利用海浪噪声自相关实现散射体无源探测∗
2017-10-23迟静李小雷高大治王好忠王宁
迟静 李小雷 高大治 王好忠 王宁
(中国海洋大学海洋技术系,青岛 266100)
利用海浪噪声自相关实现散射体无源探测∗
迟静 李小雷 高大治†王好忠 王宁
(中国海洋大学海洋技术系,青岛 266100)
提出了一种利用海浪噪声自相关实现散射体无源探测的新方法.将各接收器记录噪声信号的自相关减去所有接收器记录噪声信号自相关的平均值,得到散射信号的到达结构,然后结合基尔霍夫移位算法实现对散射体的探测.与利用背景噪声互相关提取格林函数从而实现散射体探测的方法不同,自相关无需考虑各个接收器之间的大量数据传输及时间同步问题,这为相距较远的多接收器和移动平台目标探测提供了极大的方便.将所提出的方法应用于实验数据中,最终探测结果与实际测量结果相比差别不大,验证了方法的有效性.
噪声自相关,散射体被动探测,安静目标
1 引 言
利用环境噪声进行被动探测具有隐蔽性高,能耗低等优点,最近几十年越来越成为人们关注的焦点.20世纪90年代,Buckingham等[1]开始在海洋声学领域研究利用海洋环境噪声探测目标的可能性,提出声日光成像(acoustic daylight imaging)的概念,并在实验中利用自制的声日光海洋噪声成像系统(acoustics daylight ocean noise imaging system,ADONIS)在8.5—75 kHz的频段成功地实现了不同形状散射体成像[2].2001年,Weaver和Lobiks[3]的超声实验证明:通过对两个传声器上记录的环境噪声进行互相关处理,可获得两点间的格林函数,等效于一个传声器作为虚拟声源发射信号,另外一个传声器接收.此后,这一方法在超声学[4−6]、地震学[7,8]、海洋声学等[9,10]领域迅速推广.
2008年,Snieder等[11]利用稳相估计的理论推导了当有散射体存在时两点间环境噪声的互相关结果,并指出该结果中可以获取散射体位置信息.2009年,Garnier和Papanicolaou[12]通过仿真验证了噪声互相关可以实现目标探测.2013年,Davy等[13]在消声混响腔实验中成功地利用宽带微波段热辐射的互相关结果实现了对厘米尺度棒状散射体的探测.2014—2015年间,中国海洋大学利用较为常见的公路噪声以及海浪噪声的互相关实现了对不同散射体探测[14,15].
利用环境噪声互相关结果对散射体探测非常依赖信号采集时各个通道的同步性,如果存在同步误差会使互相关结果出现时间漂移.当各接收器相距较远时,数据的实时传输及严格同步实现困难大,增加了远距离多接收器长时间探测的难度.为解决这一问题,本文提出了运用环境噪声自相关对散射体探测的新方法.由于采用自相关处理,各通道数据传输不必严格同步.另一方面,这种方法只需传输各个接收器一段时间内记录噪声信号的自相关结果,而非接收器采集的实时数据,这大大减少了实验过程中需要传输以及存储的数据量.因此该方法有望在远距离多接收器探测研究中取得突破.本文首先通过理论推导证明了利用环境噪声自相关提取散射体位置信息的可行性.然后将自相关的处理方法应用于石老人海水浴场进行的海浪噪声探测目标实验中,成功实现了对聚氯乙烯(PVC)圆筒的无源探测.
2 存在散射体时环境噪声自相关的理论推导
考虑开放空间中存在一闭合表面S,如图1(a)所示,假设散射体位于坐标原点,散射系数为fk(n,n′),n与n′分别表示入射及散射波方向.假设强度为q(ω)的噪声源均匀分布在半径为r的球面上,散射体位于球心,接收器位于rA处.散射体、接收器与噪声源位于同一平面,建立如图1(a)所示的坐标系,rA与r分别表示为:

