基于零体积速度模态配置的结构声主动控制
2017-10-17白金黎胜夏茂龙
白金,黎胜,夏茂龙
(1.大连理工大学 工业装备结构分析国家重点实验室,辽宁 大连 116024; 2.大连理工大学 船舶工程学院,辽宁 大连 116024)
基于零体积速度模态配置的结构声主动控制
白金1,2,黎胜1,2,夏茂龙1,2
(1.大连理工大学 工业装备结构分析国家重点实验室,辽宁 大连 116024; 2.大连理工大学 船舶工程学院,辽宁 大连 116024)
耦合模态空间控制方法可以对被控系统的固有频率、阻尼比和模态振型进行配置。针对结构低频振动噪声的主动控制问题,本文采用耦合模态空间控制方法将结构的振动模态控制为零体积速度模态。以矩形简支板为例进行了结构声辐射主动控制仿真,将板的第1阶和第4阶振动模态控制为零体积速度模态,结果表明,简支板的低频声辐射得到了有效控制。本文提出的结构声主动控制方法可以有效控制结构低频振动噪声,同时具有物理意义清楚、控制过程简单、控制率的设计与激励力大小和位置无关等特点。
结构声主动控制; 耦合模态空间控制; 零体积速度模态; 反馈控制; 结构声辐射; 声功率; 振动模态; 声辐射模态
Abstract:The dependent modal space control (DMSC) method can be used to control the mode shapes, natural frequencies, and damping ratios in controlled systems. To actively control low- frequency structurally radiated noise, in this study, we used the DMSC method to control the vibration modes of a structure as zero- volume velocity modes. We numerically evaluated the ASAC of a simply supported rectangular plate, using the DMSC method to control the first- and fourth- order vibration modes of the plate at the zero- volume velocity mode. Our simulation results show that we can effectively reduce low- frequency sound radiation from a plate. As such, our proposed