基于A-SMGCS的航空器场面运行冲突探测研究
2017-10-16葛亚威孔建国
葛亚威,戴 雨,孔建国
(1.中国民用航空飞行学院 空中交通管理学院,四川 广汉 618307;2.中国民用航空西南地区空中交通管理局 重庆分局,重庆 400000)
基于A-SMGCS的航空器场面运行冲突探测研究
葛亚威1,戴 雨2,孔建国1
(1.中国民用航空飞行学院 空中交通管理学院,四川 广汉 618307;2.中国民用航空西南地区空中交通管理局 重庆分局,重庆 400000)
通过对目前机场场面航空器运行过程冲突探测的研究,结合A-SMGCS系统场面MLAT监视技术及TDOA定位技术,重点分析航空器跑道运行冲突和滑行道运行冲突两种类型,并建立数学网络模型。利用A-SMGCS系统监视模块与路由规划模块的结合,构建冲突探测系统框架,结合具体机场冲突探测告警参数,选择网格冲突探测法,并运用全局搜索算法,确定了航空器跑道冲突探测和滑行道冲突探测方案,对提升机场运行安全和运行效率具有重要意义。
A-SMGCS;MLAT;冲突告警;冲突探测
0 引言
随着机场航班起降架次的增长,为保障低能见度、高密度航班量和复杂紧急条件下的机场运行安全,同时兼顾提升场面运行的效率、容量、秩序以及满足未来机场运行的需求,国际民航组织ICAO提出了先进场面活动引导与控制系统(Advanced Surface Movement Guidance and Control System,A-SMGCS)[1]。
A-SMGCS包括监视功能(Ⅰ级)、控制功能(Ⅱ级)、路由规划功能(Ⅲ级)、引导功能(Ⅳ级)。通过检测和定位场面所有目标,自动识别所有飞机和车辆,防止地面交通冲突、跑道和限制区侵入,对地面交通状况中的各类冲突、危险及入侵进行探测和告警,通过人工或自动方式为飞机和车辆安排最优滑行路径,而引导功能是在路由规划功能的基础上,为活动目标提供引导。
汤新民等将A-SMGCS场面航空器路由规划分为初始路径规划、动态路由指派和实时路由更新三个阶段[2];唐勇等提出了一种基于空闲时间窗的路由规划方法,解决滑行路由优化性和计算量之间的矛盾[3],并且提出一种基于优先级的滑行路由调整方法,解决运行阶段路由计划调整实时性和优化性之间的矛盾;朱新平等针对A-SMGCS滑行道冲突预测与避免控制,提出基于事件反馈的闭环控制框架,采用Petri网建模滑行道运行过程并实现离散事件控制器[4];陈倩基于A-SMGCS并结合ADS-B等场面监视技术,提出了基于运行单元间隔的场面移动目标冲突探测方案,通过仿真实验验证其可行性[5]。
目前多点定位技术应用于机场场面监视,它具备定位精度高、冗余度好、识别能力强的特点,因此,通过分析A-SMGCS监视相关技术原理,提出航空器场面运行冲突探测的系统构架,构建航空器场面运行冲突探测方案,结合具体冲突告警参数,适应并满足不同机场对场面运行冲突探测告警的要求,解决跑道侵入和滑行冲突告警问题。
1 A-SMGCS系统场面监视技术
A-SMGCS是一种解决机场安全、效率和容量问题的机场场面活动引导和控制新技术。它能够在全天候、高密度航班流量和复杂机场环境条件下,实现对机场场面运动的航空器和车辆的实时监控和引导,有效地避免场面活动目标冲突的发生,能显著增强机场安全保障能力,特别是在低能见度条件下,A-SMGCS 能大幅度地提高机场场面运行的安全与效率[1]。
在Doc.9830文件中对A-SMGCS系统的监视、路由、引导和控制四项基本功能进行详细阐述,功能之间相互关联,协同工作,其相互之间的关系如图1所示。

图1 A-SMGCS系统功能之间的关系
A-SMGCS系统监视功能,对分析航空器场面运行冲突探测提供了监视源数据与指标,通过检测航空器、车辆和障碍物,采取适当的方法将信号反射及遮蔽等负面效应降至最低;航空器上需要有一个参考点以使A-SMGCS确定其位置;航空器的位置及识别数据应至少达到每秒更新一次[6]。
随着繁忙机场布局的日趋复杂,监视盲区较多,且无识别能力,中小机场无场监雷达,依赖目视管制,ICAO将多点定位技术MLAT确定为未来监视技术发展的主要方向,欧美等主要航空强国也在推进MLAT的应用,MLAT的研制生产、运行维护和政策标准以及设备体系也日趋完善[7]。