则由r处点源激发,rA处的接收声场可表示为

(2)式中k=ω/c,ω表示噪声源角频率,c表示介质中声速,G(rA,r)表示噪声源rA与接收器r之间的格林函数.所以rA处接收声场的自相关结果为
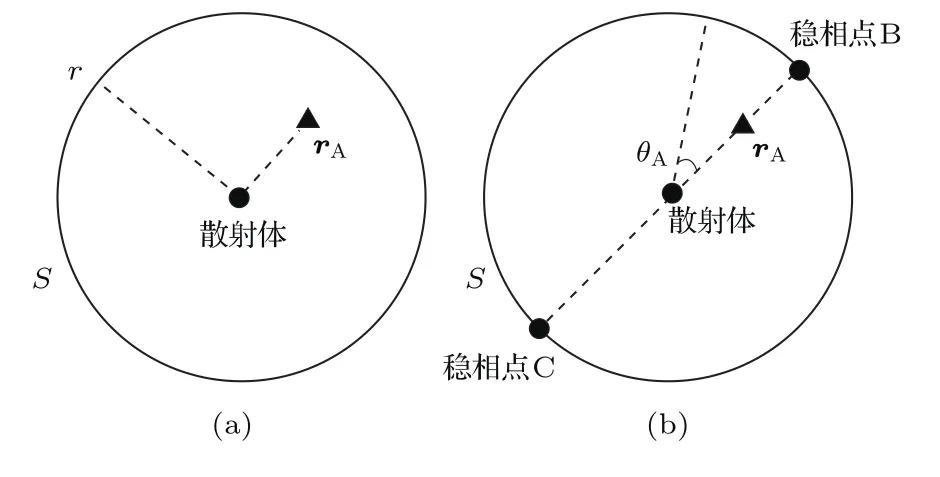
图1 (a)空间中存在散射体时示意图;(b)稳相点示意图Fig.1.(a)Schematic diagram of the scatterer and receiver;(b)schematic diagram of stationary-phase point.

其中,p∗表示p的共轭,〈〉表示统计平均(在实际中这种平均通常被几段互不重合的时间窗平均代替[16]).假设不同位置的噪声源互不相关,即

其中,Q2表示噪声源功率谱密度函数.同时假设噪声源与散射体之间的距离远大于接收器与散射体之间的距离,即r≫rA,此时|r−rA|≈r.令dS=r2dΩ,其中Ω表示声源所在球面的立体角,可以得到

(5)式等号右边包含三项,对T2项及T3项采用稳相近似[17]方法,稳相点为图1(b)中的B,C两点(可以发现T2项的两个稳相点与T3项两个的稳相点均位于散射体与接收器连线的两端),求得(5)式稳相近似的最终结果为:

将(6)式代入(5)式中,化简得到:

(7)式为空间中存在散射体时噪声自相关结果.(7)式等号右边第一项为(2)式中直达波的自相关,在时域上对应零时刻的相关峰;第二项根据广义光学定理[18]可知中括号里的部分等于零;第三项为因果以及非因果的散射项,相位中的2rA表示时域上距离零时刻2rA/c处出现相关峰.(7)式表明,虽然随机环境噪声源产生的声场通常被认为是非相干的,来自稳相点处噪声源的贡献可以看作是单一方向噪声源的贡献.因此对于同一接收器来自稳相点方向噪声源的直达波和散射波具有相干性.通过自相关运算,那些稳相点附近噪声源的贡献不断累加,其他噪声源的贡献因为振荡而相互抵消,从而在散射时刻处出现相关峰,这就为用自相关结果实现散射体探测提供了可能.但是也可以看到,自相关结果的第一项是所有噪声源积分的结果,而第三项主要是稳相点处噪声源的贡献.因此时域自相关结果零时刻的峰值远大于散射时刻的峰值,以至于散射时刻的峰值通常淹没在零时刻峰值的旁瓣中.因此在进行探测之前,有必要利用自相关背景抵消法对自相关结果进行预处理.假设有来自N个坐标为rAi(i=1,2,···,N)的接收器分别记录噪声信号,分别对其进行自相关运算得到自相关函数C(rAi,ω),令:

函数X与Z分别对应(6)式中的第T1和T3项(由于噪声源均匀分布,因此第二项为零),其中X对应时域上零时刻处的相关峰,当声源均匀分布时,X为与接收器坐标无关的常数.Z项对应因果与非因果的散射相关峰(见图2(a),可以看出不经过处理时X与Z的幅值相差很大,Z几乎分辨不出).取C(rAi,ω)的平均值作为参考结果,得到

