基于PSD的药柱位移测试系统的研究
2017-11-03夏忠海任勇峰贾兴中郭佳欣
夏忠海,任勇峰,贾兴中,郭佳欣
(中北大学电子测试技术国家重点实验室,太原 030051)
基于PSD的药柱位移测试系统的研究
夏忠海,任勇峰*,贾兴中,郭佳欣
(中北大学电子测试技术国家重点实验室,太原 030051)
榴弹水平发射时会产生高轴向过载环境,推进剂药柱在此环境中长度收缩变形产生过载位移。而PSD(Position Sensitive Device)是基于横向光电效应的光电位置敏感器件,具有位置分辨率高,响应速度快,处理电路简单等优点。就一维PSD位移测量原理和相关特点,以FPGA主控模块为核心,集信号调理、采集存储等功能于一体,创新性的设计了传感器与壳体一体化测量系统。文章就测试系统各个模块进行了说明并对测量数据进行了处理分析,采用多项式拟合曲线,提高了系统的测量精度;经过高过载实验,验证了系统的可靠性和稳定性,为药柱位移测试评估方法的建立提供了可靠的实验数据。
PSD;药柱位移;FPGA;多项式标定;高过载
固体推进剂药柱是一些增程炮弹的能源动力和主要结构部件,当炮弹处于发射状态时,药柱受加速度载荷作用从前端面产生变形伸长[1],伸长量不断积累导致了尾端面轴向收缩而产生位移,即过载位移。因药柱的拉伸模量低,过载位移的发生易造成药柱结构失效破坏,从而会影响炮弹的弹道性能和气动特性。为了获取高过载下推进剂药柱位移数据,建立药柱位移测试评估方法,需要研制药柱位移测试系统。
传统测距法有非光学测量法和光学测量法,因为光学测量法具有测量简单、测量精度高的特点,被广泛应用于测距系统中。而PSD是一种基于横向光电效应的非分割型光电二极管,根据光敏面上接收到光信号转变为电信号的变化来检测光点位置。由于其具有很高灵敏度和良好的瞬态响应特性以及紧凑的结构,而广泛应用于光电位置测量、位移、航空对接和长直导轨检测等方面[2]。为测量药柱在发射过载状态下的轴向过载位移,首次将PSD安置于测量壳体上,设计了抗过载的传感器与壳体一体化,采集存储一体化测量装置,解决了传统测距方法的安装特性与测量装置体积要求之间的矛盾。
1 硬件电路设计
试验装置利用了现有的炮弹的弹壳,分别在不同部位对两个原弹壳进行切割和加工,得到试验装置的前壳体和后壳体,将设计的测量装置,通过抗过载工艺安装于炮弹内部,分别通过螺纹与前后壳体相连接。
采用火炮水平发射上述试验装置,200 m水平直射弹道,经回收后拆解试验装置,其中测量要求轴向过载不大于15 000gn,旋转角速度约为4 000 r/min,过载作用时间约为10 ms量级,根据动态测量参数的要求与研究,设置单通道采样率为100 ksample/s,硬件方案实现原理框图如图1所示。
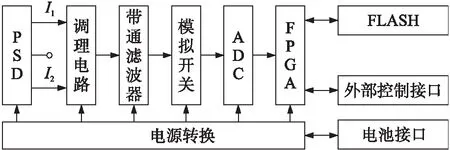
图1 应变信号采集原理框图
系统以FPGA主控模块为核心,完成对每路信号的采集、存储以及命令的检测与控制等工作。PSD信号经过带通滤波器滤波后进入模拟开关输入端,待选通相应的转换通道后进行ADC采样,输出信号经过打包处理并实时送到FLASH中进行存储。上位机通过USB读取存储器中的数据后进行相应处理并绘制位移图形,显示测量位移值。
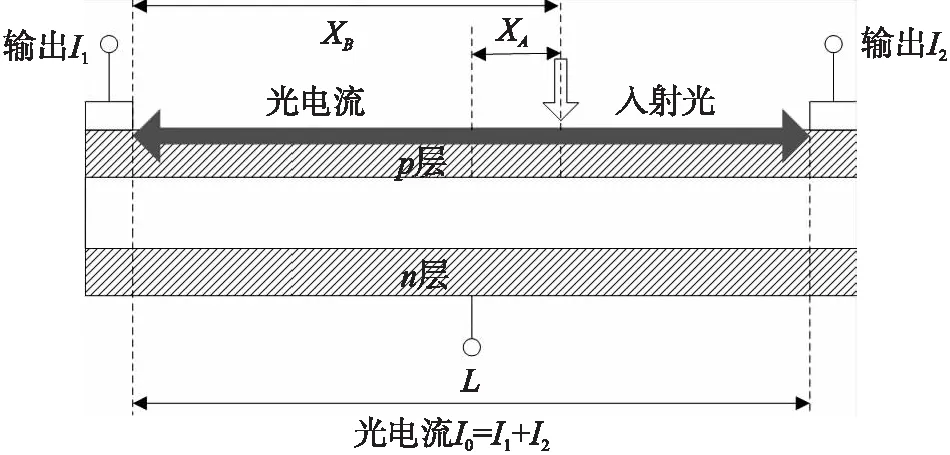
图2 一维PSD结构示意及测距原理图
2 主要模块设计
2.1 PSD测距原理及安装特性
PSD工作机理是以PN结的横向光电效应为基础的,如图2所示为一维PSD,P层为光敏层,同时也为导电层,其阻抗均匀分布[3]。当P层被光照射时,由于横向光电效应,在平行于结平面的方向产生光电流,并被P层两端的电极收集。
根据PSD的Lucovusky方程[4],当PSD几何中心设定为坐标原点时,测量位移为

