多功能家庭宠物喂食机器人的设计
2017-10-20陈猛
陈猛
摘要:当今社会上,越来越多的人喜欢养宠物,但由于出差或旅游等原因外出时不能及时照顾宠物。本系统的设计在一定程度上能够解决主人不在身边 时宠物的饮食问题。本系统的设计实用性强,用户可以远程控制机器人给宠物喂食,就如同用户本人给宠物喂食一样。还能控制选择不同餐格的食物, 按宠物身体状况选择相应的食物进行喂食,可有效保护宠物健康成长。用户通过远程激光逗宠,可以防止宠物患有肥胖症并起到锻炼的作用。同时应该 知道,只有经过良好的训练,宠物才能有效地适应喂食机器人。
关键词:远程控制;宠物喂食;激光逗宠
中图分类号:TP399 文献标识码:A 文章编号:1672-9129(2017)09-041-02
Abstract: In today's society, more and more people like to keep pets, but they can not take care of pets in time due to travel or traveling. The system's design to a certain extent, be able to solve the owner's diet is not around when the problem. The practical design of the system is strong, the user can remotely control the robot to feed the pet, just as the user to feed their pets. But also control the choice of food in different formats, according to the physical condition of pets choose theappropriatefoodforfeeding,whichcaneffectivelyprotectthehealthygrowthofpets.Theuserthroughtheremotelaserpet,petcanpreventobesityandplaya role.Atthesametime,itshouldbenotedthatpetscaneffectivelyadapttofeedingrobotsonlyaftergoodtraining.
Keywords: remote control; pet feeding; laser funny pet
引言
随着我国社会经济水平的快速发展,城市化的进程不断加速。我国国 民生活水平不断得到提高,我国的宠物行业[1]也得到了飞速的发展。
宠物的喂养和看护往往是宠物主人最关心的问题,目前宠物主要还是依靠人工进行喂食[2]。而在当今社会中,人们的工作与学习是十分的繁 忙,当人们外出时间比较长时对宠物的食物的供给就出出现了比较大的问题。特别是当人们出差在外或者是旅游度假时,经常不能及时的对家中 的宠物给予很好地照顾,宠物的饮食常常成为困扰人们主要问题[3-4]。
本系统设计的机器人,在外观上很灵巧,体积相对较小,不会让宠物 感到畏惧和不适应。同时具有如下功能:实时视频、语音呼叫喂食、多餐格 食物选择、远程激光逗宠等,做到了很好的人机交互,能够满足爱宠人士 的需求。同时,本系统设计的机器人的摄像头由于搭建在一个二自由度的 云台上,通过远程控制云台转动几乎可以查看家里所有角落的信息,起到了很好的安防功能。
1 系统数字化设计
本设计中模型均采用 Solid Edge[5-6]软件设计,各个组件设计分别如下:
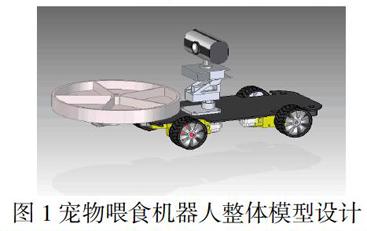
图 1 宠物喂食机器人整体模型设计
宠物喂食机器人的整体轮廓如图 1,将餐盘固定于步进电机之上,并将步进电机通过铝制长形薄片与车体连接,且摄像头安装于餐盘后方,进而能够及时观察餐盒食物余量和選择相应餐格食物。
2 系统软硬件设计
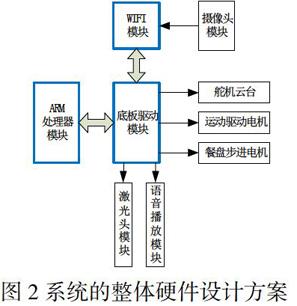
3.1 系统硬件设计方案。本系统由 ARM 处理器模块、底板驱动模块和
WIFI 模块组成,传感器单元由摄像头模块组成,被控对象由转向舵机、直流电机、步进电机、激光头模块和语音播放模块等组成。网络传输通过
WIFI 模块进行传输。系统的整体硬件设计方案图 2 所示:
图 2 系统的整体硬件设计方案
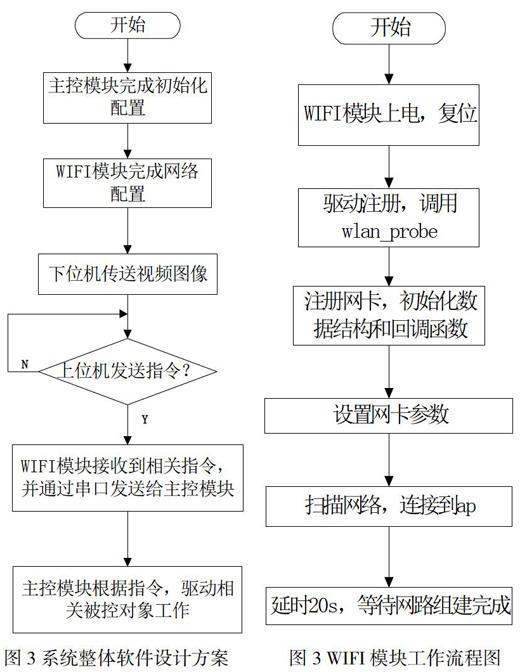
3.2 系统软件设计方案。用户打开手机端 APP 即可实时视频,同时用户可以根据自己的需要,通过手机端发送相关指令参数,WIFI模块收到指令后,通过串口将该指令发送给主控模块。主控模块接收到指令后,作出分析判断并驱动相关部件进行工作。
3.2.1 WIF 模块工作流程图
WIFI模块上电,复位
图3系统整体软件设计方案 图 3WIFI模块工作流程图
3.2.2 上位机和下位机通信协议。上位机发送指令控制下位机的协议格 式包括 5 个部分:包头、类型位、命令位、数据位和包尾,其基本命令格式为
FF+XX+XX+XX+FF。包头和包尾均为FF,前进、后退、左转、右转、红光开、白光开、红白关、语音 1、语音 2、左微调、转一格、右微调等控制指令的类型位和数据为均为00,命令位为01~04、09~0F、10,云台舵机1和云台舵机2的类型位均为01,命令位分别为07和08,数据位为舵机角度值。
4 结束语
本设计采用的方案是 WIFI 技术与广域网的融合,其通过配置家庭路由器,将机器人的WIFI 模块的控制地址和视频地址映射在路由器上,用户无论在家中还是在外面,只要手机有网络,然后打开本机器人对应的手机端 APP 就能实现实时视频和远程控制。相比于普通的蓝牙技术,本设计的技术优势显而易见,不仅传输速率高, 而且可以远程实时控制。更是进一步采用了舵机云台控制摄像头的角度, 几乎无死角的监控家里各个角落,使得用户完全可以免去了安装监控摄像头。
参考文献:
[1] 陆江, 朱道仙, 卢劲晔,等. 我国宠物行业发展现状与分析[J]. 兽医导刊, 2017(14):26-26.
[2] 马晨晖. 宠物喂养机智能远程控制系统的设计与研发[D]. 山东理工大学, 2015.
[3] 李欣. 广州市宠物猫饮食状况与疾病关系的调查及中药处方粮的辅助治疗作用[D]. 华南农业大学, 2016.
[4] 孟刚. 我国宠物行业的发展现状与发展前景 [J]. 青海畜牧兽医杂志, 2010, 40(5):38-39.
[5] BrookR.SolidEdgeDesignSensors(OntheEdgeSolidEdgeTutorial) [J],2008.
[6] TickooS.SolidEdgeST3forDesigners[J],2011.
