MEMS陀螺阵列技术研究进展
2017-10-11刘洁瑜汪立新
沈 强,刘洁瑜,汪立新,王 琪
(火箭军工程大学控制工程系,西安710025)
MEMS陀螺阵列技术研究进展
沈 强,刘洁瑜,汪立新,王 琪
(火箭军工程大学控制工程系,西安710025)
MEMS陀螺仪体积小、功耗低的优点扩展了惯性器件的应用领域,对于制导武器的小型化具有重要的意义。但国内MEMS陀螺仪精度相对偏低、噪声大,这限制了它在高精度军事领域的应用。陀螺阵列可以利用冗余信息有效提高MEMS陀螺的精度,实现低精度陀螺的高精度应用,而不需要技术和工艺的突破。介绍了MEMS陀螺阵列的基本原理,总结了陀螺阵列近年来的研究进展。在此基础上,提出了陀螺阵列的4大关键技术:陀螺冗余系统配置,误差分析、建模与标定,故障诊断以及信息融合。最后,分析了陀螺阵列的发展特点以及研究重点,给出了MEMS陀螺阵列技术未来的发展思路。
MEMS陀螺仪;陀螺阵列;信息融合;故障诊断
Abstract:MEMS gyroscopes have extended the field of inertial sensors application thanks to their attractive advanta⁃ges such as small size and low power consumption,which is significant for miniaturization of the guided weapon.However,in our country,the low accuracy and large noise of the MEMS gyroscope limit the applications to military tasks requiring high⁃precision rate signals.The accuracy of the MEMS gyroscope can be effectively improved through gyro array technique with redundant information,which means that the MEMS gyroscope with low accuracy can be applied in high precision filed in the absence of technological breakthrough.In this paper,the basic theory of the MEMS gyro array technique is intro⁃duced,and the research progress in this filed in recent years is summarized.On that basis,the key technologies are pro⁃posed,which includes redundant configuration of the gyro array,error analysis,modeling and calibration,fault diagnosis and information fusion.Finally,the developmental characteristics and research emphasis is analyzed,and the develop strat⁃egy and trend of the MEMS gyro array is proposed.
Key words:MEMS gyroscope;gyro array;information fusion;fault diagnosis
0 引言
MEMS陀螺仪体积小、质量轻、易于批量生产,芯片化的集成在降低功耗的同时提高了其可靠性,使其更便于实现数字化和智能化。因此,MEMS陀螺仪应用前景十分广阔,在航空航天、汽车、电子设备以及武器制导等军民领域都受到普遍的重视。MEMS技术近年来发展迅速,但目前结构设计、工艺水平和检测电路方面还需进一步提高。MEMS陀螺仪在性能上与传统陀螺仪还存在很大差距,特别是国内实现的MEMS陀螺仪精度普遍偏低,难以满足现代战争中高精度的军事应用需求[1⁃2]。因而,如何在充分发挥MEMS陀螺优势的前提下提高其精度一直是研究的重要方向[3⁃4]。
