基于跟踪连续性的多传感器多跟踪任务管理方法*
2017-10-16陆战锋王成伟陈华杰
陆战锋,王成伟,陈华杰
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州 310018)
基于跟踪连续性的多传感器多跟踪任务管理方法*
陆战锋,王成伟,陈华杰
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州 310018)
雷达组网系统中,当进行多目标连续性跟踪时,传统跟踪方法过多关注多传感器之间的跟踪精度和切换率,而轻视跟踪的连续性,无法满足现有连续性跟踪工程需求。因此,提出了一种新的基于跟踪连续性的多传感器多跟踪任务资源管理算法,该算法分为两个优化过程,第1次优化过程尽量保证跟踪目标个数的最大化,第2次优化过程中提出了一种用于衡量目标跟踪连续性的优化指标,基于该指标,提出了一种快速的传感器资源管理算法。仿真结果表明,该算法能够在较短的时间内对多传感器进行有效的快速分配,既跟踪了更多的目标,又保持了跟踪的连续性。
资源管理算法,连续性跟踪,快速分配
Abstract:In the Radar networking system,when it goes on the multi-objective tracking continuitily,the traditional tracing method always focus on multi-sensor tracking precision and rate of switch,and despise the continuity of tracking,unable to meet the demand of existing continuous tracking project.Therefore,this paper proposes a new tracking continuity of multi-sensor tracking task resource management algorithm,the algorithm is divided into two optimization process,the first is to guarantee the maximum number of target can be tracked as far as possible,the second is to put forward in the process of a kind of used to measure the optimizing index of target tracking continuity,based on the index,this paper proposes a fast algorithm of sensor resource management.The simulation results show that the algorithm can in a relatively short period of time to effective fast distribution of multi-sensor,both tracked more targets and maintain the continuity of the tracking.
Key words:management algorithm,continuous tracking,rapid distribution
0 引言
