溢油回收船电力推进系统功率限制功能设计
2017-10-13李进科
黄 磊,李进科,邵 赟
溢油回收船电力推进系统功率限制功能设计
黄 磊,李进科,邵 赟
(武汉武船船舶设计有限公司,武汉 430060)
变频器功率限制功能是保证电力推进系统安全运行不可或缺的一环,本文针对万吨级溢油回收船电力推进系统,设计了一种新的功率限制算法及相应硬件接口,最后通过实船验证,表明该功能设计满足万吨级溢油回收船电力推进系统安全性要求。
电力推进 变频器 功率限制
0 引言
溢油回收船是溢油回收的专用船舶,是溢油污染事故有效控制和快速处置的重要工具。据报道,目前国内最大的溢油回收船是2015年武船为上海打捞局建造交付的大型溢油回收旗舰船“德澋号”,该船排水量4000吨。随着我国石油需求的大幅增长,密集的海上石油运输使得船舶溢油事故的风险日益增加,船舶溢油应急处理能力严重不足,水上溢油应急力量亟待加强,对万吨级溢油回收船的需求已迫在眉睫。
随着溢油回收船吨位不断增加,电站容量也不断增大,对万吨级溢油回收船电力推进系统的安全性也提出了更高的要求。当前电力推进船舶推进系统广泛采用变频驱动,其功率限制功能是保证电力推进系统安全运行不可或缺的一环,因此有必要对其进行详细研究设计[1,2]。
1 系统组成
图1为本船系统单线图,如图所示,共设4台690 V/2600 kW主发电机组,2套3000 kW主推进器,2套1300 kW侧推进器,主侧推进系统均采用变频驱动控制系统,电动机采用变频器驱动,变频器通过移相变压器接入船舶电网,构成虚拟24脉冲整流,可以有效减少系统谐波。另外系统配置1台690 V/400 kW停泊发电机组及1台400 V/150 kW应急发电机组。
主配电板(MSB)内配置有功率管理系统(PMS),用于控制和管理本船的电网。PMS根据功率的需求对每台主发电机及推进控制系统进行监控并协调各发电机的工作,可以对供电系统进行故障报警和处理,为推进系统和其他用电设备提供可靠、稳定及优化配置的电力能源。在供电系统出现故障时,PMS会采取各种措施,尽可能保证对负载的连续供电,避免电站断电,确保船舶的安全性。PMS还可监测停泊发电机的状态和报警。
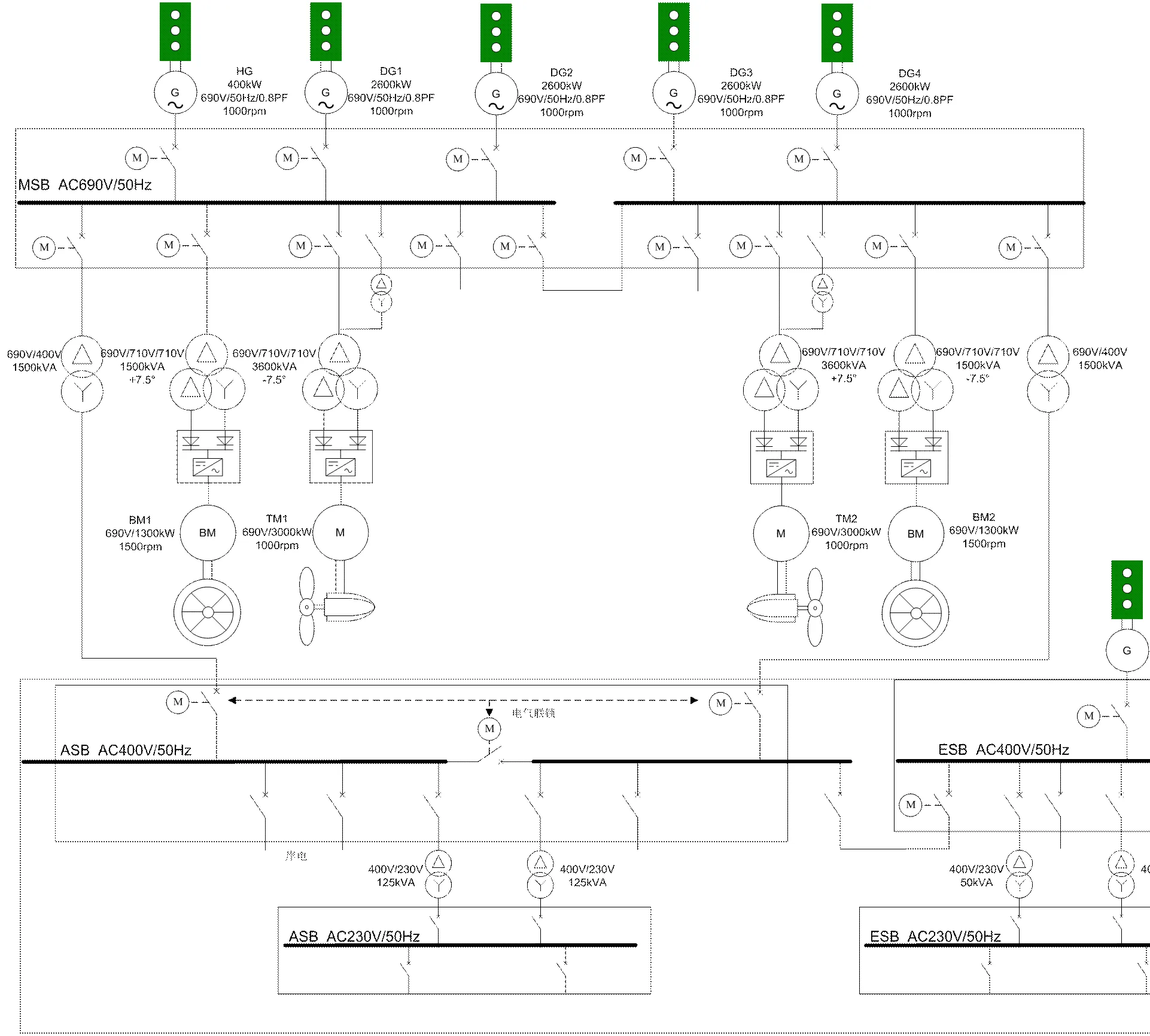
图1 电力推进系统单线图
2 功率限制功能概述
电力推进船舶的主要负荷为推进功率消耗,其一般可以占到全船机组容量的70%以上,对于如此巨大的负荷,推进系统变频器具备功率限制功能是必要的,这样可以实现对机组的过载保护[3]。