基于目前的工艺和技术水平,迅速提高单个MEMS陀螺的精度难度较大。而MEMS概念的首议者、美国著名物理学家Feynman曾经指出,如何用低精度惯性器件制造出高精度的产品是MEMS相关技术发展的重要课题。在这种思路的引导下,通过多个陀螺信号进行融合来提高性能的方法越来越受到重视。这项技术是2003年提出的[5],而后得到了迅速发展,这得益于MEMS陀螺的出现和市场化。在不同的文献中,这项技术有不同的名称,如陀螺阵列(Gyro Array)、虚拟陀螺(Virtual Gyro)、 冗余陀螺(Redundant Gyro)、批量MEMS陀螺(Multiple MEMS Gyros)等,其原理都是一致的,均可称为陀螺阵列技术。
1 基本原理
陀螺阵列技术指的是采用多个MEMS陀螺构成阵列,测量同一角速率信号,在对各陀螺的信号分析和建模的基础上进行数据融合,从而提高陀螺仪精度的手段。图1为通常采用的陀螺阵列方案。
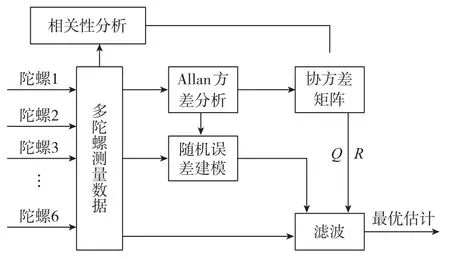
图1 陀螺阵列方案图Fig.1 Structure of gyro array technique
首先利用Allan方差等手段分析陀螺仪的误差构成,建立合理的陀螺仪输出模型。然后设计软件滤波器对阵列中的N个陀螺输出的误差进行最优估计,并补偿校正测量信息,从而得到输入角速率的高精度估计值。
可以引电阻并联来说明陀螺阵列提高MEMS陀螺精度的基本原理,将N个电阻为R的电阻并联,输出电阻为R/N。以此推论,通过探寻陀螺间的相关性,利用信息融合的手段,实现其相互间的补偿,希望输出噪声近似或优于单个陀螺噪声的。
2 MEMS陀螺阵列研究现状
2.1 国外发展现状
陀螺阵列技术最早是由美国JPL实验室的Bayard等提出,并被称之为“虚拟陀螺”。2003年,他们将4个漂移为8.66(°)/h的陀螺连续运行111h,然后采用经典Kalman滤波对输出信号进行融合。当4个陀螺完全不相关时,融合后的陀螺漂移为4.93(°)/h,精度提高约2倍;当4个陀螺信号相关性较好,相关系数ρ=-0.333时,融合后的漂移降到0.062(°)/h,性能提高了173倍。他们仅仅做了仿真分析,并没有做实物试验[5⁃6]。而后,美国Swales Aerospace公司的Lam在对MEMS陀螺随机噪声进行动态建模的基础上,引入外部校正信息,然后通过信息融合算法来改善MEMS传感器的性能,其方法与JPL实验室的虚拟陀螺技术类似[7]。为有效解决多个MEMS陀螺非线性融合的维数灾难问题,2008年,Nevada大学的Stubberud提出了一种新的扩展Kalman滤波(EKF)算法,充分利用了每个敏感器的动态信息,显著提高了融合精度[8]。
此后,多种新的融合算法被应用到陀螺阵列上,且阵列规模也逐渐变大。2008年以来,美国Tanenhaus and Associates公司致力于研发基于多MEMS陀螺以及加速度计的低成本高精度惯性导航系统,以满足智能弹药、小型导弹、小型无人机等武器的需求。该公司陆续发布了多款产品,比较有代表性的是由24个MEMS陀螺和6个加速度计构成的三轴IMU,通过小波去噪、信息融合以及其他的辅助校正手段,该产品的5h角度漂移可优于 0.03°[9⁃11]。
2009年,Al⁃Majed等利用陀螺阵列噪声的相关性,设计了一种组合滤波方案来提高角速率的估计精度,但并未给出具体的仿真和实验结果[12]。2015年,美国Michigan大学的Wang等在三层开发板上集成了72个MEMS陀螺,如图2所示。他们采用隐Markov模型对陀螺阵列进行建模和融合,并探索了陀螺间的相关性。实验表明,陀螺精度得到了显著提高,且与Kalman滤波相比提高了50%。同时,可以从他们的实验结果中发现:当阵列陀螺达到一定数量后,进一步增加其数量对精度提高的意义并不大[13]。
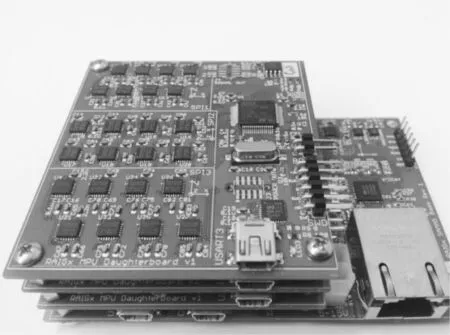
图2 72个陀螺构成的陀螺阵列Fig.2 Gyro array with 72 MEMS gyroscopes
