基于多传感器信息融合的路面等级识别研究
2017-10-13胡益谦
胡益谦, 赵 丰
(1.中国人民解放军96271部队,洛阳 471600;2.北京航天控制仪器研究所,北京 100854)
基于多传感器信息融合的路面等级识别研究
胡益谦1, 赵 丰2
(1.中国人民解放军96271部队,洛阳 471600;2.北京航天控制仪器研究所,北京 100854)
针对车辆行驶路面等级识别的问题,通过采集与融合多种传感器的信号数据,提出一种基于小波包和经验模态分解(EMD)协同信号处理方法.通过最大相关最小冗余(MRMR)算法对特征子集进行优化,优质特征子集将进入概率神经网络分类器(PNN)与随机森林分类器组成的级联分类器进行训练与测试,得到最终路面等级分类结果.仿真结果显示,与使用单一传感器进行路面等级识别相比,分类结果正确率得到有效提高.
路面等级;信息融合;神经网络
Abstract:In order to slove the road ranking recoginition problem, a cooperated signal processing method based on wavelet packet and empirical mode decomposition(EMD) is used. After extracting the statistical characteristics of the signal, the feature subset is optimized by the maximum correlation minimum redundancy(MRMR) algorithm. The high quality feature subset will be the input of the PNN and random forest classifier for training and testing, and then the final road classification results are achiedved. Simulation results show that the accuracy of the classification results is improved compared with the results obtaned from the single level sensor.
Keywords: road profile classification;information fusion;neural network
路面不平度直接影响着车辆悬架的平顺性与可靠性设计,准确测量路面不平度与识别路面等级对车辆控制具有重要影响.目前,随着无人驾驶技术的发展,可通过传感器直接感知路面行驶工况,如车辆前部安装的摄像头以识别车道线的信息[1];在车头处安装超声波传感器检测行车前方的减速带或凹坑[2];车轮处安装光学传感器测量轮胎变形计算出路面高程[4],这些方法成本相对较高,不适用于坡度较陡或路况较差的路面.根据车辆动力学响应与传递函数反求路面不平度进行路面等级的辨识[3],这种方法依赖于车辆建模的精度,具有一定的局限性.
本研究借鉴数据挖掘与数据融合技术中的多分类器概念,提出一种基于多传感器信息融合的路面等级识别方法.此流程从车辆传感器数据的采集,信号处理得到特征集,进而到级联分类器中进行分类.簧载加速度、悬架动行程和车轮加速度信号经过小波与EMD协同处理后,其数据的统计特征集经过MRMR特征降维处理,优质特征子集进入级联分类器. PNN作为第一级分类器,分别得到3种传感器的分类结果,进而输入第二级随机森林分类器中,经过随机森林分类器的分类,最终得到路面分类结果.
1 四分之一车辆悬架模型
在实际应用中,悬架系统的加速度与动行程信号具有便于采集且一致性较高的特点[5],因此,选用簧载振动加速度、动行程和车轮垂向加速度进行数据的挖掘与融合.建立四分之一被动车辆悬架模型如图1所示.
图1 单轮车辆悬架模型示意图
根据牛顿第二定律,对所示车辆被动悬架建立动力学微分方程:

(1)
式中:簧载质量与车轮质量分别为mb与mw;车辆悬架的刚度系数为ks;轮胎刚度系数假设为线性变化,表示为kt;xr为路面高程变化量;簧载质量位移xb与车轮位移xw为四分之一悬架系统的两个自由度.
2 特征量的提取
基于小波包与经验模态分解(EMD)的信号变换方法,充分利用信号的时频分析技术,描述信号在不同分量的特征模态函数(IMF)所包含的特征信息.
2.1 基于小波包与经验模态分解的悬架振动响应分析
小波包分析是基于一组相互正交的小波函数构成的子空间,把信号投影到这个子空间进而使信号在不同尺度上展开.在小波包变换的过程中,需要选择合适的小波基函数以及分解尺度,且在整个信号的分解中只能使用固定的小波基,不同的小波基对同一信号的变换结果影响较大[6].