(1)
当PSD一端设定为坐标原点时,测量位移为

(2)
本设计中使用一维PSD-2534型,其光敏感面为一细长结构,有效面积为2.5 mm×34 mm,分辨率为1 μm,最大响应时间为5 μs,响应光谱为380 nm~1 100 nm,为测量方便,将其一端设定为坐标原点,实物图和安装图如图3所示。

图3 高精度PSD位置传感器及安装
安装时,在测量装置表面铣出一个透光槽,将一维PSD位置传感器敏感面紧贴着细槽,使得另一侧的光源发出的光能够通过透光槽照射至传感器的敏感面上。当小型炮弹发射时出现瞬间高过载环境,测量装置中的药柱在此情况下会因长度收缩而产生过载位移;当出现过载位移前,药壳上的红外激光灯因药柱遮挡而无法通过透光槽照射到PSD上;过载瞬间,过载位移发生,使得红外激光灯通过透光槽照射于PSD上产生相应的电流信号,同时由于PSD敏感面安装于装置内部,通过采集过载位移前后的信号并计算其差值来解决因背景光及暗电流对PSD输出造成的误差。
2.2 调理电路模块
PSD 输出的信号为电流信号,首先将其转换成易于处理的电压信号,为后续信号的方便处理,选用反向I/V转换电路。
根据上述位移测量方案,测量装置需要均匀发散的光作为指示光源,均匀光通常可以通过将点光源放于凸透镜的焦点上来获取,最终选取RJH-730G-R1型号的红外LED灯珠作为测量装置的指示光源,其波长范围为725 nm~735 nm,根据图4可知,此时的PSD光电转换效率约为0.46 A/W。而LED灯珠亮度为160 mW左右,发光角度120°,照射到PSD的有效功率不超过2 mW,故此时PSD各极点电流不到1 mA;后续采用的ADC参考电压为2.5 V,这样可知I/V转换电路放大倍数达到上千倍。
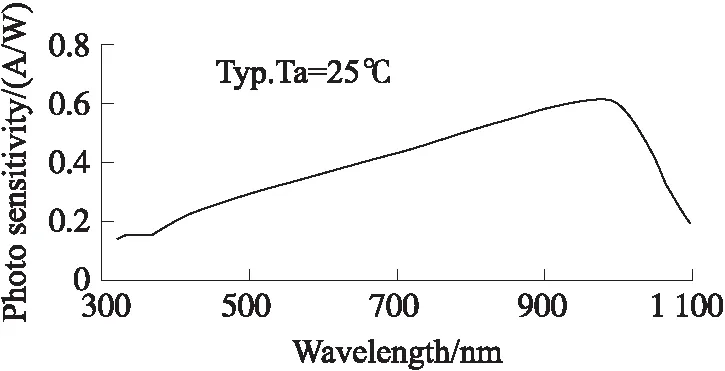
图4 PSD的光电效率随波长的变化曲线图
由于输入电路的电流非常小,故需要I/V转换电路中的放大器有较小的输入偏置电流和输入零漂电压、较大的输入阻抗。同时,设计电路时应该尽量避免用大电阻直接进行转换,否则会引入较大的噪声和误差。基于以上考虑,选用四运放的AD824ARMZ,其失调电压为0.1 mV,输入偏置电流为2 pA,失调电压温漂2 μV/℃[5],通过两级放大实现I/V转换,其中一路信号调理如图5所示。
图5中,反馈电容C14的作用是使电路稳定并有约为45°的相位容限,可消除振荡。