变频器功率限制功能包括动态功率限制和快速功率限制。动态功率限制是指当机组可用功率不足(负荷率过高)时,推进系统能够动态限制推进功率,防止机组过载停机等严重故障产生。快速功率限制是指当在网机组处于高负荷,某台机组突然故障停机或主开关突然分闸等外部严重故障时,推进系统能够快速限制推进功率,防止剩余在网机组过载停机,避免全船失电的发生。
3 功率限制功能设计
3.1 硬件接口设计
为了实现功率限制功能,变频器需要知道外部电力推进系统相关状态,硬件接口如图2所示。
变频器功率限制功能实现的主体为变频器和功率管理系统(PMS),其接口主要包括功率管理系统发送给变频器的各机组负荷率(4~20 mA模拟量)和在网状态(开关量),另外还有变频器发送给操控系统的功率限制状态(开关量)。
变频器控制单元通过采集所有机组负荷率及在网状态,根据变频器功率单元当前的功率输出值计算出功率限幅值发送到变频器功率单元,实时调整变频器输出功率,同时发送功率限制状态到推进操控系统,以实现进一步的系统保护。

图2 变频器功率限制功能接口
3.2 软件程序设计
3.2.1 动态功率限制
动态功率限制是指当船舶电力推进系统正常运行时,变频器实时监测机组负荷率,当监测到某台机组负荷率过高(例如95%)时,即时限制变频器输出功率,保证机组安全运行,具体流程图如图3所示。

图3 动态功率限制软件流程图
如上图所示(前提为所有机组之间有功分配良好,平衡度满足船规要求),变频器不间断采集所有在网机组负荷率并进行判断,当机组最大负荷率达到95%时,开始进行动态功率限制流程,逐渐降低变频器输出功率,同时机组最大负荷率也会随之降低。直到机组最大负荷率下降到85%,变频器功率限制释放,然后继续循环上述流程。
功率限制值采用斜坡函数处理,所有功率限制生效的环节,功率限制值垂直下降,所有功率限制释放的环节,功率限制值按固定斜率上升。
3.2.2 快速功率限制
快速功率限制主要用于当外部系统导致的严重故障,例如某机组故障停机、母联开关分断等,变频器可以快速降低变频器输出功率,以保证剩余在网机组安全运行,防止全船失电等更严重事故发生,具体流程图如图4所示。

图4 快速功率限制软件流程图
如上图所示,变频器不间断采集所有机组在网状态及在网机组负荷率并进行判断,当负荷率大于50%的机组数量发生跳变时,根据严重程度分为三级快速降负荷,即在当前变频器输出功率的基础上按不同系数进行快速功率限制。一级快速降负荷系数最小,三级快速降负荷系数最大,在兼顾机组安全的前提下,最大限度减少因快速降负荷而导致的推进功率跌落,具体系数需要按实际情况进行整定[4]。
功率限制值采用斜坡函数发生器处理,快速功率限制生效的环节,功率限制值垂直下降。快速功率限制生效后延时5 s转动态功率限制程序。
3.2.3 功率限制状态判断
