基于GPU并行计算的图像去噪研究
2017-11-02刘小豫李红咸阳师范学院图像处理研究所咸阳7000
刘小豫, 李红(咸阳师范学院 图像处理研究所,咸阳 7000)
基于GPU并行计算的图像去噪研究
刘小豫1, 李红2
(咸阳师范学院 图像处理研究所,咸阳 712000)
为更好保留经图像去噪后的特征信息,提高图像去噪计算速率,结合非局部均值算法的原理,提出了一种基于GPU并行计算的图像去噪方法。为了更好的保存去噪后的图像信息,采用欧氏距离与邻域相关系数结合方法,对邻域间相似性进行衡量;为提高算法执行速率,将图像复制到GPU内存,将计算结果复制到主机,从而节约主机开销。对添加不同噪声水平的噪声图像进行测试,结果表明,提出的算法在图像相干斑抑制和计算速率方面都有明显的优势。
图像去噪; 邻域相关系数; 高斯噪声; 并行计算; 非局部均值
0 引言
图像作为人们传递信息的重要载体,在生活中扮演着日益重要的角色,特别是计算机视觉技术、图像处理技术等更是深入到人们日常生活领域。而图像去噪作为图像处理的基础环节,其处理质量将直接决定后续工作的好坏,如边缘检测、跟踪识别、边缘检测等。因此,图像去噪通常被看成是图像处理领域中的重要工作,并对其进行了大量基础性的研究。如当前应用比较广泛的非局部均值滤波方法(non-local means,NLM),该方法是由Buades等在2005年的时候提出的,主要用于去除图像中存在的白噪声。该方法的原理是利用图像领域间存在的自相似性构造权重,进而恢复原始图像。通过实验结果证明,该方法与传统的均值滤波算法、双边滤波等相比,具有明显的优势。但随着非局部均值算法的应用,其缺点也逐步暴露出来,如计算效率慢、图像结构失真,不利于后续的图像处理工作。为提高计算效率,文献[1]提出一种减少搜索区域的方法;文献[2]则提出降低图像的维度,将d维图像块投影到一个低维的空间之中,从而减少权重计算的复杂度;文献[3、4]则提出对图像数据结构进行优化,从而提高检索的效率;文献[5]则提出利用像素点权值计算的对称性原理,从而减少对权重的计算量,提高计算速率。在上述研究的基础上,本文则提出一种基于GPU并行计算的图像方法,在引入领域相关系数后,借助GPU并行计算优势对算法进行设计。
1 噪声模型
在对图像进行传输过程中,不可避免的会在图像中引入噪声。针对图像噪声和图像信号是否相关的问题,研究中通常将图像噪声分为乘性噪声和加性噪声,同时大多数的情况下认为噪声和信号不相关。因此,将噪声模型定义为式(1)。
v(i)=x(i)+f(i)
(1)

2 非局部均值图像去噪算法
给定1幅含噪声图像v={v(i),i∈I},其中I表示为图像域,对图像中的任意一个像素点i都可以通过非局部均值滤波算法进行去噪,并对所有像素点的加权平均替换噪声像素,从而达到降噪的目的。具体计算为式(2)。

(2)
其中,w(i,j)表示权重,主要依赖于像素i和像素j的相似性,同时满足0≤w(i,j)≤1,以及∑jw(i,j)=1。而像素i和像素j是由灰度矩阵Ni和Nj决定,其中Ni表示以像素i为中心的图像区域,而Nj则表示以像素j为代表的图像区域,根据欧氏距离公式,可以求解得到两个像素点的相似度为式(3)。

(3)
其中,β表示大于零的高斯核标准差。
而根据上述的相似度距离公式可以看出,当邻域间灰度值矩阵越相似,那么其对应的像素点在加权平均当中所占的权重也就越大。由此则有权重计算为式(4)。
(4)
其中,h表示控制滤波程度系数,主要控制衰减速度。
3 非局部均值算法的改进
根据非局部均值算法的原理,通过高斯加权的欧氏距离公式可很好的度量不同像素点邻域间的相似性。但文献[6]通过仿真比较发现,当图像中的噪声过大的时候,对于图像中包含的信息丰富区域,很容易出现相似度低的邻域因为欧氏距离加大而被赋予较重的权值的问题。因此,这种问题很容易抑制不了相干斑问题,并达不到对细节信息保留的目的,最终出现信息丰富区域的信息失真。对此,围解决该问题,提出在传统的非局部均值算法中引入邻域间相关系数。具体定义如式(5)。
(5)