图5 PSD信号调理电路
2.3 滤波模块
为了消除各种高、低频干扰信号,而只保留有效信号,需要设计一个窄带高速带通滤波器。因为所有可用的滤波器的机构最后都受到运放带宽的制约,显然,尽量减少运放的数目可以达到最高频率的带通响应。无限增益多路反馈滤波电路参数计算简单,网络元件个数少,不存在正反馈,噪声较小,稳定性高,因此设计二阶无限增益多路反馈(MFB)带通滤波器对信号滤波。
单位增益带通滤波器的传递函数[6]为

(3)
中心频率为
(4)
品质因数为

(5)
设膛压引起药柱对壳体的应变频率为5 kHz[7],设置单位增益带通滤波器的中心频率fc=5 kHz。因为对于位移量来说,较高频率(高于5 kHz)的信号对其计算没有任何的意义,为此设计Q=5,即带宽BW=fc/Q=1 kHz的窄带带通滤波器。查阅二阶MFB带通滤波器设计用表[8]选择C1=C2=0.01 μF,根据电阻换标系数公式

(6)
得换标系数K=2。
查表可得归一化电阻值,r1=7.958 kΩ,r2=0.162 kΩ,r3=15.915 kΩ。对归一化电阻值分别乘以电阻换标系数得R1=15.916 kΩ,R2=0.324 kΩ,R3=31.83 kΩ,根据标称电阻值得实际选用电阻为R1=16 kΩ,R2=324 kΩ,R3=31.6 kΩ,所设计带通滤波器如图6所示。
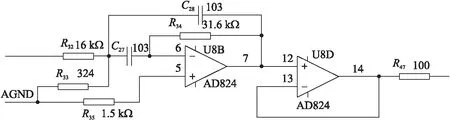