2016年,印度PES理工学院的Heera等设计了3×3平面结构的陀螺阵列,并通过递推Kalman滤波实现了最小方差估计[14]。瑞典皇家理工学院的Skog等设计了4×4×2平面结构的IMU阵列,提出了一种最大似然估计算法用于MIMU阵列的融合;提出迭代解法用于低维优化问题;推导出量测融合问题的Cramér⁃Rao边界,分析了阵列的几何结构和传感器误差对融合精度的影响,其分析结果对陀螺阵列的下一步研究具有重要的指导意义[15]。
2017年,美国罗德岛大学的Vaccaro等提出了一种阵列陀螺漂移互相关性的估计方法(Allan Covar⁃iance),在此基础上,采用最优线性组合方法对阵列进行融合。试验中使用28个陀螺构成阵列,融合后漂移的功率谱密度是原来的1/40[16]。
2.2 国内发展现状
国内最先对MEMS陀螺阵列技术进行研究的是西北工业大学。2006年,胡敏在其硕士论文中首次提到了 “虚拟陀螺”的概念,设计了基于Kalman滤波器的最优估计器,并结合3个陀螺的零漂数据进行了试验[17]。此后,张鹏[18⁃19]、 薛亮[20⁃23]、常洪龙[24⁃25]等对陀螺阵列进行了一系列深入的研究,取得了很多重要的成果,包括软件滤波器的设计、陀螺阵列的配置、试验系统的建立以及融合精度与陀螺数量、陀螺相关性、陀螺带宽等因素的关系。采用的方法主要是Kalman滤波及其相关算法,陀螺阵列的结构包括3×1和2×3平面排列方式。摇摆试验中,通过调整参数设置,陀螺误差标准差可降低至原来的1/4左右。
哈尔滨工业大学自2012年以来也对MEMS陀螺阵列做了较多的研究。尹作刚在其硕士论文中设计了虚拟动态滤波器,提高了脱落的敏感值,并研究了虚拟陀螺技术在惯性稳定平台中的应用[26];庞博和成雨在其硕士论文中完成了批量MEMS陀螺的总体方案设计,采用2组2×4排列的陀螺配置方法,如图3所示,并在此基础上引入了多级序贯式的估计融合方法,提出了基于离散小波变换的故障检测和隔离算法,并制作了工程样机,完成了试验验证[27⁃28]。姜宇等针对 MEMS陀螺噪声的非线性特性,采用希尔伯特⁃黄变换(Hilbert Huang Transform,HHT)对MEMS陀螺信号进行分解,基于非线性相关系数(NCC)对其进行滤波处理,并利用非线性相关信息熵(NCIE)对信号进行融合,4个陀螺融合后方差降低50%,且能保证融合过程中不丢失重要信息[29]。在之后的工作中,他们针对MEMS陀螺信号的异方差性特点,结合温度特性分析,建立了单个MEMS陀螺漂移的广义自回归异方差模型,在此基础上进行了多元相关性分析和信号的加权融合,仿真结果显示其效果优于同方差分析方法[30]。
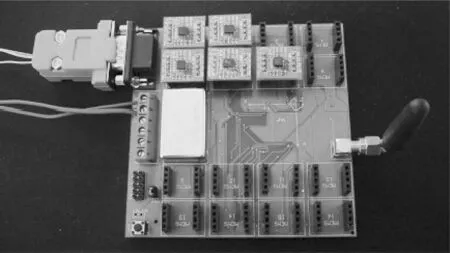
图3 哈尔滨工业大学16陀螺配置方案Fig.3 Redundant configuration with 16 gyroscopes of Harbin Engineering University
哈尔滨工程大学的何昆鹏等研究了虚拟陀螺技术在MEMS惯性导航系统中的应用,3个陀螺构成的阵列精度最大提高了2.7倍[31];梁海波在其博士论文中对基于陀螺冗余的微惯性系统关键技术进行了研究,包括冗余陀螺配置方式、在线故障诊断、实验室标定与在线标定方法等,提出了新型9陀螺冗余配置方案(分3组,1组沿坐标轴正装,2组斜装,每组的3个陀螺正交),处理后误差标准差降低至原来的1/2左右[32],如图4所示。

图4 新型9陀螺冗余配置方案Fig.4 New redundant configuration with 9 gyroscopes
此外,东南大学[33⁃34]、北京航空航天大学[35]、西安理工大学[36⁃37]、华中科技大学[38]也对MEMS陀螺阵列进行了一些研究。主要是针对数据融合算法,每个轴上安装3个或4个陀螺,利用支持度、多尺度小波分解等方法实现陀螺输出的融合,将陀螺精度提高了2倍以上。
近几年,我们针对MEMS陀螺阵列技术也做了一些相关的研究[39⁃42],设计了6陀螺阵列试验系统,如图5所示。建立了适用于不同情况的陀螺误差模型,分析了陀螺间的动态条件相关性以及陀螺数量、相关性等因素与融合效果的关系。并针对不同条件,提出了相应的融合算法,可以将陀螺的精度有效提高5倍左右,特别是基于动态条件相关的加权融合算法具有较强的容错能力,可以自动检测和隔离故障陀螺。

图5 由6个陀螺构成的陀螺阵列Fig.5 Prototype of the gyroscope array with 6 gyrocopes
3 关键技术