structural acoustic control method can effectively reduce low- frequency structurally radiated noise. This method is direct and simple to perform. Also, the control law design is unrelated to the amplitudes and locations of the excitation forces.
Keywords:active structural acoustic control; dependent modal space control; zero- volume velocity mode; feedback control; structural acoustic radiation; sound power; vibration mode; radiation mode
结构声主动控制(active structural acoustic control,ASAC)是结构振动辐射声场控制的研究重点之一[1-3]。结构声主动控制从结构振动与声辐射的关系出发,采用次级振源来进行结构声的主动控制,其实质是将振动主动控制应用到结构声辐射控制中,所以结构声主动控制的研究进展是与振动主动控制的研究进展息息相关的[4]。Fuller等采用前馈控制方法对受控结构进行特征结构配置,使受控模态的辐射效率最低,且受控系统的固有频率避开外部激励频率,实现了对受控结构在窄带和宽带上的声辐射控制[5]。Elliott等则采用前馈控制方法将结构的振动速度控制成体积速度近似为零的情况,实现了对受控结构的低频声辐射控制[6-7]。Wu等采用自适应特征向量优化算法,对闭环系统的左、右特征向量进行优化,实现了结构声辐射的主动控制[8]。以上这些方法的一个共同特点都是将受控结构的模态控制为弱辐射模态以降低结构的声辐射。在振动主动控制研究中,独立模态空间控制(independent modal space control, IMSC)方法是振动主动控制领域中常见的一种控制方法,它可以对闭环系统部分模态的固有频率和阻尼比进行配置,而其他阶模态不受影响[9]。而由Serra提出的耦合模态空间控制(dependent modal space control, DMSC)方法不仅可以对闭环系统的部分模态的固有频率和阻尼比进行配置,还可以配置相应模态的振型[10]。但目前还没有看到将耦合模态空间控制方法用于结构声辐射主动控制的研究。因此,基于耦合模态空间控制方法可以对结构模态振型进行配置的特点,本文将其引入到结构声辐射主动控制中,将受控结构的模态振型控制为弱辐射模态振型以降低结构的声辐射。结构表面各节点的法向振速沿结构表面的积分称为体积速度[7,11],相应地,结构模态振型的表面法向速度沿结构表面的积分就称为模态体积速度。结构进行低频振动时,其体积速度与辐射声功率近似成比例[6],模态体积速度大的模态其声辐射也较强,而零体积速度模态其声辐射就非常弱[11]。