MLAT是一种新的监视技术,利用飞机应答机A/C模式、S模式应答信号、ADS-B信号、机载TACS信号以及其他机载信号,地面采用多个接收站,采用时间差测量或测向、测频、测幅等方式确定飞机或其他运动目标的位置,同时具备目标识别能力,如图2所示。


图2 MLAT多点定位技术原理
*注:Target为运动目标,F1,F2,F3为机载设备的三个接收机;d1,d2分别为F1,F2到运动目标的距离
MLAT多点定位技术原理:|d1-d2|=常数。双曲线表示到两点距离差是常数的点构成的线;三个接收机可产生两条双曲线,运动目标位置是两个双曲线的交点。
A-SMGCS系统MLAT多点定位技术采取TDOA定位方法(见图3),只需测量各站点接收信号时标,相对TOA、AOA和TOA/AOA定位技术相比,其工程实现较为容易[8]。

图3 TDOA定位技术
假设目标T位置(x,y),接收基站位置为(xi,yi),测量TDOA为τi,1,则有:

其中,m为接收基站个数。
2 航空器场面运行冲突探测
2.1 航空器场面运行冲突告警类型
2.1.1 跑道入侵
跑道入侵指在航空器起飞降落的跑道上出现未经许可的飞机、车辆或行人。
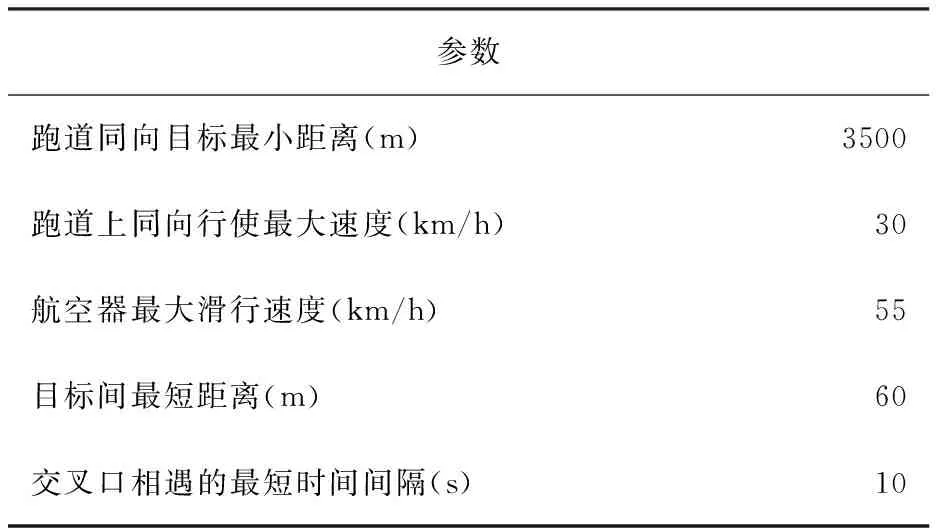
当飞机使用跑道进近着陆,地面目标位于该跑道保护区范围内,满足以下条件:(1)着陆飞机距离跑道入口距离D1,着陆目标距离跑道入口D2,D1+D2 图4 跑道入侵冲突告警示意图(1) 当飞机使用跑道起飞或处于TKF状态,前方有地面目标位于该跑道保护区范围内,满足以下条件:(1)后方起飞飞机滑跑,加速运动并且速度大于V;(2)前方飞机距离跑道入口小于D;(3)目标在跑道内或正在接近跑道(速度V和距离D为可配置参数)。将触发RIC告警(见图5)。 图5 跑道入侵冲突告警图(2) 2.1.2 滑行道冲突 滑行道冲突是指航空器滑行速度过大,航空器或车辆出现在未经许可的滑行道上,或者航空器与航空器之间、航空器与车辆之间的距离未满足最小安全距离。 当滑行道上的目标之间出现安全距离冲突或者发生碰撞趋势的可能时,出现以下情况,将会触发TWC(Taxiway Collision)告警。 (1)航空器在同一滑行道路段上,两个航空器间隔小于D并且目标正在不断接近,将触发TWC告警(见图6)。 图6 滑行道冲突告警图(1) 根据DOC.9830文件,航空器之间的最小安全间隔距离D应考虑到飞行员、管制员与A-SMGCS系统的响应时间、飞机的尾流效应,以及航空器制动性能等因素。 (2)两架航空器通过同一交叉口,通过交叉口的距离D1+D2 图7 滑行道冲突告警图(2) *注:距离D和时间T为可配置参数 2.1.3 滑行道死锁告警 滑行道目标进入封闭的滑行道区域,相互之间不能有序的滑行解脱,将会触发TDL(Taxiway Dead Lock)告警,如图8所示。 图8 滑行道死锁告警图 2.1.4 限制区告警ARV(Area Restriction Violation) 对于限制区可以通过设置时间和机型等限制条件,当满足所设置的限制条件时,航空器接近已设置的限制区,并且进入限制区的时间小于T时,将触发限制区告警;如果时间为0,则进入限制区后也会触发告警(时间T为可配置参数)。 2.2 冲突探测系统框架 机场场面航空器运行冲突探测需要A-SMGCS系统中场面监视模块和路由规划模块之间相互协作,如图9所示。 图9 航空器场面运行冲突探测系统框架 结合机场场面监视技术多点定位TDOA技术原理,场面监视模块提供了冲突探测所需要的观测数据,路由规划提供航空器的运动轨迹、离场次序等信息。在整个冲突探测过程中,包含了数据预处理、航空器场面运行轨迹预测以及航空器场面联合运行冲突探测。 数据预处理部分中的数据来自场面多点定位系统的监视数据,通过结合飞机应答机A/C模式、S模式应答信号、ADS-B信号、机载TACS信号以及其他机载信号,地面采用多个接收站,利用时间差测量、测向、测频及测幅等方式确定飞机的位置[9]。 另外,通过对监视数据的处理,包括位置、速度、加速度、航向等,结合路由规划模块,对航空器场面运行轨迹进行预测,从而对航空器场面运行进行冲突探测,需要注意的是,实时冲突探测需要优先进行处理。 A-SMGCS系统的控制、监视和路由功能的目的是防止在机动区域航空器、车辆及其他物体间发生碰撞,也可以进一步扩展为防止冲突。