然后用每个接收器的自相关结果减去得到

对于Z项而言,由于其散射时刻与接收器的位置有关,但当N足够大且各接收器与散射体之间的距离不同时,可以认为

因此,(10)式可以化简为

从(12)式的结果可以看出,经过自相关背景抵消后,自相关结果中零时刻的相关峰被抵消,只剩下时域上对应着因果与非因果的散射时刻(t=2rA/c)的峰值的Z部分(见图2(b)),因此这种方法可以明显提高散射峰处的信干比.
3 利用海洋噪声自相关探测实验
2016年4月22日,中国海洋大学海洋声学实验室在青岛石老人海水浴场进行了利用海浪噪声对安静散射体的探测实验,实验中接收器与散射体的相对位置如图3所示(实验时散射体距离海岸线约100 m,表明声源距离散射体超过100 m,各接收器距离散射体的平均距离约为10 m,其中距离最近的为14号7.32 m,最远为2号13 m,满足r≫rA,符合理论推导中的远场假设).实验当天的噪声记录时间为14:00—14:50,处于当日的第二次涨潮阶段,海浪噪声能量较大(在接收器位置大约为70 dB).除此之外,石老人海水浴场有着长达3 km的海岸线,沙滩宽阔平坦,海浪噪声不同日期之间的重复性高以及随潮汐进退变化缓慢而持续性好等特点,成为进行噪声探测实验的优良场地.
本次实验使用的仪器设备包括:14个无指向性传声器(型号:MNP20,生产厂家:SKC,其中1号与14号单独放置,2—7号以及8—13号为两组接收器阵,阵间距为24 cm),16通道放大器(SKC)、信号记录仪(PXI 1042Q,美国NI公司)、声级计(AWA6270+,杭州爱华).
图4展示了此次实验中1号接收器接收的12 min海浪噪声信号的时频图和功率谱.从图4(a)中可以看出,实验中接收的海浪噪声的频谱在时间上比较平稳,没有剧烈的变化.能量随频率的升高而单调下降,主要能量集中在3000 Hz以下的频段.从图4(b)中可以看出,300 Hz以下频段变化较为剧烈,而300—2500 Hz频段变化比较平缓.因此,数据处理中使用300—2500 Hz频段的噪声信号进行自相关探测.
图(5)以1号接收器为例展示了预处理前后的自相关结果(自相关的时间窗为1 s,累积时间长度为12 min,进行自相关背景抵消处理时,取N=14).从图5(a)中可以看出,自相关结果零时刻的相关峰在幅值上远远高于其他位置,使得散射时刻的相关峰淹没在零时刻的旁瓣中,这与(7)式的描述以及仿真结果相一致.图5(b)为进行自相关背景抵消后的包络(考虑到各个接收器灵敏度可能存在差异,因此自相关结果全部按照零时刻的峰值进行了归一化).对比图5(a)与图5(b)可以发现,在48 ms附近的散射信号经过预处理以后信干比有了明显的提升(这里由于海浪噪声是单边声源,不满足广义光学定理的条件,因此零时刻处的相关峰不能被完全抵消).对经过预处理的自相关结果采用基尔霍夫移位算法[19]进行探测.算法步骤如下.

图3 (a)平面坐标示意图,黑三角处为散射体(高1.2 m直径0.2 m的PVC圆筒),1—14为接收器,所有的接收器都被置于1 m高的位置并且包裹防风罩;(b)实验现场Fig.3.(a)Schematic diagram of layout of experiment,the black triangle is scatterer(a PVC cylinder with 1.2 m height and 20 cm radius),No.1–14 are receivers,all the receivers are at 1 m height and wrapped by a sponge;(b)layout of the experiment.

图4 (网刊彩色)(a)1号接收器实验中12 min的时频图;(b)1号接收器接收噪声信号12 min的功率谱Fig.4.(color online)(a)The spectrogram of the 12-minutes surf noise recorded by No.1 receiver;(b)the power spectrum of the 12-minutes surf noise recorded by No.1 receiver.