以簧载质量振动加速度信号为例,传感器信号首先经过截止频率为50 Hz 的低通滤波器,对其进行三层小波包分解,得到aA3(0~6.3 Hz)、aD3(6.3~12.5 Hz)和aD2(12.5~25 Hz)区间的频带信号.
EMD方法是根据信号本身包含的波动特征自适应地进行分解,具有准确获取信号低频成分的能力.若原始信号中含有噪声成份,会使EMD在分解中出现模态混叠现象,无法完成对复杂信号的分离,因此,EMD分解的抗干扰能力不强[7-8].
由于小波包和EMD各有优势与不足,所以本研究提出基于小波包和EMD的协同方法来进行信号特征的提取,充分利用小波包对染噪信号的消噪能力和强有力的信号定位能力.先把原始信号分解成为不同频率区间的窄带信号,使得特征频率落在目标频带内,进而利用EMD的自适应分解能力将窄带信号分解为相应的IMF分量[9].具体步骤如下:
1)用小波分别对簧载加速度信号,悬架动行程及车轮加速度信号进行去噪处理得到消噪后的信号.
2)针对需要分析的目标频率段,进行小波包分解.重构信号得到aA3(0~6.3 Hz)、aD3(6.3~12.5 Hz)和aD2(12.5~25 Hz)区间的信号.
3)对不同频率区间的信号用EMD方法进行分解提取前3个IMF分量.
4) 对各个IMF分量进行相关后续特征参数的提取.
2.2 悬架动态响应信号的特征参数提取
在基于小波包和EMD协同方法对这3个信号进行变换之后,需要从分量信号中提取具有路面等级差异的特征信息.并且对提取出的多个特征信息量进行选取,以减少后续分类的运算量,提高分类器的训练效率.
在不同国标等级路面的激励下,不同传感器的响应信号具有较大区别,通过引入统计学的方法对信号特征进行提取.统计学中的特征统计分为有量纲特征与无量纲特征[10],有量纲特征包括均值、均方差、有效值、方差、极值以及峰值,等等;无量纲特征包括波形指标、偏斜度、裕度以及脉冲指标,等等.在文献[11]中,已应用改进的距离评估技术,对上述有量纲和无量纲特征进行了选取,得到的时频特征参数有:1)最大值(Max.)(反映了信号局部的强度);2)均方根值(RMS);3)方根幅值(SRA);4)方差(Variance);
对传感器信号的时域和频域进行分析,所有特征参数如表1所示.