现代防空预警体系多采用雷达组网系统,充分利用多个传感器组合跟踪的优势,建立目标的综合跟踪系统[1]。传感器资源管理方法通过对多个传感器的跟踪任务合理分配,不仅可以较好地完成目标跟踪任务,而且可以节约雷达资源,并将雷达资源利用效率最大化,传统的资源管理算法包括基于信息熵值[2]、线性规划方法[3]、协方差的控制技术[4]和目标威胁度的管理方法[5]等。在此基础上,后续相继提出了基于协方差控制的多传感器分配方案[6],基于跟踪反馈的多传感器跟踪方案[7]、基于精度跟踪的多传感器分配方案[8]等等。
尽管这些研究取得了很多成果,但是目前已有的大部分多传感器管理算法都是以目标的跟踪精度或类似原则为分配准则。而通常在实际战场中,目标是否能被跟踪是首要需求。此外,如果同一个传感器可以连续跟踪一个目标,获得该目标的连续位置信息,则可以大大提高后期目标跟踪滤波算法的跟踪精度,对于跟踪滤波算法的有效性也具有重要意义。因此,目标跟踪的连续性也是传感器资源管理算法需要考虑的原则之一。
针对以上问题,本文根据战场实际需求,提出了一种新的雷达组网多目标跟踪任务资源管理算法,该算法以目标跟踪数目和目标跟踪连续性为优化目标,在雷达资源约束下,实现基于多目标多传感器跟踪任务的快速分配。
1 基于跟踪连续性的多传感器多跟踪任务管理算法的数学模型
本算法所实现的目标有两个,第1个保证跟踪目标数目的最大化,在多目标多传感器的环境中,应该最大化保证跟踪较多的目标。第2个目标便是跟踪的连续性,本文结合目标相对于传感器的运动趋势,以及目标与传感器之间的距离信息等因素,应用了雷达权重计算方法,提出了基于目标跟踪连续性的雷达组合权重门限Limit_Same和跟踪非连续雷达组合权重门限Limit_Diff的两个概念,其中,Limit_Same主要是用来约束相邻两个时刻用来连续跟踪的雷达的个数,Limit_Diff主要用来约束相邻两个时刻非连续跟踪的雷达的个数。二者的运用,避免在多个雷达同时探测到同一目标时,马上“抛弃”之前分配的雷达,“硬生生”的切换给另外雷达的问题,这样平稳的切换方式可以保证前一时刻分配的雷达在当前时刻也可以跟踪目标,保持连续性跟踪,同时在一定程度上也提高了目标的跟踪精度。由于目标的优先级的不同,针对不同的目标,结合本段的表述,现将本算法的目标函数以及约束条件归纳如下:
本算法的目标函数如下:
本算法的约束条件为:
式(1)表示跟踪目标数目的最大化,N表示目标的个数,M表示雷达的个数,表示雷达j相对于目标的权重,Y1(i)表示对目标i的分配中,与前一时刻的相同雷达的组合,Y2(i)表示对于目标i的分配中,与前一时刻的不同雷达的组合。Y1(i)、Y2(i)都是1*M的矩阵。E为组网内雷达的能量资源边界。本算法可以用雷达最大跟踪数目作为雷达的能量资源边界。
2 算法实现过程
由于该算法的实现目标可知,第1个就是保证跟踪目标数目的最大化,这是在实际仿真环境下,首要达到的目标。第2个主要是在保证一定的跟踪精度和传感器切换要求下,最大限度保证跟踪的连续性。因此,本算法采用了两次分配的规则,第1次分配保证跟踪目标的最大化,第2次保证跟踪目标的连续性。
2.1 第1次分配实现过程
本算法在第1次分配实现过程中,坚持3个规则,即:①优先分配优先级较高的目标;②只让一个目标被一个雷达跟踪;③优先使用跟踪能力最弱的雷达。3个原则的目的是实现第1个优化目标:将跟踪目标个数最大化。
具体的分配步骤如下:
(1)将跟踪目标按优先级从高到底排序记为跟踪矩阵Target,建立雷达可用资源资源矩阵VRader,设定初始雷达资源总和为最大雷达资源。