图5 1号接收器接收噪声信号预处理前后自相关结果,经测量,1号接收器距离散射体中心位置8.26 m,计算得散射路径应出现在±48 ms处,在图中用红色箭头标出 (a)1号接收器12 min自相关结果;(b)1号接收器12 min自相关函数减去参考自相关函数后的包络Fig.5.Autocorrelation result of the noise recorded by No.1 receiver before and after preprocessing,in the experiment,the No.1 receiver is 8.26 m away from the center of the scatterer,as the red arrow shows in the fi gure,we calculate that the scatter wave may arrive at±48 ms:(a)The autocorrelation result of the noise recorded by No.1 receiver before preprocessing;(b)the envelope of autocorrelation result of the noise recorded by No.1 receiver after preprocessing.
第一步,将包含目标在内的扫描区域分成等间隔的搜索点;
第二步,计算每个搜索点rs与每个接收器rAi之间距离的2倍,然后除以声速作为时间偏移量(∆ts,i=2|rs−rAi|/c0);
第三步,计算所有搜索点处的处的基尔霍夫移位(KM)泛函,

第四步,取零时刻处附近一个小邻域中(−t′,t′)的能量积分作为每个搜索点的代价函数,
图6分别展示了无同步误差时互相关以及自相关的KM移位以后的结果(搜索区域为图3(a)所示的坐标系中,x方向0—10 m,y方向7—13 m的矩形范围,扫描精度为0.1 m.图中标有“*”号的位置代表散射体圆心的实际位置),可以发现经过预处理后,在不考虑各通道之间的同步性的情况下,自相关可以实现与互相关的几乎相同探测结果.
图7展示了各个接收器之间不同步时,两种处理方式KM移位结果的对比.不难看出,随着各个接收器之间的同步误差的增加,互相关的结果逐渐变差,最后几乎无法正确定位散射体.而自相关的结果却几乎不受各接收器同步问题的影响,这充分体现了自相关方法的优越性.

图6 (网刊彩色)无同步误差时相同接收器相同时间段内自相关与互相关KM移位成像方法的结果,图中*号表示目标的实际位置 (a)互相关结果;(b)自相关结果Fig.6.(color online)The result of Kirchho ffmigrant using cross-correlation and autocorrelation without synchronization error,the ‘*’in the fi gure shows the actual postion of the target:(a)Cross-correlation;(b)autocorrelation.

