7.5 kW三电平APFC的研制
2017-10-13张治国
张治国
7.5 kW三电平APFC的研制
张治国
(合肥华耀电子工业有限公司,合肥 230031)
介绍了7.5 kW三电平APFC的研制过程。对三电平APFC进行了建模分析,论述了主要工作原理,对空间矢量控制算法进行了仿真验证。采用电压外环和电流内环双闭环控制,给出了实验过程中PI参数的调节步骤。实验结果验证了理论分析的正确性。
APFC 控制算法 PI调节
0 引言
三相三电平APFC具有输出电压稳定、功率因数高、电流畸变小的优点。区别于二电平APFC,三电平APFC开关器件上的电压应力为直流母线电压的一半,可以使用低压MOS管,成本大大降低;而且,该拓扑开关管之间没有死区时间,开关频率可以很高,从而实现了器件小型化。因此,三相三电平APFC相关技术的开发得到了广泛关注[1~3]。
1 工作原理
图1所示整流器拓扑中,采用两个共源极的MOS管组成双向开关,共用一个驱动信号,不存在开关管直通问题,开关频率可以很高,从而可减小交流侧滤波电感体积。当双向开关导通时,其中一个MOS管处于导通状态,另一个MOS管则处于同步整流状态,因此几乎没有反向恢复电流。
三相三线制三电平APFC开关模型如图2所示。
根据开关状态不同,U=U时,整流器交流侧电压分别会有0,±三种状态,双向开关类似于一个三开关选择器,因此全控开关Sa /Sb /Sc的开关电位状态可表示为:

式中,S=1(表示p,n,o)表示开关S与点连接,否则不连接。整流器交流侧电压不会出现同时为正和同时为负的情形,因此电位组合一共有个,矢量图如图3所示。
图2 三相三电平APFC开关模型
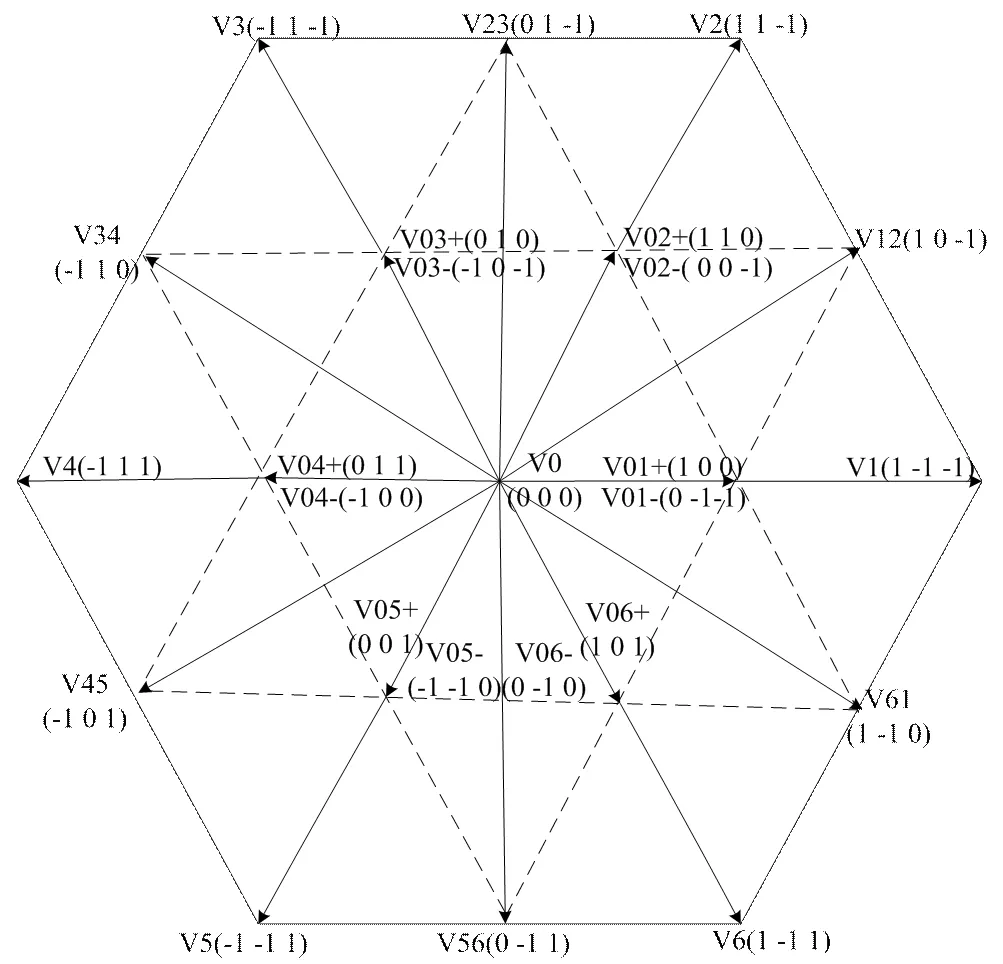
图3 三电平APFC矢量图
25个空间矢量可分为大矢量、中矢量、小矢量和零矢量四种。大矢量为V1、V2、V3、V4、V5、V6;中矢量为V12、V23、V34、V45、V56、V61;小矢量有12个,V01±、V02±、V03±、V04±、V05±、V06±;还有一个零矢量V0。
例如:当S= -1,S= 1,S= 1时,对应的矢量为V4,其电路工作状态如图4所示。
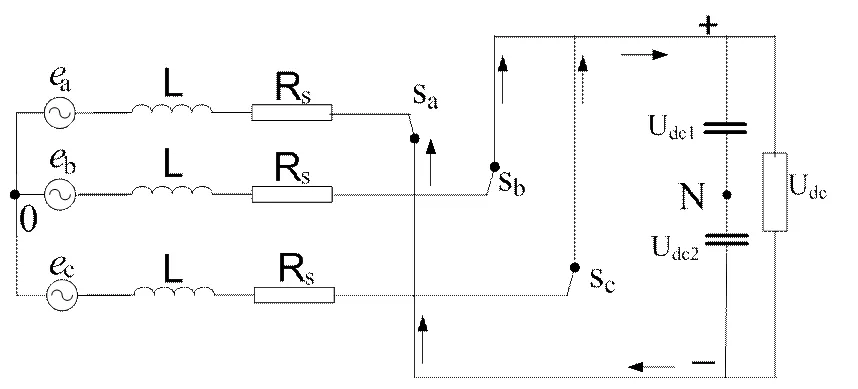