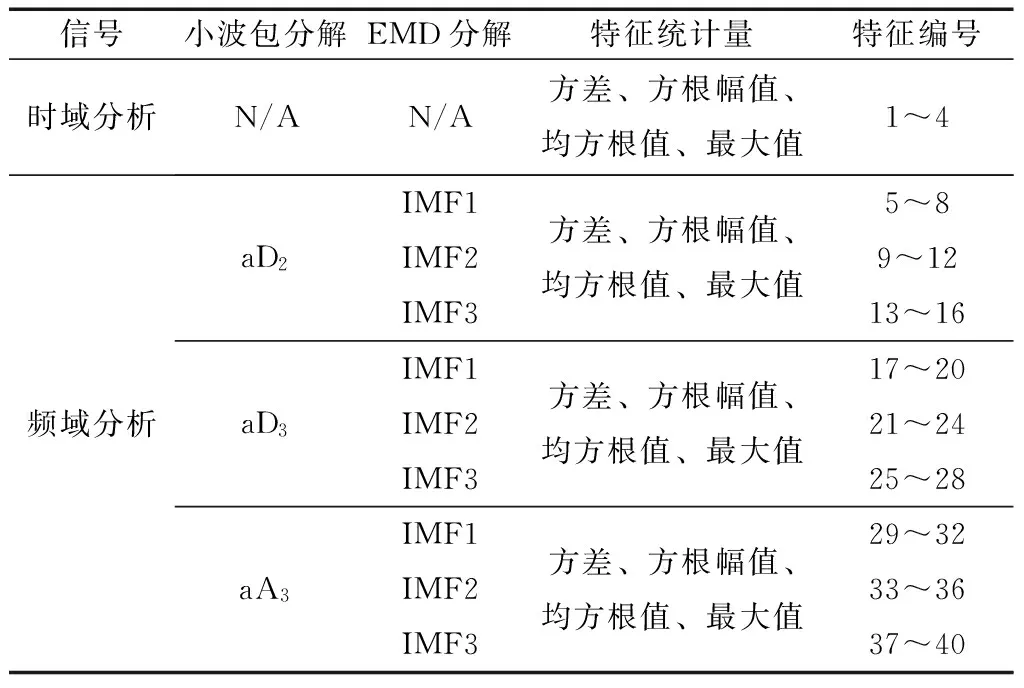
表1 传感器信号特征参数表
3 基于最大相关与最小冗余(MRMR)特征选择算法
从上面的描述可以看出,对于簧上加速度信号的频率信号分析中,3个频率区间经过EMD可以分解出9个IMF分量,每个IMF分量可以提取出4个参数特征.因此,簧上加速度信号在频域提取中一共可以提取出36个特征参数.为了避免分类器运算的复杂度,提高分类器的工作效率和预测准确度,这些特征参数在进入分类器之前,需要从这些原始特征参数中选择最为相关的特征,去除冗余信息和一些干扰信息,从而实现特征参数的降维,降低了后续分类器学习算法的复杂度.特征参数选择不改变原始信号的表达,只是选取特征参数中最能代表数据特点的最优子集.从特征之间的相关性和冗余性入手,本研究采用了基于空间搜索的最大相关最小冗余算法(MRMR)进行最优特征子集的选择.
将频率信号分析中提取的36个特征参数降至10个,与时域的4个特征参量和1个簧上质量合成最终的特征子集.
4 基于路面等级识别的级联分类器设计
特征原始集经过MRMR算法降维处理,得到最优特征子集.将簧载加速度、悬架动行程和车轮加速度各自的特征子集输入与之对应的第一层概率神经网(PNN)分类器,得到初步分类结果.PNN神经网络是由输入层、隐含层、求和层和输出层4个基本部分构成.输入层主要接收训练前提取的特征样本的值,进而传递到隐含层的神经元中.在隐含层与求和层中,传入的数据向量与神经元节点经计算得到中心距离,第i类样本模式的第j个神经元输入与输出如式(2)所示.

(2)
式中:fc(x)为根据输入的随机样本估计的原概率密度函数;xij为第j个路面激励响应的训练向量;m为训练样本数量;p为训练向量的维数;σ为平滑因子参数,合理地选取平滑因子参数对分类结果起着重要的作用.
在不同的路面等级激励下,3个传感器对应的初步分类结果的可信度是不一样的,应充分利用多传感器信息决策的优势,将初步分类的结果继续输入到第二层随机森林分类器中,进行信息融合,最终得到路面等级的识别结果.此方法将3个传感器在时域与频域信号的初步识别结果进行融合,降低了由于使用单一传感器受到干扰而引起分类误差的可能性,此级联分类器结构增强了分类器的抗干扰能力.基于多传感器信息融合的路面等级识别流程图如图2所示.