图7 (网刊彩色)接收器存在同步误差时对两种探测结果的影响 (a),(d)分别为存在1 ms同步误差时互相关与自相关的探测结果;(b),(e)分别表示存在2 ms同步误差时互相关与自相关的探测结果;(c),(f)分别表示存在5 ms同步误差时互相关与自相关的探测结果Fig.7.(color online)The e ff ect on two detecting methods when there is synchronization error:(a)and(d)Shows the result of Kirchho ffmigrant using cross-correlation and autocorrelation respectively when the synchronization error is 1 ms;(b)and(e)shows the result when the synchronization error is 2 ms;(c)and(f)shows the result when the synchronization error is 5 ms.
4 结 论
本文通过推导散射体存在时环境噪声的自相关结果,证明了利用环境噪声的自相关对散射体进行探测的可行性.当噪声场均匀分布时且时间上平稳时,噪声场的自相关结果中就会包含散射体位置的信息.同时,根据自相关结果的特点利用自相关背景抵消方法进行预处理,从而显著提高了目标位置处的信干比.在实验中利用12 min的海浪噪声自相关结果实现了对距离10 m远处的PVC圆筒的探测.同时通过与存在同步误差时互相关方法的探测结果对比,证明了自相关探测方法的稳定性.在今后的工作中将会详细讨论散射信号的信噪比与探测结果的关系以及针对自相关的频域预处理方法,从而进一步提高探测结果的分辨率,为最终实现水下安静目标的被动探测奠定基础.
[1]Buckingham M J,Broderick V,Glegg S A L 1992Nature356 327
[2]Epifanio C L,Potter J R,Deane G B,Readhead M L,Buckingham M J 1999J.Acoust.Soc.Am.106 3211
[3]Weaver R L,Lobkis O I 2001J.Acoust.Soc.Am.110 3011
[4]Larose E,Derode A,Campillo M,Fink M 2004J.Appl.Phys.95 8393
[5]Larose E,Montaldo G,Derode A,Campillo M 2006Appl.Phys.Lett.88 104103
[6]Lani S,Satir S,Gurun G,Sabra K G,Degertekin F L 2011Appl.Phys.Lett.99 224103
[7]Sabra K G,Gerstoft P,Roux P,Kuperman W A,Fehler M C 2005Geophys.Res.Lett.32 000
[8]Curtis A,Gerstoft P,Sato H,Snieder R,Wapenaar K 2006The Leading Edge25 1082
[9]Roux P,Kuperman W A,the NPAL group 2004J.Acoust.Soc.Am.116 1995
[10]Brooks L A,Gerstoft P 2009J.Acoust.Soc.Am.125 723
[11]Snieder R,van Wijk K,Haney M 2008Phys.Rev.E78 036606
[12]Garnier J,Papanicolaou G 2009J.Imaging Sci.2 396
[13]Davy M,Fink M,de Rosny J 2013Phys.Rev.Lett.110 20
[14]Li G F,Li J,Gao D Z,Wang N 2016Acta Acustica41 49(in Chinese)[李国富,黎洁,高大治,王宁 2016声学学报41 49]
[15]Li J,Gerstoft P,Gao D Z,Li G F,Wang N 2017J.Acoust.Soc.Am.141 64
[16]Larose E,Margerin L,Derode A,van Tiggelen B,van Campillo M,Shapiro N M,Paul A,Stehly L,Tanter M 2006Geophysics71 SI11
[17]Bender C M,Orszag S A 1999Advanced Mathematical Methods for Scientists and Engineers(New York:Springer-Verlag)pp276–280
[18]Glauber R,Schomaker V 1953Phys.Rev.89 667
[19]Sabra K G,Winkel E S,Bourgoyne D A 2007J.Acoust.Soc.Am.121 4
Passive detection of scatterer using autocorrelation of surf noise∗
Chi Jing Li Xiao-LeiGao Da-Zhi†Wang Hao-Zhong Wang Ning
(Department of Marine Technology,Ocean University of China,Qingdao 266100,China)
When a scatterer is located in a di ff use noise fi eld,time domain Green’s function between two di ff erent receivers can be extracted from cross-correlation of ambient noise which is recorded by the two receivers so that target detection can be implemented.However,the method based on cross-correlation strongly depends on timing synchronization of each receiver,otherwise there will be a time drift in the cross-correlation result,which can bring error in the positioning detection.Besides,two receivers that are far from each other must communicate with each other to implement crosscorrelation in real-time data processing,but big data transmission is difficult in the ocean.Compared with crosscorrelation,autocorrelation means that each receiver works independently and only the fi nal autocorrelation result is to be transmitted.Actually,the scattered wave of target is always so weak that it is submerged in the autocorrelation result of the ambient noise.In this paper,we propose a method of processing the autocorrelation of the ambient noise.When the averaging noise autocorrelation of all receivers is subtracted from the autocorrelation result of the noise recorded by each receiver,the signalnoise ratio of the scattered wave will be signi fi cantly enhanced.With the help of Kirchhoff migration algorithm,detection of a scatterer can be implemented.We have conducted a scatterer passive detection experiment in Shilaoren beach,Qingdao,and accurately detected the position of a polyviny chloride pipe(about 8 m away from the nearest receiver)using only 12 min surf noise data.The experimental result shows that the processing of autocorrelation could replace cross-correlation in passive target detection when the ambient noise is time steady and the statistical characteristics of the background noise at di ff erent receivers are the same.Unlike Green’s function extracted from cross-correlation of ambient noise,each receiver can work independently without considering the problems of massive data transmission and timing synchronization,which may be suitable for target detection using multi-receivers and mobile platform.
autocorrelation of ambient noise,passive detection of scatters,silent target
11 April 2017;revised manuscript
4 July 2017)
(2017年4月11日收到;2017年7月4日收到修改稿)
10.7498/aps.66.194304
∗国家自然科学基金(批准号:11674294,11374270,11374271)和青岛海洋科学与技术国家实验室基金(批准号:QNLM2016ORP0106)资助的课题.
†通信作者.E-mail:dzgao@ouc.edu.cn
©2017中国物理学会Chinese Physical Society
PACS:43.50.+y,43.60.+d
10.7498/aps.66.194304
*Project supported by the National Natural Science Foundation of China(Grant Nos.11674294,11374270,11374271)and the Foundation of Qingdao National Laboratory for Marine Science and Technology,China(Grant No.QNLM2016ORP0106).
†Corresponding author.E-mail:dzgao@ouc.edu.cn