图4 V4矢量的电路工作状态
图4所示电路工作状态下,对应于直流侧输出电容中性点N,整流器交流侧A相输入电压为,B、C相输入电压为。以此为例,可以看出,每一开关状态都对应整流器交流侧电压数值,交流侧电压三种电平状态合成的阶梯波越逼近正弦波,整流效果越好。
2 空间矢量算法的实现
空间矢量调制算法具有易于数字实现、直流利用率高、谐波含量低的优点。该算法在整流器中调制的目标是:通过控制开关导通和关断得到逼近圆形的旋转交流电压矢量,最大程度减少交流电流谐波含量并实现单位功率因数。
韩国学者Jae-Hyeong提出了一种调制方法[4],这种方法把三电平空间分解为6个大扇区,每个大扇区相当于一个二电平PWM整流器的空间矢量,6个大扇区分布区域如下图5所示。
图5给出大扇区Ⅰ~Ⅵ的区间分布。这种方法把三电平转换为二电平计算,避免了大量的三角函数计算过程,得到期望的SVPWM调制输出,大大简化了计算。
三电平矢量简化到二电平矢量后,经过计算最终实现开关管控制,这种算法的运算步骤为:
1)三电平的坐标原点是零矢量,而6个大扇区分别对应的二电平的空间矢量原点是小矢量,首先确定目标矢量落在哪个大扇区,再进行坐标平移;
2)按照二电平计算方法选择最近的三个矢量,确定开关状态;
3)根据幅秒平衡原理计算每个开关管的开通时间。
表1为平移到二电平后七段式调制法相邻空间矢量的作用时间
表1二电平6个相邻区间作用时间分布
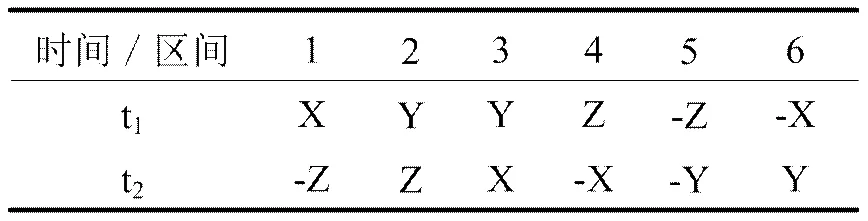
X、Y、Z计算表达式如下:
(2)
式中U表示直流输出电压,T为开关周期,和为坐标平移后的静止二相αβ坐标系变量。
采用Matlab仿真工具,仿真算法采用ode23,仿真步长为1 μs。电路基本参数为:负载电阻R=20 Ω;滤波电感=370 μH;输出侧电容1=2=220 μF;开关频率为30 kHz。
三相电网侧输入相电压有效值为50 V,输出给定直流电压为165 V时基于空间矢量调制方法的仿真结果如图6所示:
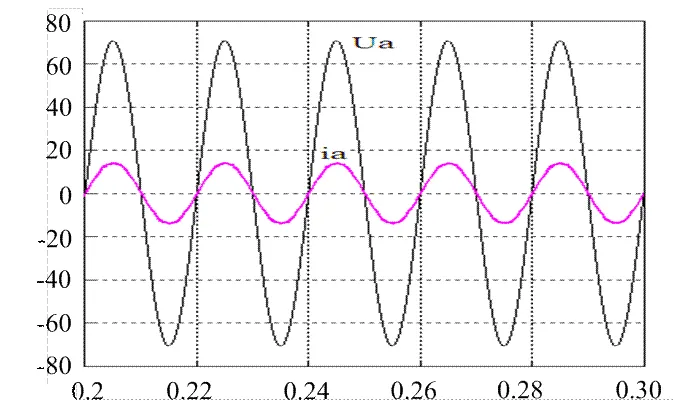
图6 A相交流电压与电流仿真波形
3 PI参数调节步骤