功率限制状态判断的主要依据是比较变频器实际输出功率和功率限制值,当变频器实际输出功率大于或等于功率限制值时,认为处于功率限制状态,置该位(硬线或通讯)为1,同时操控面板上“功率限制”状态灯亮起。具体流程图如图5所示。
4 理论分析及实船验证

图5 功率限制状态判断软件流程图
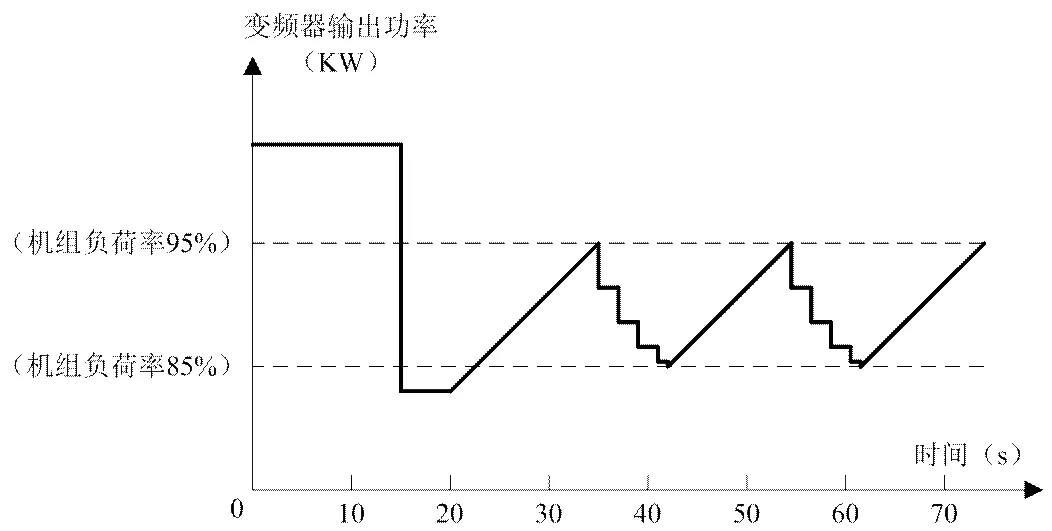
图6 功率限制期间变频器输出功率曲线
图6所示为理论上功率限制时变频器输出功率随时间变化的曲线。如图所示,0~15 s时变频器恒定功率输出,第15 s时,机组主开关发生跳闸,变频器进行快速降负荷,降低到某一较低水平。5 s后,转为动态功率限制,变频器输出功率按一定斜率上升,同时机组最大负荷率同步上升,当机组最大负荷率达到95%时,变频器按一定周期逐步减小输出功率,直到机组最大负荷率降低到85%,然后变频器输出功率按一定斜率上升。
上图所示仅为本功率限制功能的过程分析,其动态功率限制对机组的负荷影响还是较大,存在不稳定因素。动态功率限制过程依赖于变频器控制单元本身的计算性能,其计算性能越强,循环周期越快,动态功率限制过程可以越精细,可以实现5%以内的机组负荷率波动(忽略其他船用负荷影响),大大减小对机组的负荷影响[5]。
5 总结
通过对变频器功率限制功能软硬件详细设计分析及实际验证,表明变频器功率限制功能成功实现,效果良好,为万吨级溢油回收船的安全可靠运行提供了保证。
[1] 王兆安, 黄俊. 电力电子技术(第四版). 北京: 机械工业出版社, 2000.
[2] 邓星钟主编. 机电传动控制(第三版). 武汉: 华中科技大学出版社, 2001.
[3] 海定广, 孙兴旺编. 电气拖动基础(第二版). 北京:机械工业出版社, 1998.
[4] 陈伯时主编. 电力拖动自动控制系统(第二版). 北京: 机械工业出版社, 1992.
[5] 李华德, 杨永立. 异步电动机矢量控制系统. 变频器世界, 2007.
Design of Power Limit Function of Electric Propulsion System for Oil-spill Recovery Ship
Huang Lei, Li JinKe, Shao Yun
(Wuhan Shipbuilding Design Co., Ltd., Wuhan 430060, China)
U664.91
A
1003-4862(2017)06-0016-04
2017-03-13
黄磊(1974-),男,研究员级高级工程师。研究方向:电磁测量技术及仪表。E-mail: 591346513@qq.com