根据陀螺基本原理以及上述国内外对陀螺阵列技术的研究,总结出其关键技术主要包括以下几个方面:
(1)陀螺冗余系统配置
冗余陀螺的配置主要包括陀螺的数量和配置方案,需要综合考虑陀螺的体积、成本、精度和系统的可靠性。从单轴的角度来看,通常采用的配置方案以简单的平面排布为主。随着MEMS技术的发展,国内外研究者为适应高精度高可靠性导航的需求,提出了更多的陀螺冗余配置方案,如正四面体、正六面体、正八面体、正十二面体以及正二十面体。
(2)误差分析、建模与标定
对单个陀螺进行准确的误差分析和建模是陀螺融合的基础,目前应用较多的包括Allan方差分析法、ARMA建模、神经网络和小波分析等方法。根据基本原理可知,陀螺阵列的一个重要基础就是获得阵列陀螺间的相关性。因此,如何得到阵列陀螺间的相关系数是误差分析的重点。另外,对每个陀螺的误差系数的精确标定会在很大程度上影响陀螺阵列的输出,特别是在冗余配置方案相对复杂的情况下。
(3)故障诊断
陀螺阵列中至少采用3个以上的敏感器,敏感器会不可避免地产生故障。一旦产生故障,量测数据变得十分不可靠,进而影响到系统整体的工作。因此,为了保证系统的可靠性,需要设计多传感器故障诊断算法以快速准确地检测和隔离敏感器所发生的故障。近年来,有关陀螺系统的故障检测和隔离(Fault Detection and Isolation,FDI)算法主要有直接诊断法、设计故障观测器的FDI算法、利用冗余信息的FDI算法以及采用先进理论的新型FDI算法,如小波理论、模糊逻辑、机器学习等。
(4)信息融合
信息融合技术是陀螺阵列的核心,融合方法的性能对陀螺阵列的提高起决定性作用。所以,大部分文献的主要工作都集中在融合算法的研究上。信息融合技术是产生于20世纪70年代的一门新兴边缘性学科,并逐渐发展成为与多学科密切相关的前沿技术领域。目前,常用的方法包括Kalman滤波及其相关算法、Bayes估计、D⁃S证据理论、模糊逻辑等。
4 总结与展望
目前,国内外对陀螺阵列的研究主要有以下几个特点:
1)主要集中在误差建模和融合算法的研究上,对陀螺阵列的配置研究相对较少;
2)对陀螺间相关性的作用有一定的研究,但没有充分发挥出来,所以试验结果往往比仿真差很多;
3)多采用将多个陀螺模块构成阵列的方式,采用某种连接方式将多个角速度敏感单元进行集成,再用统一的信号处理电路处理的相对较少。
综上所述,以下几个方面值得我们进一步研究:
1)陀螺的数量、方向、排列方式等可以在很大程度上影响阵列的性能,可以开展更加深入的研究,同时结合陀螺仪各项误差的成因、机理,探索MEMS陀螺的误差自校正技术;
2)融合算法是决定陀螺阵列的主要因素,研究复杂度低,融合精度高,且具有容错功能的融合算法依然非常重要;
3)研究阵列中各陀螺间的相关性,特别是对时变相关系数的动态描述,以充分发掘阵列技术的潜力;
4)进行陀螺阵列的高动态试验,研究其在复杂动态环境下的性能变化,一方面可以考察其实用性,另一方面可以发掘其改善惯导动态性能的潜力。
上述研究主要从使用方的角度出发,由于受自身实验室条件的限制,研究的重点主要是在误差分析、建模、融合算法上。而对于生产方,可以从陀螺结构、陀螺配置、电路优化等角度出发,提高陀螺间的相关性,实现陀螺误差自校正等,对陀螺性能的提高可能会有更大的作用。
另外,在单个陀螺芯片上集成多个质量块来构成陀螺阵列(有的文献中称之为阵列陀螺,与利用单独的MEMS陀螺构成陀螺阵列的方式相区分)是国内外研究的一个重要趋势[43⁃48]。这种方式有利于提高陀螺间的相关系数,集成度更高,可以通过设计不同的结构来提高陀螺的各项性能指标。特别是对于生产方,此项研究具有重要的意义。
5 结论
过去的30年,商业应用的高速拓展以及军事装备对高性能、低功耗的惯性器件与高集成度系统的需求,促进MEMS惯性器件迅猛发展。但国内技术和工艺的限制制约了MEMS陀螺精度的提高,主要产品还是以中低精度为主,而陀螺阵列技术却为低精度陀螺的高精度应用提供了一种很好的方式。本文基于近年的研究与实践,就MEMS陀螺阵列技术的研究进展和关键技术展开了讨论,并对未来发展趋势进行了评述,提出了我们的研究建议。
[1]Kim D,M'Closkey R T.Spectral analysis of vibratory gyro noise[J].IEEE Sensors Journal,2013,13(11):4361⁃4374.