1 结构振动辐射声功率计算
由模态分析理论,有限元节点速度向量可表示为
(1)

vn=Tv
(2)
式中:T为转换矩阵,v为结构表面节点速度向量。
结构振动辐射声功率W可用下式表示[12]:
(3)
式中:R为对称正定的声辐射阻力矩阵,可以分解成如下形式[6, 12]
R=QΛQT
(4)
式中:Λ为R的特征值构成的实对角阵,Q为R的特征向量构成的实数正交阵,满足QT=QH=Q-1[13]。将R的特征值从大到小依次排列,得到各阶特征值λi(i=1,2,…,I),及相应的特征向量qi(i=1,2,…,I),I为结构表面节点个数。将式(4)代入式(3),则有[6]
(5)
其中

(6)
(7)
式中:qi表示一种可能的速度分布,代表了一种固有的辐射形式,称为声辐射模态。由式(5)可知,各阶声辐射模态对声辐射的贡献是相互独立的,第i阶声辐射模态的辐射声功率等于第i阶声辐射模态幅值|yi|的平方乘以相应的特征值λi。根据文献[6],低频(kl≤1,k为波数,l为结构特征长度)时,第1阶特征值λ1远大于其他阶特征值,第1阶声辐射模态对总的辐射声功率起主导作用。因此,如果降低了第1阶声辐射模态的辐射声功率,也就可以降低总的辐射声功率。而当结构稳态振动时,特征值λi只与结构的几何形状有关[12],控制力对其没有影响,因而可以通过降低第1阶声辐射模态幅值|y1|来降低第1阶声辐射模态的声辐射,进而降低低频时结构总的声辐射。
由式(1)、(2)、(7)可得
(8)
(9)
式中:yi,k为第i阶声辐射模态与第k阶振动模态的结构表面法向分量的内积。参考文献[6],结构的声辐射模态形状在低频(kl≤1)时的变化十分缓慢,其中,第1阶声辐射模态形状接近于向量中各元素均相等的情况。因此低频时y1,k同第k阶模态体积速度γk近似成比例,即
φk∝γk=∬Tφkds
(10)
因此,如果将结构的前几阶模态体积速度控制为零,就会降低低频时第1阶声辐射模态幅值|y1|,最终降低结构在低频时总的声辐射。
2 零体积速度模态构造方法

Φcm=ΦmW
(11)
式中:W∈Rm×m,非奇异。若Φm中的m个模态振型均为非零体积速度模态振型,则希望经过线性转换矩阵W可以构造出体积速度都为零的闭环系统的m个目标模态振型Φcm。但由矩阵理论可知,只有当Φm中的m个模态振型的体积速度都为零时,才能使Φcm中的m个模态振型的体积速度都为零。因此,可以退而求其次,先将Φm经线性变换得到m-1个零体积速度模态振型Φc(m-1),即
