屏蔽电机的建模与仿真∗
2017-10-23申喜
申 喜
(中国舰船研究设计中心 武汉 430000)
屏蔽电机的建模与仿真∗
申 喜
(中国舰船研究设计中心 武汉 430000)
为了对屏蔽电机开展仿真研究,在同步旋转坐标系下建立了屏蔽电机的数学模型,通过参考相关资料给出了屏蔽电机参数的估算方法。利用PSCAD开展了相应的仿真计算,通过仿真结果与给定值的比较,证明估算的电机参数能较好地反映屏蔽电机的启动特性,可以用于实际仿真中去。
屏蔽电机;旋转坐标系;PSCAD
ClassNum ber TM314
1 引言
屏蔽电机是一种特殊的异步电机,通过联轴器将泵的叶轮轴与电动机轴相连,使叶轮与电动机一起旋转而工作,达到完全无泄漏。屏蔽电动机定、转子分别用非磁性耐腐蚀薄壁套(即屏蔽套)隔离起来,输送介质可以进入电机内部,却无法进入定、转子及铁心[1~3]。因此,屏蔽电机可以输送易燃、有毒、有腐蚀性及放射性等各种介质,应用于石油、化工、制药、食品和军工等领域[4~6]。
不同于一般的异步电动机,屏蔽电机在定子与转子之间加入了各自的屏蔽套,因此气隙较大,特别是低速小容量工况下,励磁电流占较大比例,因而功率因数较低。同时将屏蔽套置于电机的交变磁场中,在屏蔽套中就必然产生涡流,引起涡流损耗。另一方面,屏蔽套内的时变磁场同主磁场合成,改变了气隙磁场分布,使电机磁场和绕组电流情况发生了变化[7~9]。
华中科技大学周理兵等对屏蔽电机模型及其调速系统进行研究,给出了屏蔽套涡流损耗的计算方法[10]。哈尔滨理工大学梁艳萍等对双屏蔽复合转子电机的不同工况下的性能参数进行了分析,利用有限元法计算了屏蔽电机的动态参数曲线,并得到了屏蔽套的等效阻抗参数和电路模型[11]。
本文通过借助上述几位的研究成果,在此基础上,给出了在给定参数不全的情况下,屏蔽电机参数的估算方法,并通过PSCAD仿真软件进行了建模仿真分析,仿真结果表明在只关注电机起动对系统的影响时,所搭建的屏蔽电机模型能较好地反映屏蔽电机的启动特性,可以应用于实际的仿真系统中去。
2 屏蔽电机的建模
屏蔽电机定子侧有定子绕组和屏蔽套两个导电层,转子侧有鼠笼绕组和屏蔽套两个导电层。每个导电层相当于一套绕组。稳态运行时,转子转速与气隙基波旋转速度之间相对速度小,旋转磁场切割转子的频率为转差频率,由基波磁场切割引起的涡流损耗可忽略,因此转子屏蔽套支路视为开路。屏蔽电机等效电路如图1所示[12]。
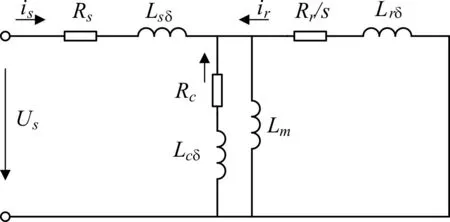
图1 屏蔽电机的等效电路模型
屏蔽电机在d-q旋转坐标系下电压方程为

其中:ωs=ω1-ω为dq坐标系相对于转子的速度。
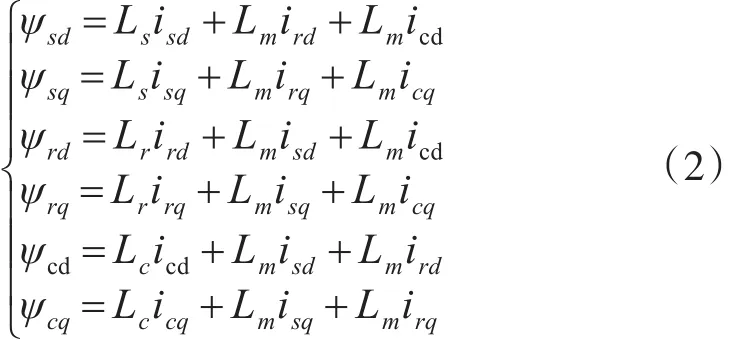
屏蔽电机磁链方程为
转矩方程为