采用电压外环、电流内环的双闭环控制方式,电压外环控制的目的是要得到稳定的直流电压输出,其调节速度小于电流环。基于小信号建模可得到闭环系统的传递函数,进而可初步得到双闭环的PI参数理论值。
PI参数初始理论计算值一般只是作为PI调节的一个起点,实际参数必须在理论计算的基础上反复整定才能得到理想的结果,而且这个整定过程在调试中是必须的。整定过程非常依赖调试人员的经验,文献[5~6]从实验角度给出PI参数在整流器中的修正过程,总结了一些经验,并提到了交流电感和直流侧电容取值对系统性能的影响。
在已有文献的基础上,根据实际调试过程,三电平APFC PI参数修正步骤总结如下:
1)交流侧滤波电感与直流侧输出电容受电源结构限制,往往选择空间不大,选定后一般不做调整。因此,往往在满足基本电气性能指标设计要求后,受电源体积限制其参数应尽可能选择最小值。本实验样机中选择滤波电感为0.37 mH,直流侧电容为470 μF/450V。
2)初始调试阶段,断开电压外环,只调节电流内环。电流内环比例系数Kp取初始理论计算值;积分系数Ki取理论值。分析交流电流和直流侧输出电压波形,若电流波形出现震荡现象,Kp应减小,若电流波形较差(谐波含量高)则逐步增加Kp。同时,观察输出电压,若输出电压偏高,则增加Kp,反之减小。
在调节Kp期间,Ki保持不变。若Kp调节始终得不到理想结果,应调整其限幅,一般先将限幅值设定为理论计算值的1.5倍。
3)电流环调试结束后,其PI参数不变,加上电压环开始双环调试。取电压环Ki为理论值,先调节电压环Kp,若直流输出电压偏高则减少Kp,反之增加。
4)若以上调节均不能达到理想效果,就应该考虑从PWM调制算法编程是否有误和驱动电路硬件设计是否合理这两个方面查找原因了。
4 实验结果
7.5 kW三电平APFC样机输入端接入220 V/50 Hz电网,负载电阻为50 Ω。设定直流参考电压设置为625 V时得到的实验波形如图7所示。
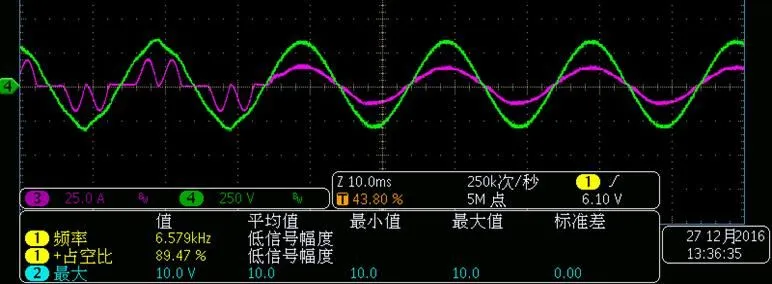
(a) 启动过程中A相电压与电流波形
(b) 稳定后的A相电压与电流波形

(c) 稳定后的A相电流与直流侧输出电压波形
图中给出了A相输入相电压波形(绿色)、直流侧输出电压dc(绿色)与A相交流电流波形(红色)。可以看出启动过程中不控转为可控时,过渡时间短,电流无尖峰。稳定后交流电流正弦度好,输出电压保持稳定,波动较小。而且,稳定后A相相电压与电流同相位,具有单位功率因数。由此可见,采用的控制方法取得了良好的整流效果。