图6 二阶MFB带通滤波器
通过Multisim 14.0建立MFB滤波器的仿真图,并用AC Analysis分析观测电路的幅/相频特性,如图7所示,可以看出其带宽为5.6 kHz-4.6 kHz=1 kHz,且具有很强的频率选择性。
2.4 采集存储模块
在采集信号经过模拟开关ADG706时,由于运放AD8608驱动容性负载能力有限,约为200 pF,为防止采集信号发生过冲和振荡[9],在AD8608后加一小电阻,经过Multisim 14.0仿真和实验表明当其驱动容性负载为1 000 pF左右时,选用电阻为100 Ω(图6R47)时能很好的改善过冲的发生。
信号采集传输链路中,AD建立时间将对采样频率与采样精度产生影响,故其建立时间必须足够快,以确保转化误差最小化,设计中采用AD8011。为使得采集系统在不降低采样精度的前提下,优化采样时序[10]。一般采样时,先切换模拟通道,在等待模拟开关稳定之后再进行AD转换,待完成数据转化,再次切换模拟开关进入下一通道采集。而采用先采样后切换模拟开关的模式,使模拟开关及跟随运放的建立时间在AD转化过程中实现。如图8所示,这样能使模拟开关及跟随运放的建立时间的开销完全在转换过程中完成,从而保证了模数转换前此通道信号的稳定,且模拟开关和跟随运放不会对信号转换产生额外的误差。
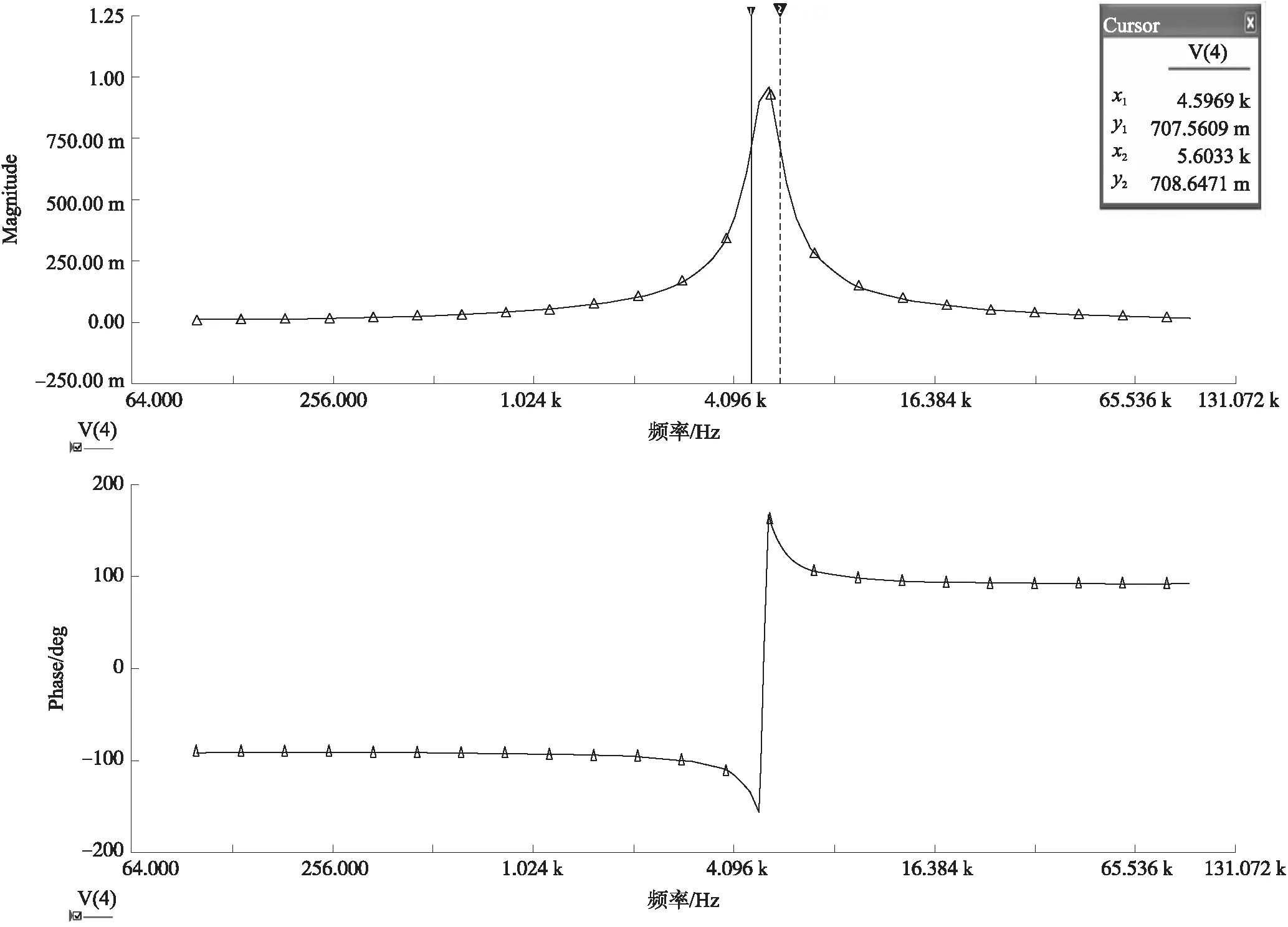
图7 交流分析法得到的幅/相特性曲线