Φc(m-1)=ΦmW1
(12)
式中:W1∈Rm×(m-1)。再选取Φm中的体积速度较小的模态振型作为Φcm的第m阶模态振型。即
(13)

(14)
这样,由本节构造的闭环系统的m个目标模态振型Φcm只能保证W为非奇异的前提下,Φcm中的前m-1阶模态满足体积速度为零的条件,这在实际应用中是需要特别注意的。
3 耦合模态空间控制方法
含有外部激励力和控制力的结构动力学方程可以写为
(15)


(16)
式中:G为反馈控制增益矩阵。当控制目标Φcm由式(11)确定后,就可以由耦合模态空间控制方法[10]根据控制力位置矩阵得到反馈控制增益矩阵G,进而由式(16)得到控制力向量Fc,对振动系统实施主动控制。
基于零体积速度模态配置的结构声主动控制的步骤如下:
1)对振动结构进行振动模态分析,在前几阶振动模态中选出体积速度较大的m阶振动模态Φm,运用2节中的方法得到控制目标Φcm。
2)确定控制力施加位置,由耦合模态空间控制方法得到反馈控制增益矩阵G。
3)由式得到反馈控制力,实施结构声主动控制。
4 数值仿真
以受垂向点力激励的矩形简支钢板振动声辐射为例进行基于零体积速度模态配置的结构声主动控制仿真。板长Lx=0.500 m、板宽Ly=0.350 m、板厚H=0.004 m、板密度ρs=7 850 kg/m3、杨氏模量E=2.1×1011N/m2、泊松比υ=0.3、各阶模态阻尼比均取为ξr=0.01、空气密度ρ=1.21 kg/m3、声速c=343 m/s、参考声功率为10-12W。板结构四边简支,坐标原点取在板的几何中心。激励力作用位置坐标为(x1,y1)=(0.100 m,0.050 m),幅值为F=1 N。仿真中结构采用基于Mindlin板弯曲理论的有限元方法进行模拟,声场采用Rayleigh积分进行计算,将板划分为20×14的单元网格,有限元和基于Rayleigh表面积分的边界元均采用四边形四节点等参单元。

(17)

(18)
采用有效独立法[14]选取5个控制点力,施加位置如图1所示。由第3章的耦合模态空间控制方法得到控制增益矩阵G,由式得到反馈控制力,对振动结构实施结构声主动控制。无控系统和闭环系统第1、4、8阶模态振型如图2所示。闭环系统前8阶振动模态的体积速度、固有频率和阻尼如表2所示。
(19)