航空器在场面运行过程中,冲突告警主要表现在冲突探测和冲突预测。对于冲突探测,需要立即行动以避免碰撞,相对于冲突预测有较高的优先权,在场面运行过程中冲突告警优先权顺序:跑道冲突>滑行道冲突>停机坪/停机位/等机门冲突[5]。因此,针对目前场面监视系统日趋完善的基础上进行冲突的实时探测和预测,通过对某机场冲突探测参数分析(见表1),确定航空器在场面运行过程中冲突探测方案。 表1 冲突探测参数表 步骤1 构建跑道入侵区域,跑道入侵区域是一个三维的虚拟空间。空间区域的水平方向覆盖整个跑道,宽为跑道两边之间的距离,长为两跑道口之间的距离,垂直方向高于跑道表面。 步骤2 选择一种基于规则的设计的跑道冲突检测算法,将航空器实时划分为不同的状态,并建立基于状态的规则库[10](规则库包括滑行状态、预备起飞状态、起飞滑跑状态、爬升状态、着陆状态、减速滑跑状态和飞行穿越状态和其他地面状态)。 图10 网格法检测示意图 步骤3 将与跑道相连接的滑行道区域划分为细小的网格进行处理,网格法检测如图10所示,每一个网格都是具有检测能力的检测区域,明确航空器位置,初次定位时需要进行全局搜索。 步骤4 假设两航空器为A1和A2,计算所处的网格之间的间隔为ΔD1,2,两架航空器之间的距离为d1,2通过测量值和所处网格属性,计算航空器的运行方向与趋势,根据间隔结合滑行道的三种冲突: (1)两航空器相向而行,对头冲突; (2)两航空器同向而行,间隔冲突; (3)同向而行,后机速度V后大于前机速度V前,轨迹推测冲突。 由此可建立冲突约束条件如下: {d│d1,2≥3500}{ΔD│ΔD1,2≥60} 在滑行道上,Vmax≤55km/h,V前≥V后。 步骤5 对所处网格区域附近的航空器探测路径,寻找可能发生冲突的飞机,将这些航空器保存到自身冲突列表中,通过规则判断,计算出是否与冲突列表的航空器发生冲突。判断的规则包括:原有的距离间隔、交叉点相遇时间以及进入禁区或限制区。 本研究结合A-SMGCS监视技术中多点定位技术TDOA原理,着重分析并建立了航空器与航空器之间场面运行过程中跑道入侵冲突告警网络模型和滑行道冲突告警网络模型,提出航空器场面运行冲突探测的系统构架,结合机场具体冲突告警参数和网格区域检测算法对航空器冲突探测方案进行理论研究,对提升机场运行安全性和运行效率以及航空经济效益具有重要的意义。 本文主要对航空器场面运行过程冲突探测方案进行了理论研究,还有待进行实例验证。该研究较为单一的考虑A-SMGCS系统中多点定位技术原理,应该对多种监视技术进行综合分析,航空器场面运行过程中的冲突还应该考虑航空器与场面车辆、人员等因素,建立综合冲突探测方案并进行实例仿真验证。 [1] International Civil Aviation Organization.Advanced Surface Movement Guidance and Control Systems(A-SMGCS) Manual[EB/OL].(2004-01-01)[2017-04-20].https://wenku.baidu.com/view/9feee135eefdc8d376ee32ce.html. [2] 汤新民,王玉婷,韩松臣.基于DEDS的A-SMGCS航空器动态滑行路径规划[J].系统工程与电子技术,2010,32(12):2669-2675. [3] 唐勇,胡明华,黄荣顺,等.A-SMGCS航空器场面滑行路由实时调整策略[J].西南交通大学学报,2014,49(4):734-740. [4] 朱新平,汤新民,韩松臣.A-SMGCS滑行道冲突预测与避免控制[J].南京航空航天大学学报,2011,43(4):504-510. [5] 陈倩.基于A-SMGCS的机场场面移动目标冲突探测研究[D].南京:南京航空航天大学,2015. [6] 唐勇.A-SMGCS航空器滑行路由规划及三维仿真研究[D].