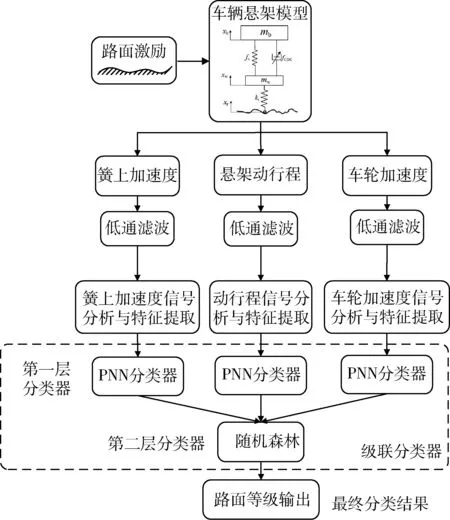
图2 基于车辆悬架动力学响应的路面等级识别流程
5 仿真结果及分析
运用谐波叠加方法生成不同路面等级的时域高程激励.路面时域不平度函数生成的表达式为[12]:

(3)
式中:φk为初相角,是满足{0,2π]区间内标准正态分布的随机数.并且对应于k=1,2,…,N中的N个φk彼此独立.
将车速为V对应的路面时间频率,在其对数坐标系下等间距Δf划分N段,设(fkl,fku)为第k个频率段,fkl和fku分别为该频率段的下限和上限频率.构造公式的幅值系数ak可以按式(4)确定.
(4)
n0为参考空间频率,n0=0.1 m-1;Gq(n0)是参考空间频率下的路面谱值,称为路面不平度系数,它的取值不同决定着不同的路面等级.当车速V给定后,相应的N段以ak作为幅值,fk作为频率的正弦波进行叠加,可求得路面时域随机输入的高程.
用于激励四分之一悬架模型的国标路面时域高程由5段组成,依次为ISO-B、ISO-C、ISO-D、ISO-E以及ISO-F.悬架模型中簧载质量为250 kg.激励悬架模型,进而生成车辆悬架动力学响应的测试数据样本.
为了便于分析,车辆路面识别的过程基于如下假设:
1)车辆保持匀速直线行驶,且车速为40 km/h;