同时,受控前后结构的其他阶振动模态的体积速度、固有频率和阻尼比没有变化。无控系统和闭环系统的体积速度、第1阶声辐射模态幅值和辐射声功率曲线分别示于图3、4、5。可以看到,在低频段(kl≤1.83,f≤200 Hz),无控系统和闭环系统的体积速度曲线、第1阶声辐射模态速度幅值曲线和辐射声功率曲线趋势一致,这验证了低频时振动结构的体积速度与辐射声功率近似成比例的结论。从图4可以看到,低频时闭环系统的第1阶声辐射模态幅值|y1c|远小于无控系统的第1阶声辐射模态幅值|y1|,达到了控制目的。从图5可以看到,低频时闭环系统的辐射声功率大幅低于无控系统的辐射声功率,这说明,本文所采用的零体积模态配置方法有效降低了结构低频振动声辐射。但在辐射声功率曲线的高频段(kl>1.83,f>200 Hz)可以发现,在第4、8阶固有频率附近闭环系统的辐射声功率较无控系统有所升高,下面对该现象进行分析。
表1无控系统前8阶振动模态体积速度、固有频率和阻尼比Table1Thefirsteightvibrationmodevolumevelocities,naturalfrequenciesanddampingratiosofuncontrolledsystem
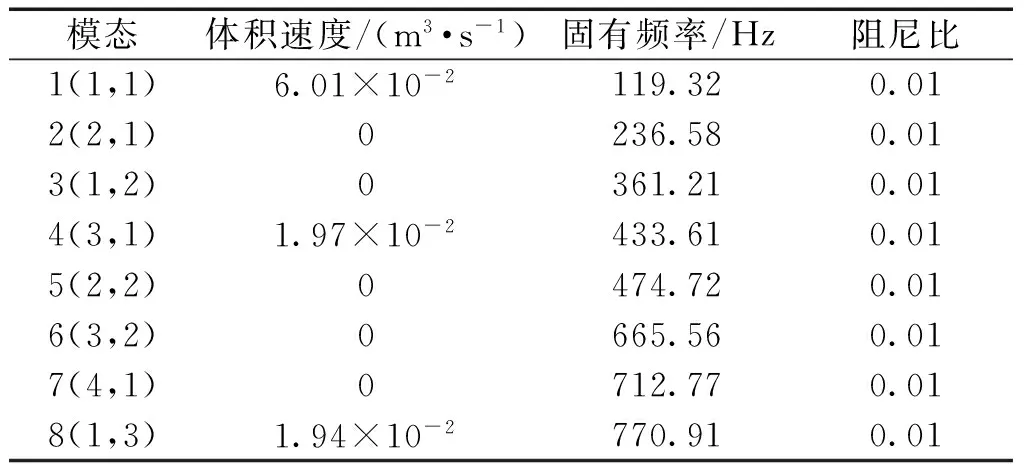
模态体积速度/(m3·s-1)固有频率/Hz阻尼比1(1,1)6.01×10-2119.320.012(2,1)0236.580.013(1,2)0361.210.014(3,1)1.97×10-2433.610.015(2,2)0474.720.016(3,2)0665.560.017(4,1)0712.770.018(1,3)1.94×10-2770.910.01
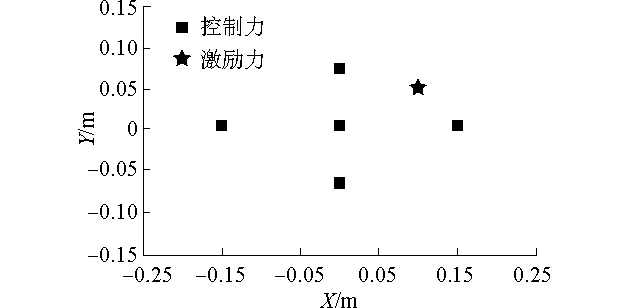
图1 控制力施加位置和激励力施加位置Fig.1 Positions of control force and excitation force
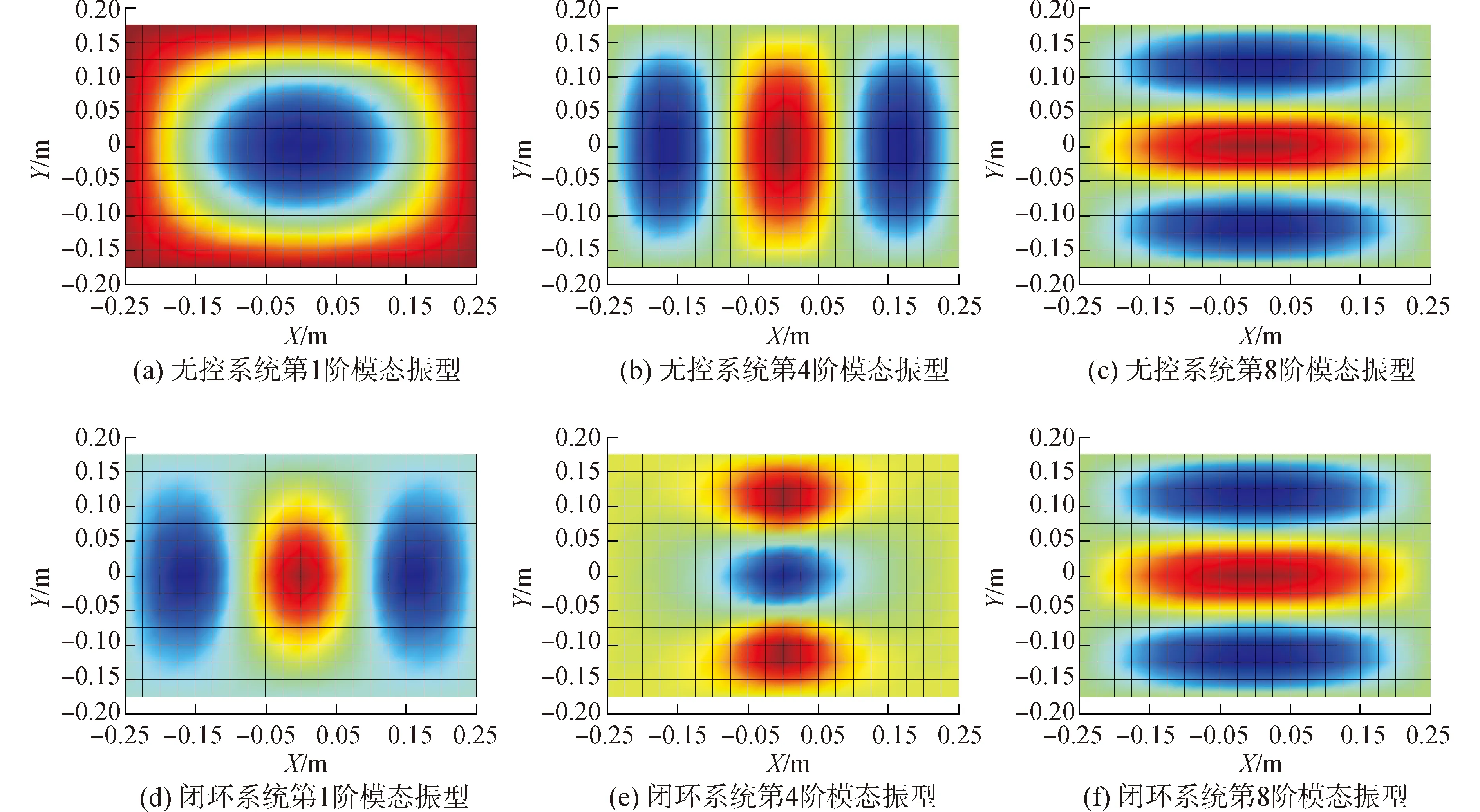
图2 无控系统和闭环系统第1、4、8阶模态振型Fig.2 The first, fourth and eighth mode shapes of uncontrolled and closed loopsystem
对于该简支板,若仅考虑前6阶声辐射态,则
W≈λ1|y1|2+λ2|y2|2+λ3|y3|2+λ4|y4|2+λ5|y5|2+λ6|y6|2
(20)
由于矩形简支板的振动模态和声辐射模态都具有对称或反对称的特点[15]。则第2、3、4阶声辐射模态与无控系统的第1、4、8阶振动模态的结构表面法向分量的内积均为零[15],即
(21)
而第1、5、6阶声辐射模态与无控系统的第1、4、8阶振动模态的结构表面法向分量的内积均不为零,即
(22)
表2闭环系统前8阶振动模态体积速度、固有频率和阻尼比
Table2Thefirsteightvibrationmodevolumevelocities,naturalfrequenciesanddampingratiosofclosedloopsystem