运动方程为

式中,J为机组的转动惯量,Te为电磁转矩,TL为包括摩擦阻转矩和弹性扭矩的负载转矩。us,is,ψs为定子电压、电流和磁链;ur,ir,ψr为转子电压、电流和磁链;uc,ic,ψc为屏蔽回路的电压、电流和磁链;Ls,Lr,Lc为定子、转子和屏蔽回路的等效自感;Lm为等效互感;np为极对数;ω为电机转子的旋转角速度。上述各量都已折算到定子侧。
基于数学方程(1~4),可以建立屏蔽电机的仿真模型。如图2所示。
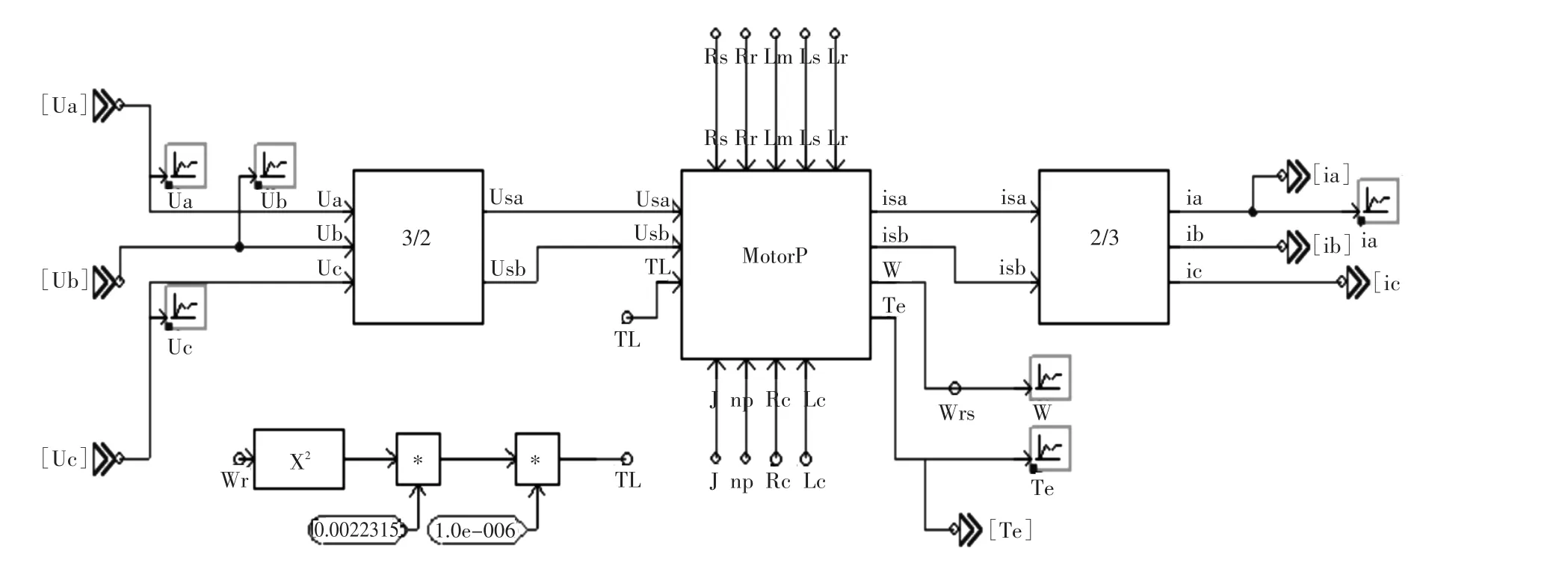
图2 屏蔽电机的仿真模型
3 屏蔽电机的参数估算
3.1 屏蔽电机参数的给定
本仿真中给出的屏蔽电机为立式单绕组庶极式屏蔽电机,有4/8极庶极式绕组,具有高速和低速运行两种方式,同步转速分别为1500r/min、750r/min,半流量惰转时间为1.5s。该电机为双速鼠笼感应电动机,其他关键参数如表1所示。
为了仿真结果的准确性,一般需要通过相关试验得到电机内部的相关参数。通过空载试验,可以测定电机励磁电阻、励磁电抗、铁耗和机械损耗,此时转子电流小,忽略转子铜耗,转子支路近似开路。通过短路试验,可以测定电机短路阻抗、转子电阻、定转子漏抗,由于Xm>>Rm,忽略Rm,近似认为X1s=X2s。