[2]Yang B,Wang S R,Li H S,et al.The coupling error a⁃nalysis of the decoupled silicon micro⁃gyroscope[C].Pro⁃ceedings of the 5thIEEE International Conference on Nano/Micro Engineered and Molecular Systems,2010:356⁃361.
[3]张新喜,张嵘,郭美凤,等.足绑式行人导航偏航角误差自观测算法[J].中国惯性技术学报,2015,23(4):457⁃466.ZHANG Xin⁃xi,ZHANG Rong,GUO Mei⁃feng,et al.Yaw error self⁃observation algorithm for pedestrian navigation via foot⁃mounted inertial navigation system[J].Journal of Chinese Inertial Technology,2015,23(4):457⁃466.
[4]Tatar E,Alper S E,Akin T.Quadrature⁃error compensation and corresponding effects on the performance of fully decou⁃pled MEMS gyroscope[J].Journal of Microelectromechanical System,2012,21(3):656⁃667.
[5]Bayard D S,Ploen S R.High accuracy inertial sensors from inexpensive components[P].US Patent:6882964,2005⁃04⁃19.
[6]Bayard D S.Combining multiple gyroscope outputs for in⁃creased accuracy[R].Pasadena:NASA's Jet Propulsion Laboratory,2003.
[7]Lam Q M,Wilson Jr T,Contillo R,et al.EnhancingMEMS sensors accuracy via random noise characterization and calibration[C].Proceedings of SPIE,Bellingham,WA,2004,540:427⁃438.
[8]Stubberud P A,Stubberud A R.A signal processing tech⁃nique for improving the accuracy of MEMS inertial sensors[C].Proceedings of the 19thInternational Conference on Systems Engineering,2008:13⁃18.
[9]Tanenhaus M,Carhoun D,Holland A.Precision navigation for UAVs,mini⁃munitions and handhelds through application of low cost accurate MEMS IMU/INS technology[C].Pro⁃ceedings of IEEE/ION Position,Location and Navigation Symposium,2008:244⁃252.
[10]Tanenhaus M,Geis T,Carhoun D,et al.Accurate real time inertial navigation device by application and pro⁃cessing ofarrays ofMEMS inertialsensors[C].Proceedings of IEEE/ION Position,Location and Naviga⁃tion Symposium,2010:20⁃26.
[11]Tanenhaus M,Carhoun D,Geis T,et al.Miniature IMU/INS with optimally fused low drift MEMS gyro and accel⁃erometers for applications in GPS⁃denied environments[C].Proceedings of IEEE/ION Position,Location and Navigation Symposium,2012:259⁃264.
[12]Al⁃Majed M I,Alsuwaidan B N.A new testing platform for attitude determination and control subsystems:design and applications[C].IEEE/ASME International Conference on Advanced Intelligent,Mechatronics,Singapore,2009:1318⁃1323.
[13]Wang J,Olson E.High⁃performance inertial measurements using a redundant array of inexpensive gyroscopes(RAIG)[C].2015 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems(MFI),San Diego,CA,USA,2015:71⁃76.
[14]Heera M M,Divya J K,Varma M S,et al.Minimum va⁃riance optimal filter design for a 3×3 MEMS gyroscope cluster configuration[J].IFAC Papers on Line,2016,49(1):639⁃645.