2)生成间隔时间为30 s的时域高程激励,用于产生测试样本的悬架响应信号;
3)不同路面等级之间的切换时间忽略不计.
簧载质量为250 kg的悬架模型生成的30 s车辆悬架响应信号如图3所示.
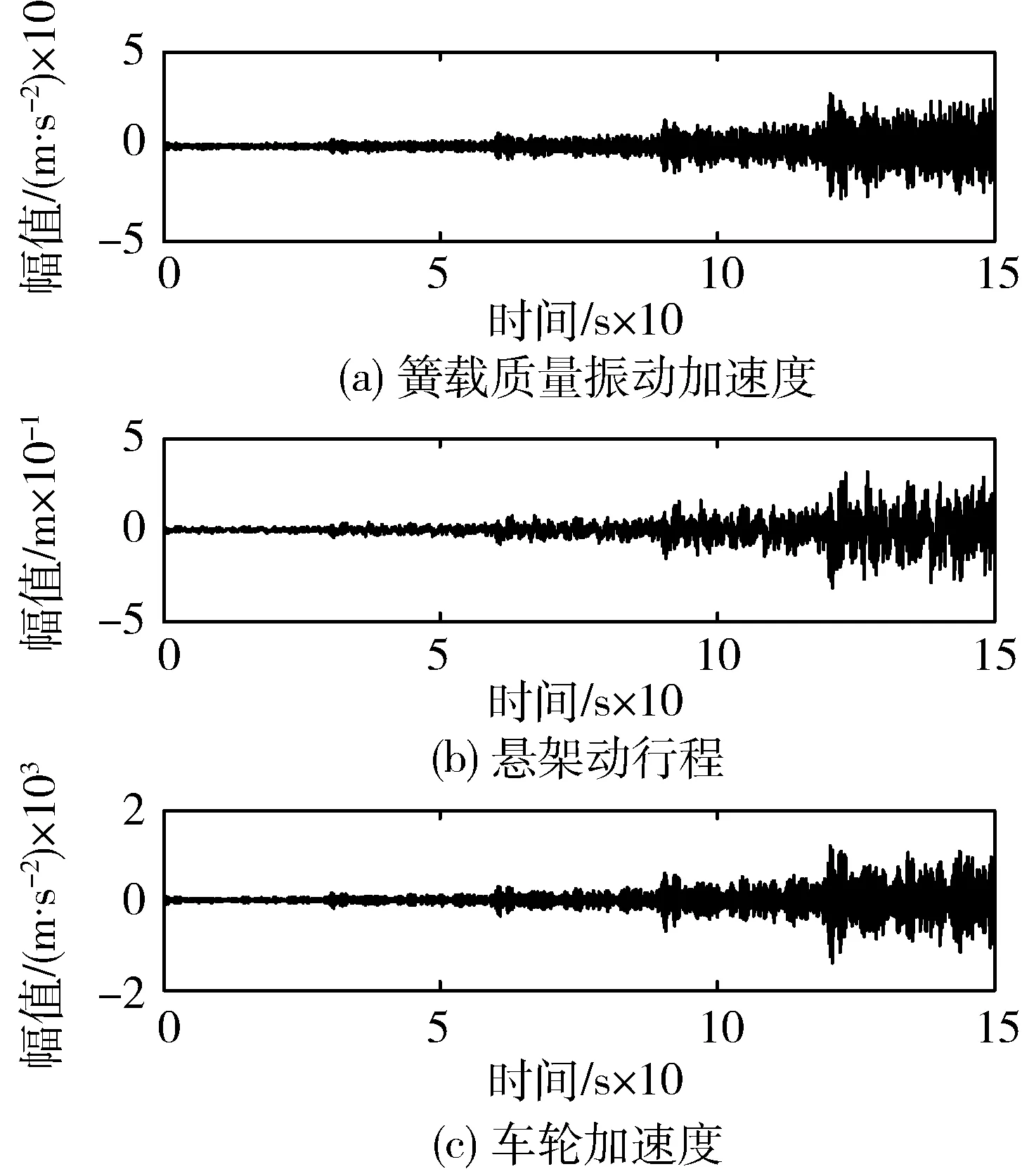
图3 簧载质量为250 kg下车辆悬架响应信号
信号的采样频率为1 000 Hz,低通滤波器截止频率为50 Hz.每个等级路面下,利用滤波加窗处理后得到的测试样本为30个.小波包的基函数设置为:经过对多种正交的小波基进行试凑的方式,最终选用db6作为本章的小波包基函数,选用这种小波包基函数可以对本识别算法取得令人满意的效果.PNN分类器的平滑因子参数σ取值为0.9,随机森林中的决策树个数设置为50.
特征子集中的15个特征参量在进入下一步的级联分类器之前,需要进行归一化处理,使所有的幅值归一化至[-1,1]之间,以方便对级联分类器中的神经网络进行训练.部分归一化后各路面等级的簧载质量加速度样本信号如图4所示.
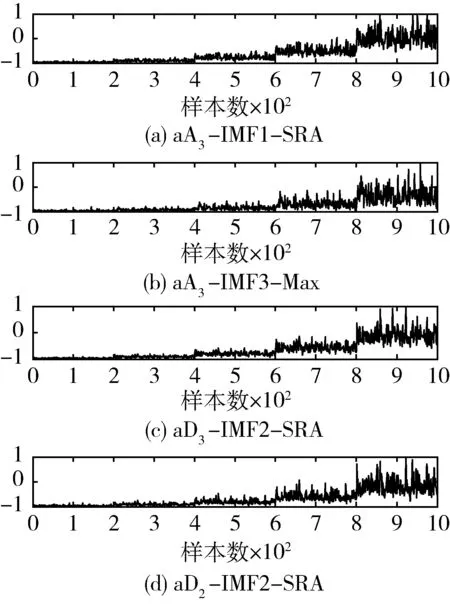
图4 各路面等级簧载质量加速度特征归一化后的样本
单独使用某一种传感器信号进行路面识别和采用本研究提出的基于传感器信息融合的路面识别结果如图5所示.