(2)从跟踪矩阵Target中选取优先级最高的目标Target(j),j=1.在所有雷达中挑选可跟踪目标j的雷达,并将当前所有雷达按可跟踪目标个数从低到高进行排序,选取跟踪目标最低的雷达分配给j,同时更新可用资源管理矩阵VRader,并将对应的雷达可跟踪数目减1.
(3)令 j=j+1,重复步骤(2),直到所有目标均被雷达跟踪为止,从而完成雷达的第1次分配。
2.2 第2次分配实现过程
本算法在第2次分配实现过程中,目的是保证雷达跟踪目标的连续性。其算法思想为:通过与上一时刻跟踪该目标的雷达进行对比,从雷达组合中找到与上一时刻与本时刻相同的雷达和不同的雷达。然后通过Limit_Same,Limit_Diff两个门限判定,从相同的雷达中选出一部分雷达,不同雷达中选出一部分雷达,将两者结合,即为第2次分配的结果。以此往复,直到所有的目标分配完成。
假定该次是第k时刻的分配,具体的分配过程如下:
(1)将跟踪目标按照优先级进行递减排序,优先分配目标威胁程度较大的目标,并将排序目标放入矩阵 I(p)中。
(2)令p=1,在雷达带规划矩阵L1中选取可以用来跟踪I(1)的雷达,并与K-1时刻跟踪I(1)的雷达相比较,相同的雷达放入矩阵same中,不同的雷达放入矩阵diff中。
(3)将矩阵same、diff中的可用雷达按照雷达的优先级进行排序,更新矩阵same、diff。设置相同雷达跟踪优先级权限 Limit_same(I(p)),和不同雷达跟踪优先级权限Limit_diff(I(p))。
(4)选取矩阵same中第1位雷达,若第1位满足相同雷达跟踪优先级权限,则进入步骤(5),若不满足,选取前两位雷达进行计算,以此往复,直到满足约束。若same中所有雷达都不满足,则选取所有same中雷达,并进入步骤(5)。
(5)选取矩阵diff中第1位雷达,若第1位满足不同雷达跟踪优先级权限,则进入步骤(4),若不满足,选取diff前两位雷达进行计算,以此往复,直到满足约束。若same中所有雷达都不满足,则选取所有diff中雷达,并进入步骤(4)。
(6)将步骤(4)和步骤(5)中的雷达进行加和,就是对目标I(1)的第2次分配结果。
(7)令p=p+1,直到所有目标分配结束,则第2次分配结束。
3 仿真与分析
本算法以10部雷达跟踪4个目标进行仿真环境构建,每个雷达最多可跟踪4个目标,目标的优先级分别为[0 1 2 3],本次仿真假定约束条件为最大跟踪能力约束,无相对距离约束。即假定所有的目标都可以被所有的雷达探测到。假设跟踪连续传感器组合权重门限Limit_Same为1.2,跟踪非连续传感器组合权重门限Limit_Diff为0.6。仿真时刻为200s,并与传统多传感器多跟踪任务管理算法[8]进行对比。
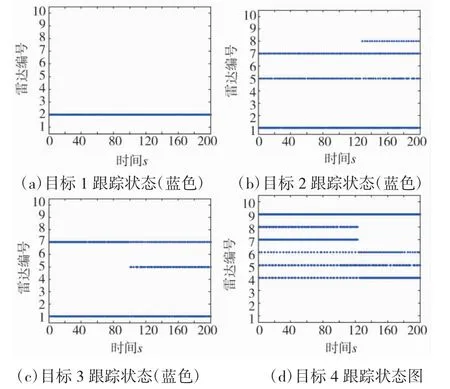
图1 传统多传感器多跟踪任务管理算法对目标跟踪状态图
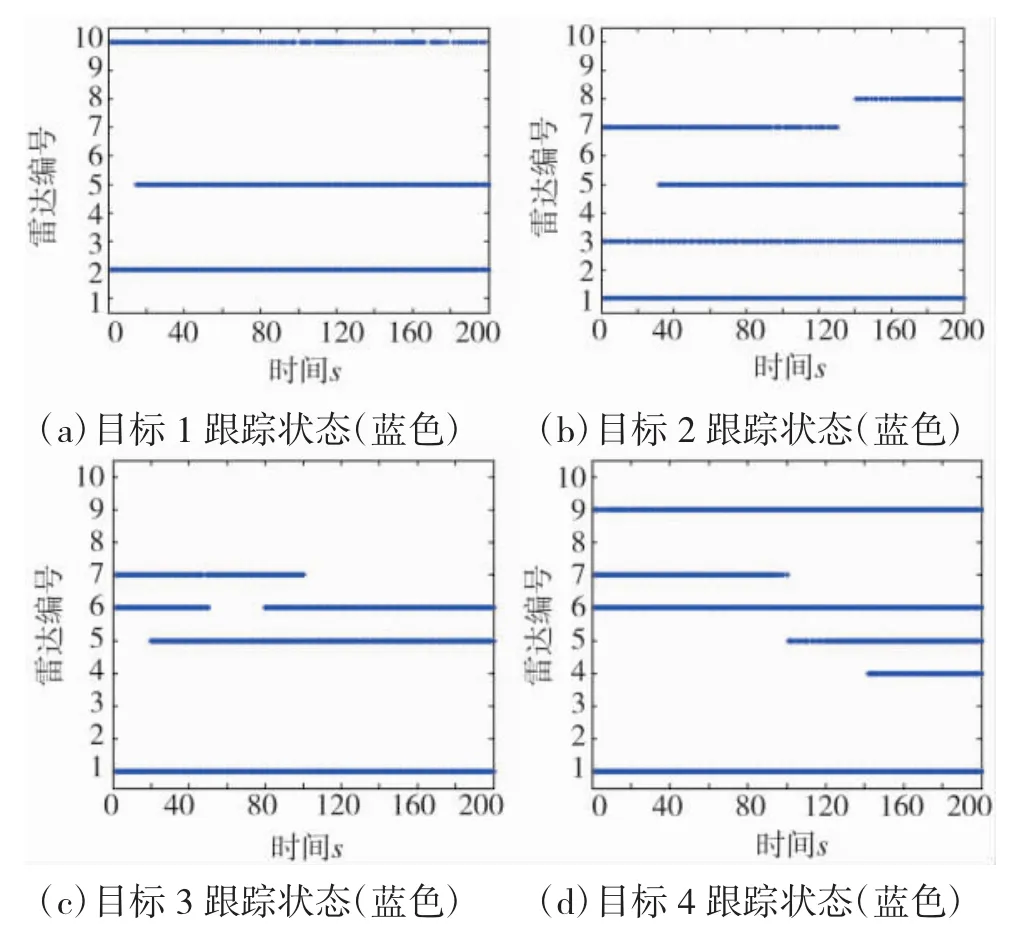
图2 采用本算法对目标跟踪状态图
通过仿真,由图1可知,传统多传感器多跟踪任务管理算法在对较高优先级的目标3、目标4的跟踪中,有多部雷达同时参与协同跟踪,能保持一定的持续跟踪能力,但对优先级低的目标1、目标2跟踪效果并不好,会出现失跟、漏跟的现象,而在多目标复杂场景中,失跟现象会更为严重。由图2可知,采用本算法对目标进行跟踪,每个目标都能做到有多部雷达参与持续性跟踪,能够较大限度地保持对高优先级(目标3、目标4)和低优先级(目标1、目标2)的目标进行跟踪,在多目标跟踪情况下跟踪效果更好。

表1 采用两种算法跟踪率对比