南京:南京航空航天大学,2014. [7] WANL L,HU M H,TIAN Y,et al.Green Aircraft Taxiing Strategy Basedon Multi-scenario Joint Optimization[J]. Transactions of Nanjing University of Aeronauticsand Astronautics,2016,33(2):215-223. [8] RE F,CASTROY R D.Energetically Optimal Path Following for Electric Aircraft Taxi Systems based on Convex Optimization[C].ESARS 2014 International Electric Vehicle Conference,Florence,Dec16-18,2014. [9] 潘卫军,王玄,夏正洪,等.航空器热点区域的滑行避让方法[J].计算机工程与设计,2015,36(12):3324-3327,3384. [10] 牟奇锋,冯晓磊,向硕凌.机场场面冲突检测告警系统的设计与实现[J].四川大学学报(工程科学版),2015,47(4):104-110. [责任编辑、校对:李琳] Abstract:Through the study of the present process of conflict detection of airport scene aircraft operation,combined with the A-SMGCS system of surveillance technology of multi-point positioning technology and the principle of TDOA positioning technology,the paper focuses on the analysis of the aircraft runway in the runway conflict and taxiway conflict,and establishes the mathematical network model.Via the combination of A-SMGCS system monitoring module and routing module,the paper constructs the conflict detection system framework.Finally,the paper selects the grid conflict detection method according to specific airport collision detection alarm parameters,and uses the global search algorithm to determine the aircraft runway taxiway conflict detection and conflict detection scheme with high accuracy and pertinence. Keywords: A-SMGCS;MLAT;conflict alert;conflict detection ResearchontheConflictDetectionofAircraftSurfaceOperationBasedonA-SMGCS GEYa-wei1,DAIYu2,KONGJian-guo1 (1.College of Air Traffic Management,Civil Aviation Flight University of China,Guanghan 618307,China;2.Chongqing Air Traffic Control Branch,Southwest China Regional Air Traffic Management Bureau of Civil Aviation of China,Chongqing 400000,China) V351.11 A 1008-9233(2017)05-0014-05 2017-05-17 中国民航飞行学院研究生创新科研项目(X2016-43) 葛亚威(1993-),男,河南驻马店人,硕士研究生,主要从事空中交通管理研究。





3 航空器场面运行冲突探测方案

4 总结与展望