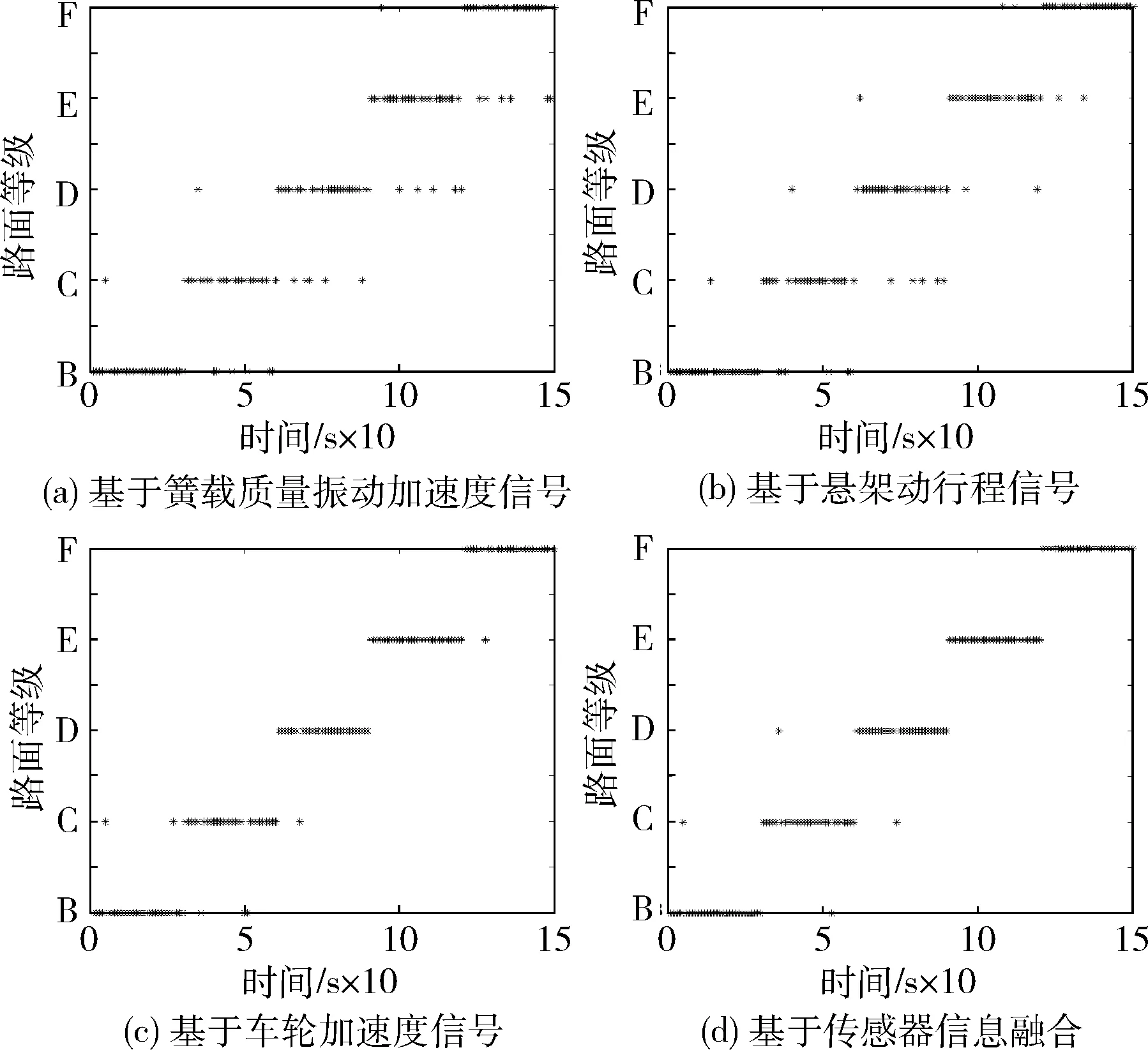
图5 路面等级识别结果散点图
统计上述各个传感器路面等级的识别结果,得到每个路面等级的识别准确率,如图6所示.