在为改进的非局部均值算法中,邻域间的灰度矩阵是通过欧氏距离来衡量。当距离越小,说明其相似度也就越大。同时公式(5)中的CR(i,j)∈[-1,1],而为了保证CR(i,j)与高斯加权距离公式的一致性[7],将邻域灰度矩阵间的相似参数定义为式(6)。
(6)
将相似参数与高斯加权欧氏距离结合,得到新的度量参数,并得到新的欧氏距离,求解为式(7)。
(7)
然后将式(7)带入到式(2)中,对图像进行去噪。
4 GPU并行方案设计
根据上述的改进算法可以看出,假设每计算一次权值和所耗费的时间复杂度为1,那么对于一幅图的所有像素点来讲,其权重的时间复杂度则为O(size×l×m)。而随着图像规模的不断增加,其计算的时间复杂度也会成倍增加,这必然会减慢计算的效率。为提高计算的效率,引入GPU并行计算思想[8-10]。具体思路是将像素点权重的计算放到一个线程中,那么并行后的算法就是对图像中像素点权重的计算同时操作,此时的时间复杂度为O(l×m)。具体技术方案为:将去噪图像处理放到GPU设备之中,再通过运算后将结果复制给主机,具体流程,如图1所示。
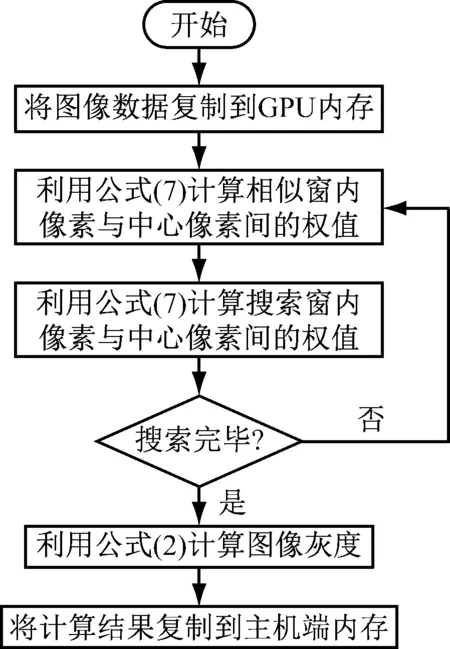
图1 基于GPU的并行改进非局部均值去噪算法
5 算法验证
为验证上述算法的优势,分别选择本算法与传统的非局部均值算法进行去噪比较。参数设置为:相似窗和搜索窗都设置为:6×6,像素大小为:256×256。
软件部分:
编程工具:viso studio 2012;运行平台:CUDA SDK;
硬件部分:CPU:4×Dual-CoreAMD;内存:32G;GPU:NVIDIA Quadro FX 4800;显存:1.5GB DDR4
在Lena图中加入高斯噪声,其原图和加入高斯噪声图分别为图2和图3所示。

图2 原图

图3 加入噪声图
5.1 去噪效果对比
将传统非局部均值算法和本文改进算法的去噪效果进行比较,可以得到对比效果图,如图4所示。
通过上述的效果图可以看出,经本文去噪后的图像的视觉效果要好于传统的算法,特别是在图像纹理和细节方面。
5.2 去噪速率比较
通过对上述图像的处理时间进行对比,可以得到的结果,如表1所示。