表1 屏蔽电机关键参数
本文通过给定输入参数、起动和最大转矩等数据,计算出电机定转子电阻和漏电抗,并参考文献数据,对屏蔽电机Xm估算,然后在PSCAD中对电机模型进行反复仿真,得到较为合适的电机模型和参数。
3.2 屏蔽电机参数的参考
华中科技大学周理兵等对屏蔽电机模型及其调速系统进行研究,实验验证中的电机型号为Y180M-2,功率为22kW,额定电压380V,额定电流42.2A,额定转速2940r/min,额定频率50Hz,极对数1,功率因数 0.89[10]。实心鼠笼型复合转子,等效电机带屏蔽套,试验测得参数如表2所示。
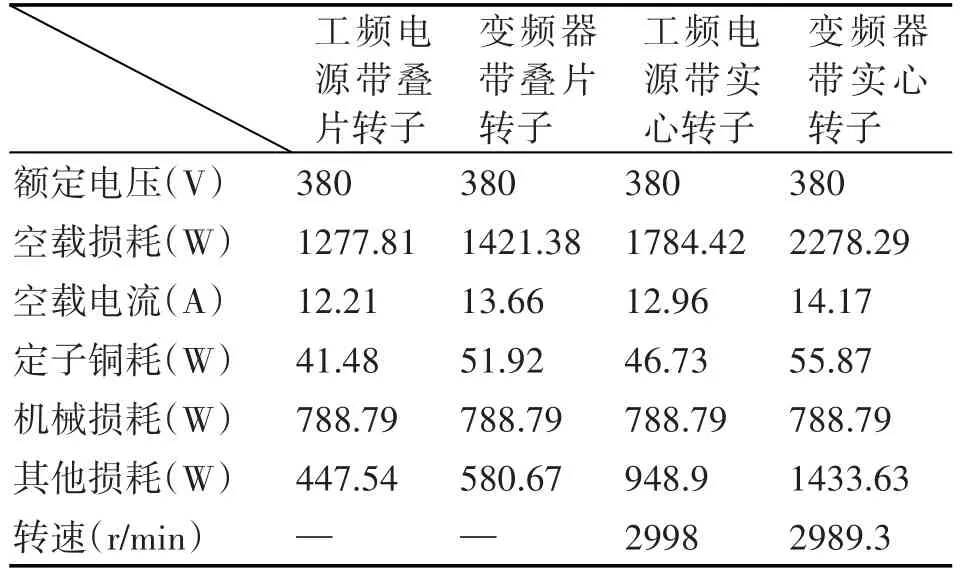
表2 屏蔽电机参数
哈尔滨理工大学梁艳萍等对双屏蔽复合转子电机的不同工况下的性能参数进行了分析,利用有限元法计算了屏蔽电机的动态参数曲线,并得到了屏蔽套的等效阻抗参数和电路模型[11]。仿真参数如表3所示。
3.3 屏蔽电机参数的计算
1)电机相关参数
屏蔽电机除了普通电机的各种损耗(定子铜耗PCu1、转子铜耗 PCu2、铁耗PFe、机械损耗PΩ、附加损耗Pad)外,还多了定转子屏蔽套损耗(定子PCon1、转子PCon2)和水磨损耗Pwa两部分。水磨损耗是指定、转子屏蔽套间循环水引起的损耗[13]。

表3 屏蔽电机参数
总机械功率为

电磁功率为

输入功率为

转差率为

其中,n1为同步转速,nN为额定转速。那么,nN=(1-s)n1。
机械角速度:

额定电流为
其中,P1=PN,为额定功率;η为效率;UN为额定线电压;cosφ为功率因数。
2)特性参数
(1)起动特性:
根据起动转矩倍数kst=1.01,有

得到起动电磁功率为Pems=kstΩ1/Ω·PN。


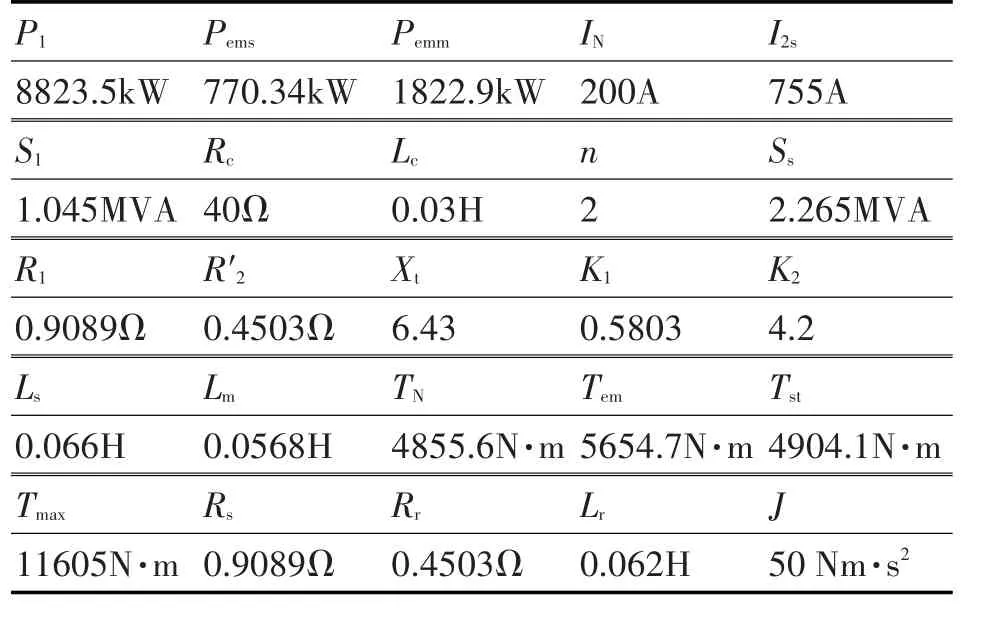
表4 屏蔽电机参数
当屏蔽电机为8极时,当 nN=742、η=0.85、K2=4.2,模拟参数如表5所示。
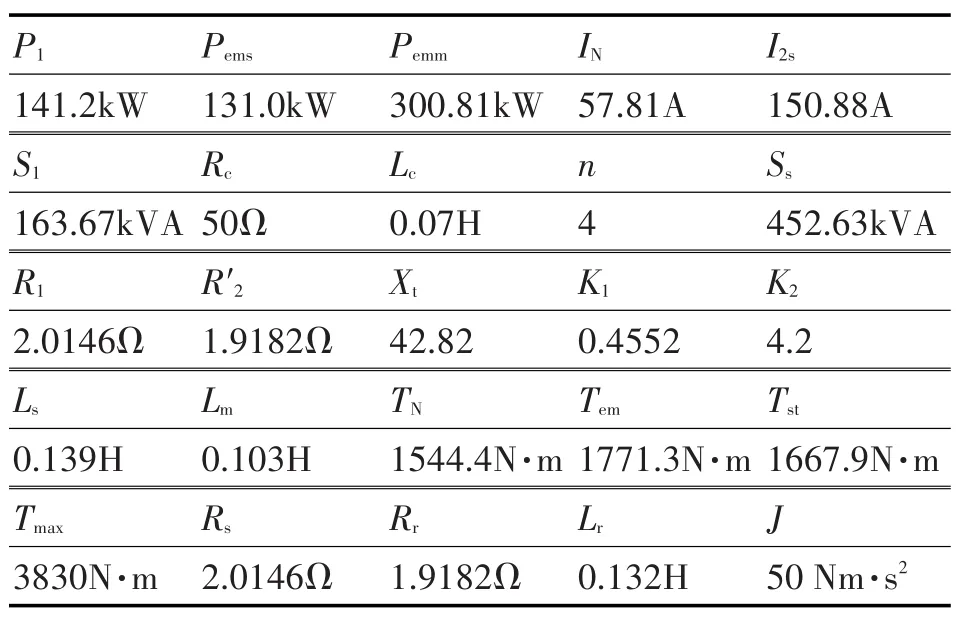
表5 屏蔽电机参数
4 屏蔽电机仿真分析
4.1 高速运行
根据表4参数,在PSCAD/EMTDC x4.5中建立高速屏蔽电机模型,仿真模型如图3所示。
在高速运行时的仿真波形如图4~图6所示。
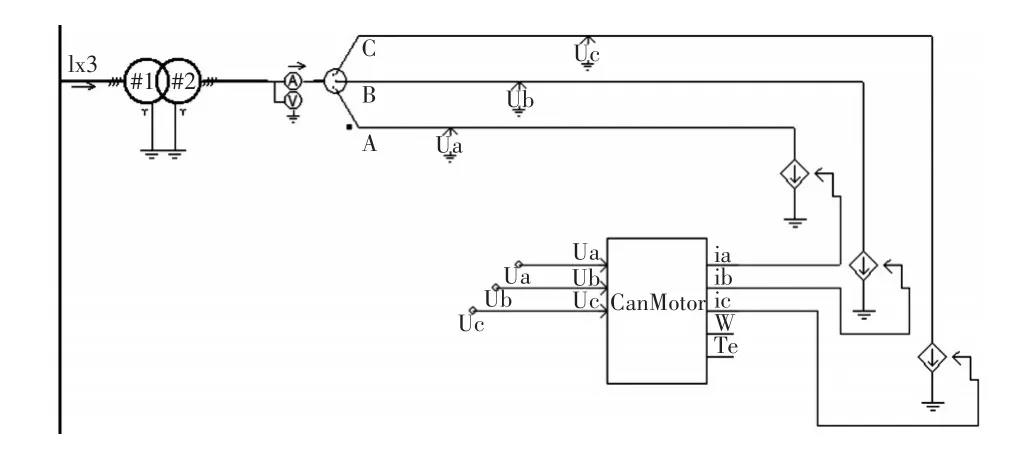
图3 屏蔽电机供电系统模型