由表1可知,两种算法相同场景目标跟踪率对比的情况下,从目标的跟踪率角度可以看出本算法在连续性跟踪方面的优势,本算法在对高优先级和低优先级目标跟踪时,都能保持多部雷达平缓切换跟踪,大大降低了失跟、漏跟现象,对目标的跟踪率维持在90%以上。而传统多传感器多跟踪任务管理算法由于过分地强调目标函数的精度值,进而造成优先级低的目标能效远远低于优先级高的能效,使雷达资源过分地用在优先级较高的目标上,最后导致目标跟踪丢失等问题的出现,故同等仿真条件下其目标跟踪率维持在50%~70%之间。从以上分析可知,本算法相对于传统多传感器多跟踪任务管理算法在对目标进行连续性跟踪层面,具有跟踪率高的优点,并能稳定保持持续性跟踪。
4 结论
针对当前多传感器多跟踪任务管理算法的研究中过多针对跟踪精度和切换率的深入,而忽略对跟踪连续型的研究,本文提出了一种基于跟踪连续性的多传感器多跟踪任务管理算法。该算法主要分为两次分配。第1次分配主要实现目标跟踪率最大化。第2次分配主要从跟踪连续性角度出发,提出了跟踪连续雷达组合权重门限Limit_Same,跟踪非连续雷达组合权重门限Limit_Diff概念。通过仿真和分析,得出结论:本算法与传统多传感器多跟踪任务管理算法相比,具有跟踪率高,并能保持连续性跟踪等优点。
[1]WALTZ E,LLINAS J.Multi-sensor data fusion [M].MA:Artech House,1990.
[2]胡俊波,吴学智.一种基于DGDL传感器管理优化策略[J].计算机测量与控制,2005,13(10):1155-1157.
[3]NASH J M.Optimal allocation of tracking resources[C]//ProceedingofIEEEConferenceonDecisionandControl,1977.
[4]KALANDROS M,PAO L Y.Covariance control for multi-sensor systems[J].IEEE Trans.on AES,2002,38(4):1138-1157.
[5]崔博鑫,许蕴山,夏海宝,等.基于任务控制的动态多传感器管理方案[J].系统工程与电子技术,2012,34(12):2473-2478.
[6]周文辉,胡卫东,余安喜,等.基于协方差控制的集中式传感器分配算法研究[J].电子学报,2003,31(12A):2158-2162.
[7]徐松柏.基于跟踪反馈的相控阵雷达宏微观资源管理技术研究[D].杭州:杭州电子科技大学,2014.
[8]王成伟,陈霄,薛安克.一种基于多目标的雷达组网传感器资源管理算法[J].火力与指挥控制,2016,41(5):89-92.
A Multi-sensor Resource Management Method of Radar Networking Based on Multi-targets Tracking Continuity
LU Zhan-feng,WANG Cheng-wei,CHEN Hua-jie
(Fundamental Science on Communication Information Transmission and Fusion Technology Laboratory,Hangzhou Dianzi University,Hangzhou 310018,China)
TN953
A
10.3969/j.issn.1002-0640.2017.09.004
1002-0640(2017)09-0018-03
2016-06-11
2016-08-09
国家自然科学基金(61104049);国家自然科学基金重点项目(61333009)
陆战锋(1988- ),男,河南周口人,研究生。研究方向:传感器管理。