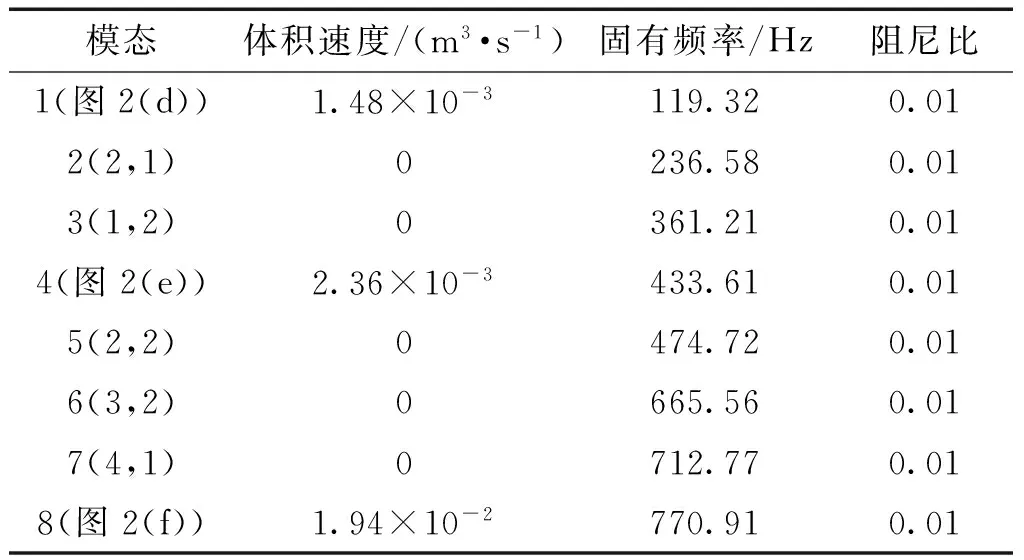
模态体积速度/(m3·s-1)固有频率/Hz阻尼比1(图2(d))1.48×10-3119.320.012(2,1)0236.580.013(1,2)0361.210.014(图2(e))2.36×10-3433.610.015(2,2)0474.720.016(3,2)0665.560.017(4,1)0712.770.018(图2(f))1.94×10-2770.910.01
由于闭环系统的第1、4、8阶振动模态为无控系统的第1、4、8阶振动模态的线性组合,因此,第2、3、4阶声辐射模态与闭环系统第1、4、8阶振动模态的结构表面法向分量的内积也零,即
(23)
而第1、5、6阶声辐射模态与闭环系统的第1、4、8阶振动模态的结构表面法向分量的内积均不为零,即
(24)
则由式(21)和式(23)可知,控制力对结构的第2、3、4阶声辐射模态没有影响,即|y2|=|y2c|,|y3|=|y3c|,|y2|=|y2c|;由式(22)和式(24)可知,控制力对结构的第1、5、6阶声辐射模态有影响,即|y1|≠|y1c|,|y5|≠|y5c|,|y6|≠|y6c|。同时,由于控制力对特征值λ没有影响,则由式(20)可知,控制力是通过改变振动系统的第1、5、6阶声辐射模态幅值来改变结构声辐射的。无控系统和闭环系统的第1、5、6阶声辐射模态幅值示于图6。可以看到,在第4阶固有频率(433.61 Hz)附近,闭环系统的第1、5、6阶声辐射模态幅值分别大于无控系统的第1、5、6阶声辐射模态幅值,即|y1c|>|y1|,|y5c|>|y5|,|y6c|>|y6|。这样,对于前6阶声辐射模态,在第4阶固有频率附近,闭环系统的第2、3、4阶声辐射模态幅值没有变化,而第1、5、6阶声辐射模态幅值明显升高,最终导致总的辐射声功率的升高。在第8阶固有频率(770.91 Hz)附近也由于该原因导致闭环系统辐射声功率高于无控系统辐射声功率。
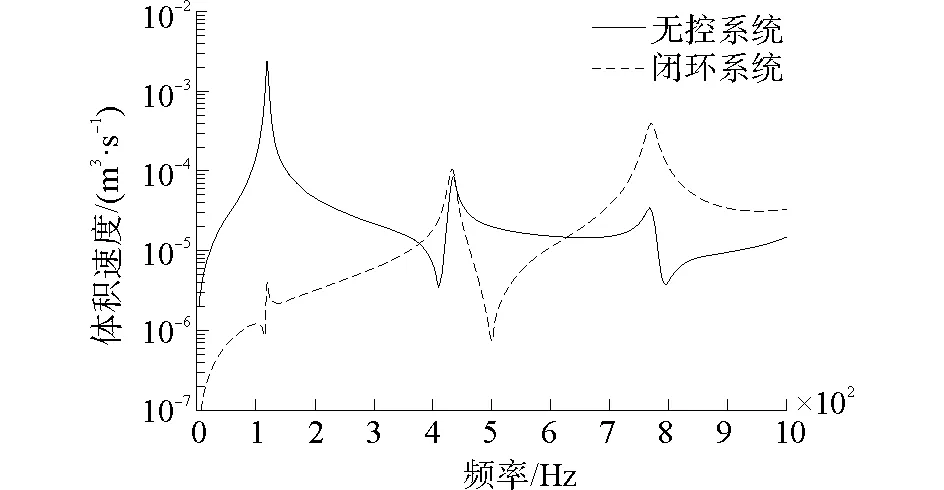
图3 无控系统和闭环系统的体积速度Fig.3 The volume velocities of uncontrolled and closed loop system
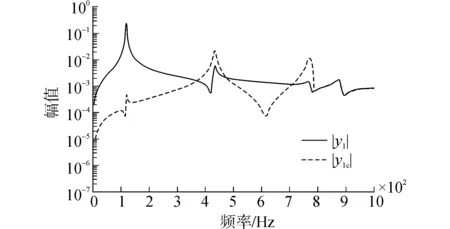
图4 无控系统和闭环系统第1阶声辐射模态幅值Fig.4 The first acoustic radiation modal amplitudes of uncontrolled and closed loop system
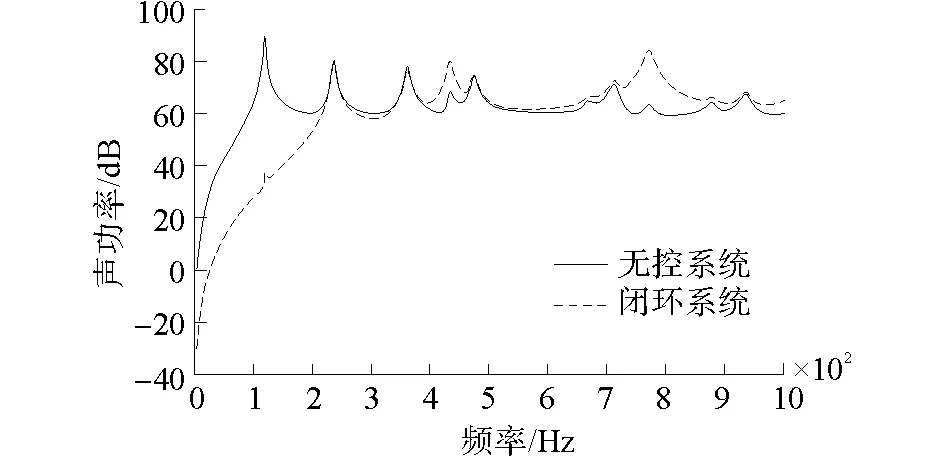