图4 高速屏蔽电机定子电流波形

图5 高速屏蔽电机转速波形
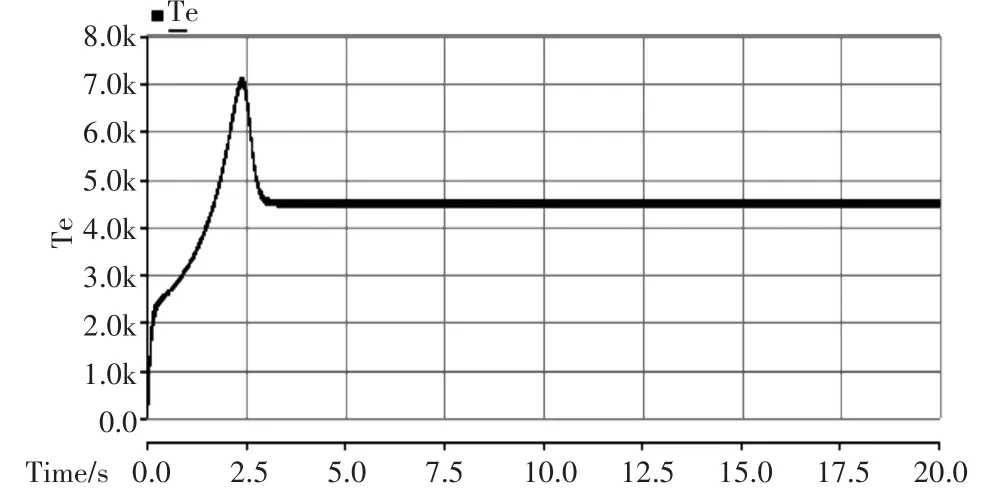
图6 高速屏蔽电机电磁转矩波形
从图中可以看出,电机电流最大为770A,稳定有效值为203.7A,稳定转速为1418r/min,最大电磁功率7120N·m,稳定后平均电磁转矩4480N·m。与模拟值相比,电流偏差为2%,稳定值偏差1.85%,转速偏差3.9%。起动电流偏差较小,而电磁转矩参数相差较大。原因是,对电机的等效电感、转动惯量等参数的估计存在偏差,而仿真中,主要关注电机起动对系统的影响。因此,该电机模型可以用来仿真屏蔽电机的运行工况。
4.2 低速运行
根据表5参数,在图3中搭建低速运行屏蔽电机供电系统模型,仿真波形如图7~图9所示。