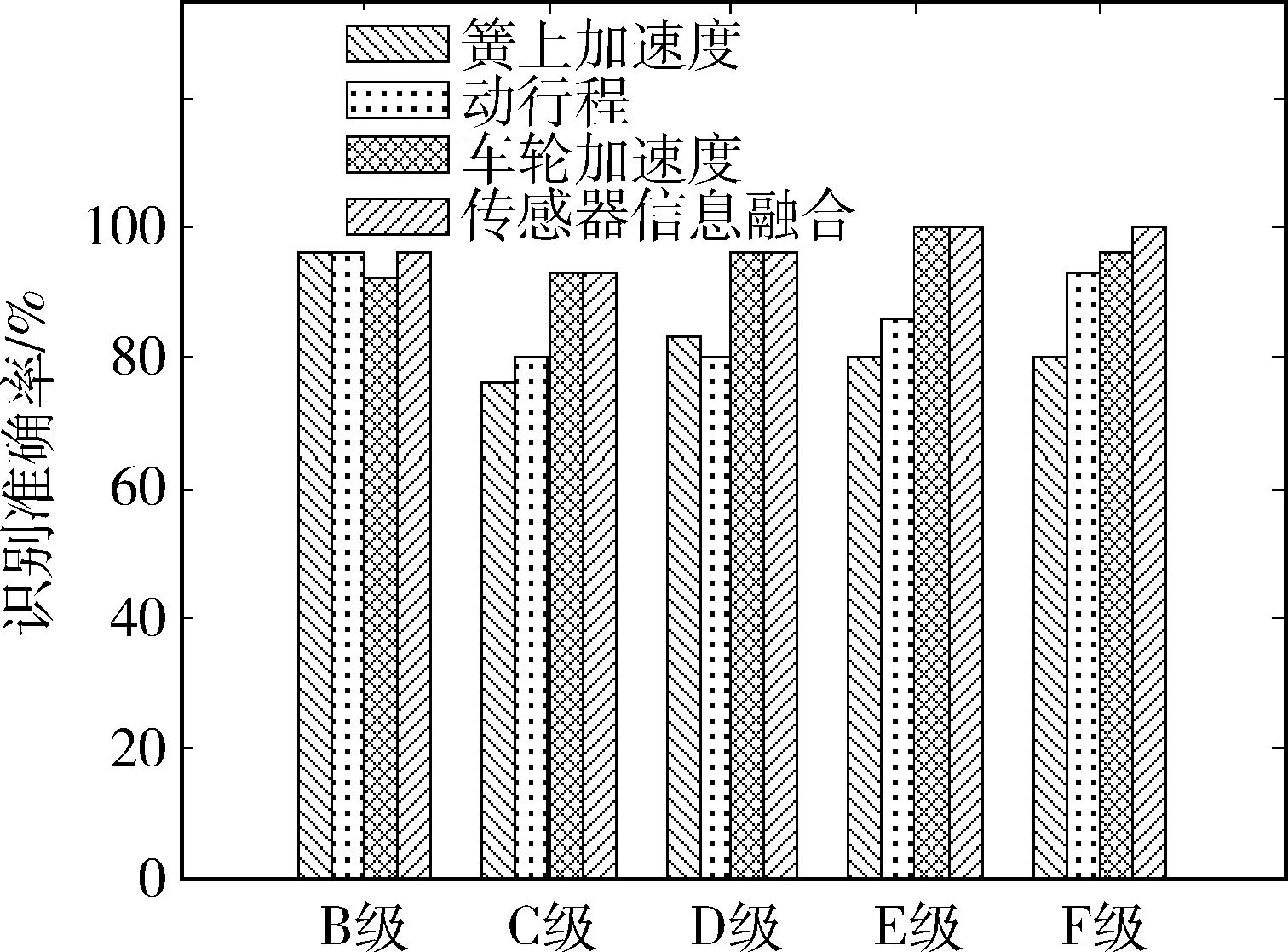
图6 路面等级识别结果条形图
6 结 论
本研究提出应用多传感器信息融合进行路面等级识别的方法.首先,采集簧载加速度、悬架动行程与车轮加速度信号,对采集后的数据进行三层小波包变换,选取小波包变换后的目标频率区间aA3(0~6.3 Hz)、aD3(6.3~12.5 Hz)和aD2(12.5~25 Hz),用EMD方法进行分解提取前3个IMF分量共9个子信号.从各个模态分量子信号中分别提取4个特征参数,通过MRMR最大相关与最小冗余算法进行特征参数的降维,加上时域信号的4个特征参数形成最优特征子集.将这些特征子集输入到级联分类器中,经簧载加速度、悬架动行程和车轮加速度三者信号的决策融合,最终输出路面等级的分类结果.与使用单一传感器进行路面等级识别相比,分类结果正确率得到有效提高.
[1] Dupont E M, Moore C A, Collins Jr E G, et al. Frequency response method for terrain classification in autonomous ground vehicles[J]. Autonomous Robots, 2008, 24(4): 337-347.
[2] Howard A, Seraji H. Vision-based terrain characteriza-tion and traversability assessment[J]. Journal of Robotic Systems, 2001, 18(10): 577-587.
[3] Hveem F N. Devices for recording and evaluating pavement roughness[J]. Highway Research Board Bulletin, 1960, 264(1): 1-26.
[4] Yechen Qin, Mingming Dong, Feng Zhao, et al. Road Profile Classification for Vehicle Semi-active Suspension System Based on Adaptive Neuro-Fuzzy Inference System[C].//IEEE Control Decision Conference(CDC). Osaka, Japan. 2015: 1533-1538.