图8 优化采集模拟开关切换时序产
图8中,Covst为采集控制信号,Addr为模拟开关地址,Wrfifo为写FIFO信号,Data为采集数据。
在采集状态下,对采集输出信号进行打包,并将实时数据写入到存储模块中,存储单元选用选用MICRON公司的 MT29F64G08AFAAA,容量为8 Gbyte的NAND FLASH芯片。采用交替双平面页编程方式,存储速率能够达到 29.85 Mbit/s。为了能安全、可靠存储,采用两片Flash进行数据存储,从时间上看两个数据流同时流入两片Flash中,相当于数据总线增加了一倍,数据存储速率能够达到单片Flash存储速率的两倍。双备份的存储模式保证对每路数据源的可靠存储。
2.5 系统供电模块
高过载测量的特殊环境决定了采集存储装置设计的难度,而高过载过程中能否对采集存储装置进行可靠的供电,保证整个高过载测量过程的进行成为了试验成功的非常重要因素。针对现有高过载电子记录装置的供电模块在瞬态高过载时无法实现不间断供电的问题,设计了一种组合互补式瞬态高过载不间断供电模块,如图9所示。

图9 组合互补式瞬态高过载不间断供电模块
设计中Li电池正极通过二极管与充电输入接口相连,两组银锌电池为备份电池组,供电电池组与备份电池组在壳体内按不同轴向放置。在受到瞬态高过载时,由于电池组的安装方式与选择的电池种类不同,故其在壳体内断电或损坏的特性与时间也是不同的,从而形成了互补式的供电拓扑,保证了电子记录装置在高过载时的不间断供电。
若连接电池组二极管的负端突然断开或与地短路,此时储能电容C57、C58将存储能量继续供给芯片。若设定瞬态高过载时,电路掉电时间t最大为2 ms,实验测试电路电流40 mA,LT1763-5最低工作电压为Vpm为5.5 V,电池组供电电压Vs为8.4 V,RB551V-30压降为0.36 V,供电电路截止工作电压为
Vm=Vpm+VD8+IR52
(7)
正常供电电压为
Vw=Vs-VD3
(8)
储能电容保持期间的电能为

(9)
瞬态供出的电能为
(10)
由能量守恒即式(9)与式(10)相等得
(11)
计算得C为46.2 pF,选用107的电容可满足实际需求,同时满足侵彻时间更长的需求。

图10 采集数据打包存储帧格式
3 上位机设计
上位机软件设计采用自顶向下、逐步细化的模块化设计。主要完成试验测试电路的参数设置以及装置回收后存储器中数据的读取、保存和波形显示。首先,无红外激光灯照射时对处理器进行初始化,根据A/D采样时序,启动A/D 转换,采集PSD暗电流输出值并保存。红外激光灯照射PSD 后,采集到PSD的输出值减去保存的暗电流输出值,并绘制位移波形图,显示光点移动的位移即药柱过载位移值,从而避免了暗电流对PSD输出的影响。上位机读取打包的数据如图10所示。
4 系统非线性校正
位移标定试验示意图如图11所示,使用铝柱模拟药柱的位移情况,其表面颜色与直径都与实际药柱保持一致,测量装置靠近PSD的一端内壁涂抹黑色吸光材料,以减少因反射光给测量带来额外的误差,标定盖与上述压力标定时预留的安装螺纹连接,其表面刻有角度,螺杆螺纹为M8×1.25,杆上做有标记以便与标定盖上的角度对应,则螺杆每相对标定盖旋转360°,铝柱的位移为1.25 mm,通过控制螺杆旋转的角度即可精确控制铝柱的位移量。
根据系统测试及式(2)推得位移计算值为