5 结论
空间矢量调制优点是直流电压利用率高,交流电流谐波含量少,易于DSP实现。这种采用三电平转换为二电平进行矢量计算的调制方法占用DSP资源少,计算过程不复杂,适合在工程中应用。
三电平APFC的PI调节一直是设计的难点,但是通过实际工作经验的总结归纳,也可以得到其调节规律。考虑到实际电路与理论设计的差异性,PI参数的最终确定结果与初步计算值往往有较大差异,所以本文给出的PI参数调节步骤具有实际应用价值。
[1] 张豪, 候圣语. SVPWM的VIENNA整流器矢量控制策略的研究[J]. 华北电力大学学报, 2012, 39(5): 54-58.
[2] 张东升, 张东来, 王陶, 等. 三电平整流器的PFC及中点平衡控制方法[J]. 电工技术学报, 2009, 24(10): 81-86.
[3] 刘森森. 电网受干扰时VIENNA整流器同步与控制方法的研究[D]. 浙江大学博士论文, 2012.
[4] Jae Hyeong Seo, A new simplified space-vector PWM method for three-level inverters. [J]. IEEE Trans.Power Electronics, 2001, 16(4): 545-550.
[5] 魏克新, 杜吉飞, 杜明星. 三相PWM整流器电压外环PI调节过程分析[J]. 高电压技术, 2010, 36(9): 2336-2340.
[6] 汪万伟, 尹华杰, 管霖. 双闭环矢量控制的电压型PWM整流器参数整定[J]. 电工技术学报, 2010, 25(2): 67-72.
Development of 7.5 kW Three-level APFC
Zhang Zhiguo
(ECU Electronics Industrial Co., Ltd., Hefei 230031, China )
TM464
A
1003-4862(2017)06-0034-04
2017-019-05
张治国(1977-),男,高级工程师。研究方向:大功率开关电源。zhang1569@126.com