[5] Fukushima Y. Road surface condition detector for automotive vehicle: 美国, 552159[P]. 1996-05-28.
[6] 秦也辰. 基于路面识别的车辆半主动悬架控制研究[D]. 北京: 北京理工大学, 2016.
[7] 杨永锋, 吴亚锋. 经验模态分解在振动分析中的应用[M]. 北京:国防工业出版社,2013
[8] 刘小峰, 秦树人, 柏 林. 基于小波包的经验模态分解法的研究及应用[J]. 中国机械工程, 2007, 18(10): 1201-1204.
[9] 张 璇. 基于小波包和EMD的滚动轴承故障信号分析[D]. 北京:北京化工大学, 2008.
[10] 何正嘉, 訾艳阳, 张西宁. 现代信号处理及工程应用[M].西安:西安交通大学出版社,2007
[11] QinYechen, Zhao Feng, Wang Zhenfeng, et al. Comp-rehensive Analysis for Influence of Controllable Damper Time Delay on Semi-Active Suspension Control Strategies[J]. Journal of Vibration and Acoustics, 2017, 139(3): 031006-1-12.
[12] 常志权, 罗 虹, 褚志刚. 谐波叠加路面输入模型的建立及数字模拟[J]. 重庆大学学报:自然科学版, 2004, 27(12): 5-8.
ResearchonRoadProfileClassificationBasedonMulti-sensorInformationFusion
HU Yi-qian1, ZHAO Feng2
(1. PLA 96271 troops,Luoyang China,471600;2. Beijing Institute of Aerospace Control Devices, Beijing 100854)
U461.4
A
1009-4687(2017)03-0015-05
2017-05-24.
胡益谦(1987-),男,研究方向为车辆工程.