图5 无控系统和闭环系统辐射声功率曲线Fig.5 The acoustic radiation power curves of open and closed loop system
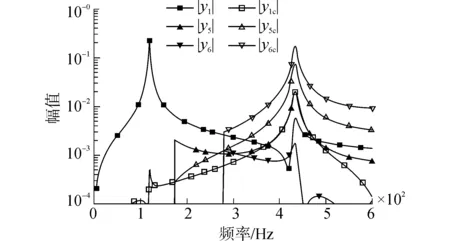
图6 无控系统和闭环系统第1、5、6阶声辐射模态幅值Fig.6 The first, fifth and sixth acoustic radiation modal amplitudes of uncontrolled and closed loop system
5 结论
1)本文提出了采用耦合模态控制法对闭环系统进行零体积速度模态配置,进而控制结构低频振动声辐射的方法。该结构声主动控制方法具有物理意义明确、控制过程简单、控制率的设计与激励力大小和位置无关等特点。
2)对矩形简支板进行了结构声主动控制仿真,结果表明,该方法可以有效控制结构的低频声辐射。
3)对仿真结果进行分析发现,闭环系统在高频区域部分频率附近会出现辐射声功率升高的现象,本文也对此进行了详细的分析。
[1] FULLER C R, ELLIOTT S J, NELSON P A. Active control of vibration[J]. Physics today, 1997, 50(50): 313-326.
[2] FULLER C R, ROGERS C A, ROBERTSHAW H H. Control of sound radiation with active/adaptive structures[J]. Journal of sound & vibration, 1992, 157(1): 19-39.
[3] FULLER C R, HANSEN C H, SNYDER S D. Experiments on active control of sound radiation from a panel using a piezoceramic actuator[J]. Journal of sound & vibration, 1991, 150(2): 179-190.
[4] 黎胜. 水下结构声辐射和声传输的数值分析及主动控制模拟研究[D]. 大连:大连理工大学, 2001:8-9. LI Sheng. Numerical analysis and active control simulation of underwater structural acoustic radiation and transmission [D]. Dalian: Dalian University of Technology, 2001: 8-9.