(12)
将实际位移Y、计算位移X和PSD两极电流信号采集数字量为WY1、WY2填入表1中。

图11 位移标定试验图
表1中未列出位移2.5 mm以下测量值,因采集纹波及两电流信号调理电路不完全对称等因素影响,2.5 mm以下测量失真,而在测量装置应用背景下,药柱在6 000 g~12 000 g的发射轴向过载环境下,药柱端面位移量应在几毫米乃至十几毫米,因此标定位移范围选择2.5 mm~30 mm完全满足设计要求。
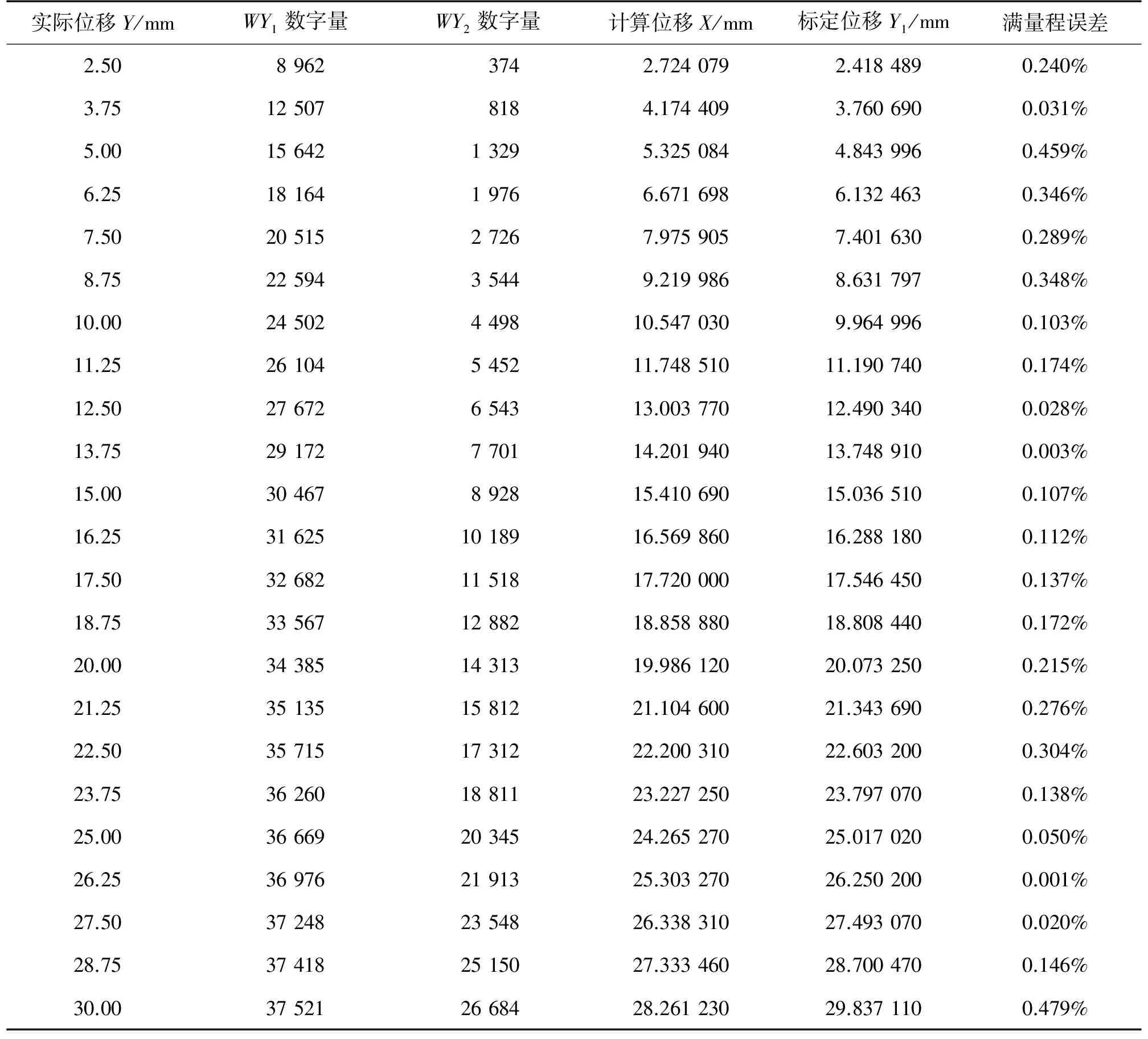
表1 测试数据记录表
将计算位移X和实际位移Y拟合曲线如图12所示,将计算位移X代入拟合公式中可计算出标定位移Y1并将其填入表1中。

图12 计算位移与实际位移拟合曲线图
多项式拟合误差为[11]