(a) NLM算法

(b) 本算法去噪效果
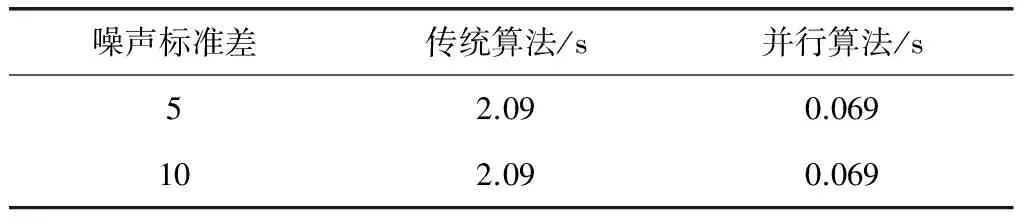
表1 不同算法处理时间
通过表1看出,本文改进的算法在去噪处理时间方面要远远小于传统算法,并提高了30.28倍。同时在不同的噪声标准差其处理的时间相同,由此可以说明改进算法在性能和处理效率方面都有很大的改善,满足对图像预处理的性能要求。
6 结束语
本文通过在传统非局部均值算法的基础上引入相关系数,并借助GPU并行计算的优势,对图像像素点权重和灰度进行计算。最后通过添加高斯噪声对图像进行测试,验证了本文提出的改进算法的优势,大大提高了计算效率,并减少了图像结构信息的丢失。
[1] Wang J H, Ge Y, Heuvelink G B M, et al. Spatial sampling design for estimating regional GPP with spatial heterogeneities[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(2): 539-543.
[2] van de Ville D, Kocher M. Nonlocal means with dimensionality reduction and SURE-based parameter selection[J]. IEEE Transactions on Image Processing, 2011, 20(9): 2683-2690.
[3] Fan B, Wang J T, Qin Y L, et al. Polar format algorithm based on fast Gaussian grid non-uniform fast fourier transform for spotlight synthetic aperture radar imaging[J]. Let Radar Sonar & Navigation, 2014, 8(5): 513-524.
[4] 王智文, 李绍滋. 基于多元统计模型的分形小波自适应图像去噪[J]. 计算机学报, 2014, 37(6): 1380-1389.
[5] 周兵,韩媛媛,徐明亮,李炜,裴银祥,吕培,周力为. 快速非局部均值图像去噪算法[J]. 计算机辅助设计与图形学学报,2016,8:1260-1268.
[6] 郭贝贝,易三莉,贺建峰,苗莹,邵党国. 改进的非局部均值滤波算法[J]. 计算机工程,2016,7:227-231.
[7] 单建华. 改进权值函数的非局部均值去噪算法[J]. 中国图象图形学报,2012,10:1227-1231.
[8] 董小社,刘超,王恩东,刘袁,张兴军. 面向GPU异构并行系统的多任务流编程模型[J]. 计算机学报,2014,7:1638-1646.
[9] 高明,程相国,咸鹤群,王硕,陈亚萌. 移动端代替算法的并行优化[J]. 青岛大学学报(自然科学版),2016,3:53-58.
[10] 卢风顺,宋君强,银福康,张理论. CPU/GPU协同并行计算研究综述[J]. 计算机科学,2011,3:5-9.
ResearchonImageDenoisingBasedonGPUParallelComputing
Liu Xiaoyu1, Li Hong2
(Institute of Image Processing, Xian Yang Normal College, Xianyang 712000, China)
In order to better preserve the image denoising feature information, improve the image denoising algorithm, combined with the principle of nonlocal means algorithm, an image denoising method based on GPU parallel computing is proposed. For better preservation of the denoised image information Euclidean distance and neighborhood correlation coefficient method are used to measure of similarity between fields. Secondly in order to improve the algorithm executing rate, the image is copied to the GPU memory, then the results will be copied to the host machine, thus the main overhead can be saved. Finally, the images with different noise levels are tested. The results show that the proposed algorithm has obvious advantages in image speckle reduction and computation speed.
Image denoising; Domain correlation coefficient; Gaussian noise; Parallel computation; Nonlocal mean
TP311
A
2017.01.02)
陕西省教育厅科学研究计划项目(16JK1823);咸阳师范学院专项科研基金项目(15XSYK044)
刘小豫(1978-),女,兴平人,讲师,硕士;研究方向:图像处理、信息系统开发.
李红(1976-),女,咸阳人,副教授;研究方向:图像处理与模式识别.
1007-757X(2017)10-0022-02