[5] BURDISSO R A, FULLER C R. Design of active structural acoustic control systems by eigenproperty assignment[J]. Journal of the acoustical society of America, 1994, 96(3): 1582-1591.
[6] ELLIOTT S J, JOHNSON M E. Radiation modes and the active control of sound power[J]. Journal of the acoustical society of America, 1993, 94(4): 2194-2204.
[7] TOHNSON M E, ELLIOTT S J. Active control of sound radiation using volume velocity cancellation[J]. Journal of the acoustical society of America, 1995, 98(4): 2174-2186.
[8] WU T T, CHUNG Y L. Structural acoustic reduction via piezoelectric actuation and adaptive eigenvector optimization algorithm[J]. Journal of intelligent material systems & structures, 2010, 21(21): 1797-1808.
[9] MEIROVITCH L, BARUH H. The implementation of modal filters for control of structures[J]. Journal of guidance control & dynamics, 1984, 8(6): 707-716.
[10] SERRA M, RESTA F, RIPAMONTI F. Dependent modal space control[J]. Smart materials & structures, 2013, 22(10): 622-629.
[11] LI Z, GUIGOU C, FULLER C R, et al. Design of active structural acoustic control systems using a nonvolumetric eigenproperty assignment approach[J]. Journal of the acoustical society of America, 1997, 101(4): 2088-2096.
[12] 黎胜,赵德有. 结构声辐射的振动模态分析和声辐射模态分析研究[J]. 声学学报, 2004, 29(3): 200-208. LI Sheng, ZHAO Deyou. Research on modal analysis of structural acoustic radiation using structural vibration modes and acoustic radiation modes [J]. Acta acustica, 2004, 29 (3): 200-208.
[13] 孙超,赵德有. 板声传输主动控制辐射模态控制方法研究[J]. 哈尔滨工程大学学报, 2010, 31(1): 8-14. SUN Chao, ZHAO Deyou. Application of a sound radiation control method to actively control sound transmission through plates[J]. Journal of Harbin Engineering University, 2010, 31(1): 8-14.
[14] 刘伟,高维成,李惠,等. 基于有效独立的改进传感器优化布置方法研究[J]. 振动与冲击, 2013, 32(6): 54-62. LIU Wei, GAO Weicheng, LIU Hui, et al. Improved optimal sensor placement methods based on effective independence [J]. Journal of vibration and shock, 2013, 32 (6): 54-62.
[15] 李双. 基于模态分析方法的有源声学结构研究[D].西安: 西北工业大学, 2007: 21-22. LI Shuang. Research on active acoustic structure based on modal analysis approach[D].Xi′an:Northwestern Polytechnical University, 2007: 21-22.
Activestructuralacousticcontrolbasedonzero-volumevelocitymodeassignment
BAI Jin1,2, LI Sheng1,2, XIA Maolong1,2
(1.State Key Laboratory of Structural Analysis for Industrial Equipment, Dalin University of Technology, Dalian 116024, China; 2.School of Naval Architecture, Dalian University of Technology, Dalian 116024, China)
10.11990/jheu.201605048
http://www.cnki.net/kcms/detail/23.1390.u.20170427.1523.118.html
TB535
A
1006- 7043(2017)09- 1385- 06
2016-05-16. < class="emphasis_bold">网络出版日期
日期:2017-04-27.
白金(1989-), 男, 硕士研究生; 黎胜(1973-), 男, 教授,博士生导师.
黎胜,E- mail: shengli@dlut.edu.cn
本文引用格式:白金,黎胜,夏茂龙. 基于零体积速度模态配置的结构声主动控制[J]. 哈尔滨工程大学学报, 2017, 38(9): 1385-1390.
BAI Jin, LI Sheng, XIA Maolong. Active structural ac oustic control based on zero- volume velocity mode assignment[J]. Journal of Harbin Engineering University, 2017, 38(9): 1385-1390.