(13)
式中:Δ=|Y1-Y|max,Y1为拟合输出的标定位移,Y为实际位移,Rm为PSD满量程位移,计算式(13)得
最大拟合误差为0.479%,也表明了PSD系统输出的非线性误差。采用多项式拟合曲线来标定数据,使得标定曲线与PSD输出特性保持一致,提高了系统的测量精度。
5 实验验证
为模拟药柱的瞬间高过载,使用SY10-100液压冲击试验台,试验标准为GB_T2423_5,标准脉冲宽度0.30 ms,冲击高度800 mm,冲击采样频率192 kbit/s,采样时间1 600.00 ms,实际操作如图13所示。
图13(b)为采集的高轴向过载模拟药柱的过载位移,其中WY1和WY1为采集到的两路PSD位移信号,WY经过式(12)计算后绘制出的位移波形,纵轴表示位移(单位mm)。经过多次冲击试验,波形都很好地测试出了过载脉冲宽度和药柱瞬间的过载位移,从而验证了系统的稳定性与可靠性。
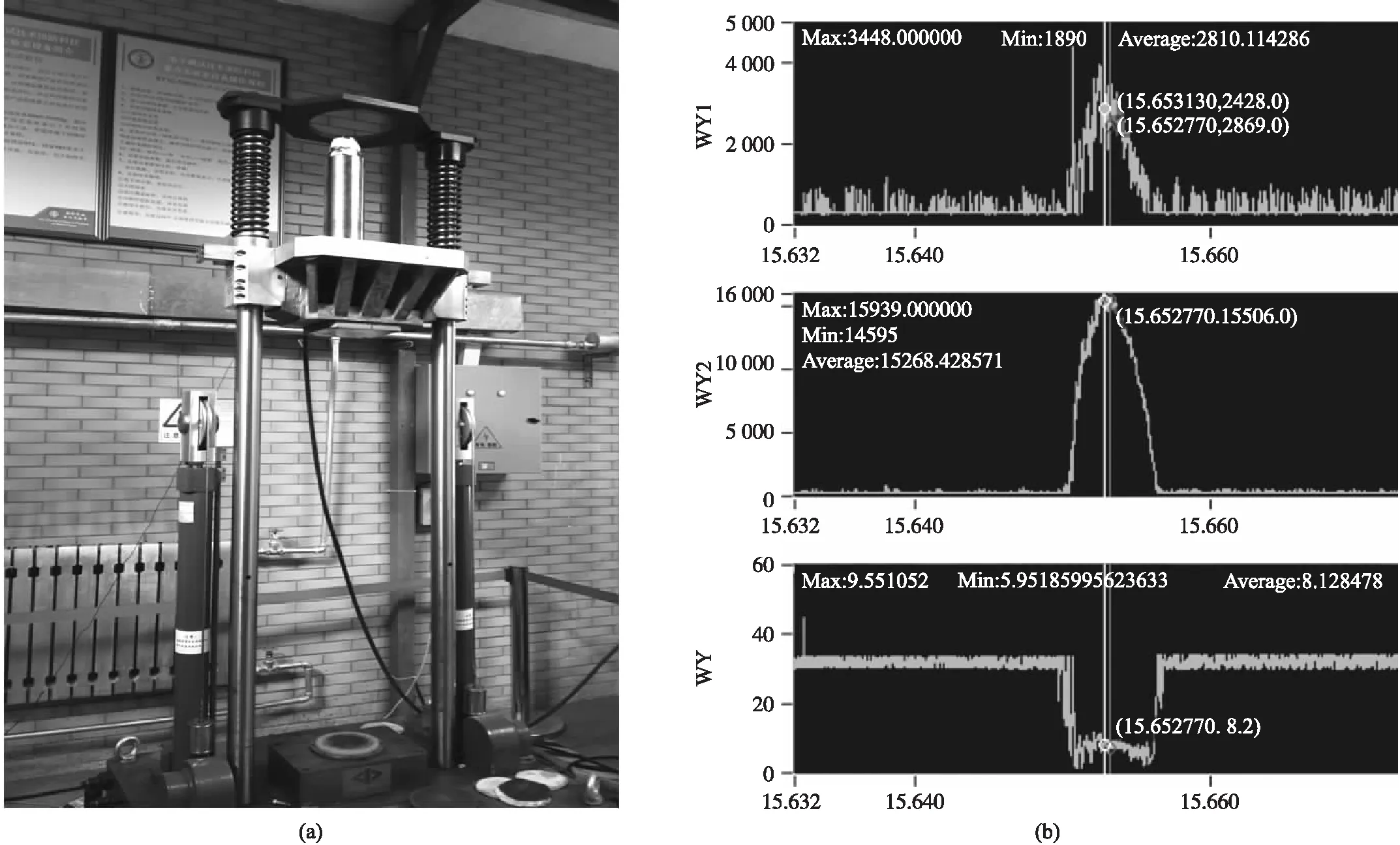
图13 11 000 gn轴向过载模拟药柱过载位移
6 总结
为测量药柱在发射过载状态下的轴向过载位移,将PSD安置于壳体上,设计了传感器与壳体一体化测量系统,文章就测量系统各个模块进行了详细说明分析,并通过仿真验证了理论设计。采用PSD测量位移,对采集数据作了详细处理分析,经过标定,提高了系统的测量精度。最后模拟装药发射过载环境下的测试,结果表明,测量系统在高过载条件下稳定可靠,为推进剂药柱位移测试评估方法的建立供了可靠的原始检测数据。
[1] 朱卫兵. 固体火箭发动机药柱结构完整性及可靠性分析[D]. 哈尔滨:哈尔滨工程大学,2005.
[2] 刘剑锋. PSD定位理论及其在引信中的应用研究[D]. 南京:南京理工大学,2002.
[3] 李旷野. 基于PSD的高精度位移传感器的研究[D]. 长春:长春理工大学,2010.
[4] 宋殿友. 精密PSD微位移在线测量技术的研究与应用[D]. 天津:天津大学,2012.
[5] AD824 Single Supply,Rail-to-Rail Low Power FET-Input Op Amp InData Sheet[R],2003.
[6] 约翰逊D E. 有源滤波器精确设计手册[M]. 第1版. 北京:电子工业出版社,1984:138-139.
[7] 李政清. 微小型电容式压力测试仪的研究[D]. 太原:中北大学,2012.
[8] 塞尔吉欧·佛朗哥. 基于运算放大器和模拟集成电路的电路设计[M]. 第3版. 西安:西安交通大学出版社,2009:121-123.
[9] 张传民. 某弹载多通道数据采集系统的研究与设计[D]. 太原:中北大学,2015.
[10] Chu Chengqun,Ren Yongfeng,Liu Xin,et al. An Efficiency Multiplexing Scheme and Improved Sampling Method for Multichannel Data Acquisition System[J]. International Journal of Distributed Sensor Networks,2015,2015:.
[11] 费业泰. 误差理论与数据处理(第6版)[M]. 北京:机械工业出版社,2010:55-56.
ResearchoftheGrainDisplacementMeasurementSystemBasedonthePSD
XIAZhonghai,RENYongfeng*,JIAXingzhong,GUOJiaxin