图7 低速屏蔽电机定子电流波形
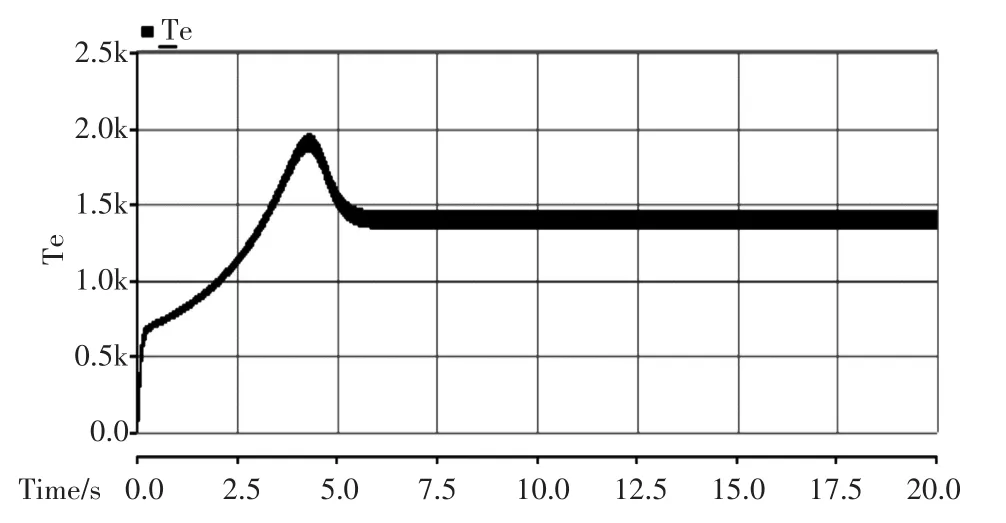
图9 低速屏蔽电机电磁转矩波形
从图中可以看出,电机电流最大为155A,稳定有效值为60.1A,稳定转速为703r/min,最大电磁功率1950N·m,稳定后平均电磁转矩1380N·m。与模拟值相比,电流偏差为3.3%,稳定值偏差3.8%,转速偏差5.3%。起动电流偏差较小,而电磁转矩参数相差较大。原因是,对电机的等效电感、转动惯量等参数的估计存在偏差,而仿真中,主要关注电机起动对系统的影响。因此,该电机模型可以用来仿真屏蔽电机的运行工况。
5 结语
本文系统分析了屏蔽电机的数学模型,利用电压方程、磁链方程、电磁转矩方程及机械特性方程,建立了屏蔽电机的仿真模型。给出了在给定参数不全的情况下,屏蔽电机参数的估算方法,并通过PSCAD仿真软件进行了建模仿真分析,仿真结果表明:所搭建的屏蔽电机在高速和低速运行工况下,能较好地反映屏蔽电机的启动特性,可以应用于实际的仿真系统中去。
[1]杨胜利,孙昌志.多极理论及其在屏蔽电机中的应用[J],沈阳工业大学学报,1999(01):26-29.
[2]高莲莲,梁艳萍.双屏蔽电机定子端部漏抗计算及其影响分析[J],电机与控制学报,2015(19):53-57.
[3]宋艳文,林艳江.屏蔽电动机屏蔽套的设计特点及常见问题的预防措施[J].防暴电机,2002(1):16-18.
[4]刘立刚,常焕亮,于玉平.屏蔽电泵及其应用[J].防暴电机,1996(2):14-17.
[5]李革,李德成,杨霞.屏蔽式感应电动机的设计特点[J].沈阳工业大学学报,2001,23(4):295-297.
[6]索文旭.屏蔽电机技术特点[J].大电机技术,2006(9):57-59.
[7]张晓晨,李伟力,曹君慈.屏蔽电机屏蔽损耗与电机性能的计算与分析[J],哈尔滨工业大学学报,2007(09):1422-1426.
[8]周明荣.永磁屏蔽电泵电磁场有限元分析及其屏蔽套涡流损耗计算等[D].杭州:浙江工程大学硕士学位论文,2004:1-2.
[9]孙树林,李觉民.屏蔽式感应电动机屏蔽套损耗的计算及减少途径[J].大电机技术,1987(6):30-33.
[10]蒋炜,周理兵,杨通.变频调速屏蔽电机仿真及其损耗计算[J].电机与控制应用,2006(08):27-31.
[11]张建涛,梁艳萍,王鸿鹄等.双屏蔽复合转子电动机性能分析[J].大电机技术,2006(07):22-26.
[12]吕昊,马伟明,聂子玲,等.转子磁场定向矢量控制中异步电机铁损模型分析[J].中小型电机,2004,31(2):10-13.
[13]陈世坤.电机设计[M].第二版.北京:科学出版社,2000:272-274.
Modeling and Simulation of Canned Motor
SHEN Xi
(China Ship Research and Design Center,Wuhan 430000)
In this paper,canned motormathematicalmodel in rotational coordinate system is deduced for simulation and researching.The parameters of canned motor are given by referring to the relevant data.Then themodel of canned motor is deduced with PSCAD software,which provides that the estimated motor parameters can reflect the starting characteristics of canned motor reasonable by comparing the simulation resultswith the given results.Themodel of cannedmotor in PSCAD can be used for actual simulation.
cannedmotor,rotational coordinate system,PSCAD
TM314
10.3969/j.issn.1672-9730.2017.09.014
2017年3月11日,
2017年4月28日
申喜,男,工程师,研究方向:舰船电力系统仿真分析。
