光学精密工程, 2016, 24(2):335-342.
[10] 薛乐堂. 车载光电跟瞄系统控制技术研究[D]. 长春:中国科学院研究生院(长春光学精密机械与物理研究所), 2016.
[11] Castillo A B. Design of single precision float adder (32-bit numbers) according to IEEE 754 standard using VHDL[J]. UniversitatPolitècnica De Catalunya, 2012.
[12] 蒋 尚, 张利清, 卢 阳. 一种电子机箱的结构设计研究[J]. 电子机械工程, 2016, 32(3).
[13] 王征宇, 章少云. 差分信号的测量方法[J]. 电子与封装, 2013(1):17-19.
[14] Kuylen L V, Boon F, Simsky A,etal. Attitude determination methods used in the PolaRx2@ multi-antenna GPS receiver[J]. Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation, 2005:125-135.
[15] 徐媛媛, 马小勇. 基于VG400CD-100的微惯性测量组合标定[J]. 机械研究与应用, 2014(1):184-187.
DesignofStabilizedPlatformControlSystemBasedonEmbeddedComputer
YANGRui,HANXiao,CHENGGuilin,YANGChenshun
(School of Electric Power Engineering, Nanjing Institute of Technology, Nanjing 211167, China)
For requirements such as small size, low power consumption, anti-interference ability and so on in control system of stabilized platform, a control system of three axes airborne stabilized platform based on embedded computer is designed. By using the principle of transformation among inertial coordinate system, carrier coordinate system and antenna platform coordinate system, a double-loop control system model is designed to isolate the carrier jamming angular motion and achieve stable target tracking. The effectiveness of control method is proved by simulation in Matlab. The key features including composition and connection of embedded computer module, selection and configuration of optoelectronic encoder, gyroscope, GPS and other inertial sensing components and the flow and function of main control program and the ground telemetry computer software are designed in detail. The field test results show that the target tracking error range meets the design requirement of ±0.5°.
stabilized platform; embedded system; coordinate transformation; double-loop control; target tracking error
TP 275
A
1006-7167(2017)09-0111-06
2016-11-21
南京工程学院校级科研基金项目(QKJA201502)
杨 睿(1982-),男,江苏南京人,硕士,实验师,主要从事稳定平台伺服系统控制技术方面的研究工作。Tel.:18151007390; E-mail: yrnjit@njit.edu.cn