(National Key Laboratory for Electronic Measurement Technology,North University of China,Taiyuan 030051,China)
It will produce high axial overload environment when the grenade launches in a horizontal state,and the propellant grain length contraction deformation will lead to the generation of overload displacement in this environment. The Position Sensitive Device based on the lateral photoelectric devices of the photoelectric position is sensitive,and it has a high position resolution,fast response,simple processing circuit,etc. In this article,discussing the principle of one-dimensional PSD displacement measurement and its related features,the FPGA master control module is taken as the core to set signal conditioning,acquisition and storage functions in one,and innovates on design of the integrated measuring system of sensor and to housing. The paper discusses the test system modules,processes and analysis of innovation on the measurement data at the same time,the polynomial fitting curve is adopted to improve the measurement accuracy of the system. From the high overload test experiment the system is reliability and stability. It provides a reliable experimental data for the establishment of the evaluation method of the displacement of the grain.
PSD;grain displacement;FPGA;polynomial calibration;high overload
10.3969/j.issn.1005-9490.2017.05.028
2016-07-05修改日期2016-07-06
TP274
A
1005-9490(2017)05-1196-08
夏忠海(1989-),男,山西朔州人,山西省中北大学仪器与电子学院硕士研究生,主要研究方向为电路与系统,hai7029@163.com;

任勇峰(1968-),男,山西中阳人,教授,博士生导师,主要从事动态测试、弹载固态记录器等方面的研究;

贾兴中(1984-),男,硬件工程师,从事电路与系统研究;

郭佳欣(1992-),女,硕士研究生,从事测试计量技术与仪器的研究。