[15]Skog I,Nilsson J O,Handel P,et al.Inertial sensor ar⁃rays,maximum likelihood,and Cramér⁃Rao bound[J].IEEE Transactions on Signal Processing,2016,64(16):4218⁃4227.
[16]Vaccaro R J,Zaki A S.Reduced⁃drift virtual gyro from an array of low⁃cost gyros[J].Sensors,2017,17(2):352.
[17]胡敏.基于阵列技术的 MEMS虚拟陀螺技术研究[D].西北工业大学,2006.HU Min.Research on MEMS virtual gyroscope technology based on array technology[D].Northwestern Polytechnical University,2006.
[18]张鹏,常洪龙,苑伟政,等.虚拟陀螺技术研究[J].传感技术学报,2016,19(5):2226⁃2229.ZHANG Peng,CHANG Hong⁃long,YUAN Wei⁃zheng,et al.On improving the accuracy of micromachined gyroscopes based on multi⁃sensors fusion[J].Chinese Journal of Sensors and Actuators,2016,19(5):2226⁃2229.
[19]张鹏.微机械陀螺的高精度 “虚拟”实现方法研究[D].西北工业大学,2007.ZHANG Peng.Research on high precision virtual realiza⁃tion of micro machined gyroscope[D].Northwestern Poly⁃technical University,2007.
[20]Xue L,Jiang C Y,Chang H L,et al.A novel Kalman fil⁃ter for combining outputs of MEMS gyroscope array[J].Measurement,2012,45(4):745⁃754.
[21]Jiang C Y,Xue L,Chang H L,et al.Signal processing of MEMS gyroscope arrays to improve accuracy using a 1st order Markov for rate signal modeling[J].Sensors,2012,12(2):1720⁃1737.
[22]Xue L,Wang L X,Xiong T,et al.Analysis of dynamic performance of a Kalman filter for combining multiple MEMS gyroscopes[J].Micromachines,2014,5(4):1034⁃1050.
[23]Xue L,Jiang C Y,Wang L X,et al.Noise reduction of MEMS gyroscope based on direct modeling for an angular rate signal[J].Micromachines,2015,6(2):266⁃280.
[24]Chang H L,Xue L,Qin W,et al.An integrated MEMS gyroscope array with higher accuracy output[J].Sensors,2008,8(4):2886⁃2899.
[25]Chang H L,Xue L,J Jiang C Y,et al.Combining nu⁃merous uncorrelated MEMS gyroscopes for accuracy im⁃provement based on an optimal Kalman filter[J].IEEE Transactions on Instrumentation and Measurement,2012,61(11):3084⁃3093.
[26]尹作刚.基于虚拟微陀螺技术的惯性稳定平台的研究[D].哈尔滨工业大学,2012.YIN Zuo⁃gang.Research of inertially stabilized platforms based on virtual MEMS gyro technology[D].Harbin Insti⁃tute of Technology,2012.
[27]庞博.批量MEMS陀螺信息融合技术研究[D].哈尔滨工业大学,2013.PANG Bo.Research on information fusion method of mul⁃tiple MEMS gyroscopes[D].Harbin Institute of Technolo⁃gy,2013.
[28]成雨.批量MEMS陀螺的设计与实现[D].哈尔滨工业大学,2014.CHENG Yu.The design and realization of multiple MEMS gyroscopes[D].Harbin Institute of Technology,2014.
[29]姜宇,金晶,张迎春.基于异方差分析的多MEMS陀螺随机误差补偿方法[J].宇航学报,2012,33(6):776⁃780.JIANG Yu,JIN Jing,ZHANG Ying⁃chun.Compensation method for random error signals of multiple MEMS gyro⁃scopes based on heteroscedasticity analysis[J].Journal of Astronautics,2012,33(6):776⁃780.
[30]姜宇,金晶,张迎春,等.基于HHT的多MEMS陀螺信号融合算法研究[J].控制与决策,2012,27(5):646⁃651.JIANG Yu,JIN Jing,ZHANG Ying⁃chun,et al.Fusion algorithm of multi⁃MEMS gyroscope based on HHT[J].Control and Decision,2012,27(5):646⁃651.
[31]何昆鹏,程万娟,高延滨,等 .虚拟陀螺技术在MEMS惯性导航系统中的应用[J].哈尔滨工程大学学报,2009,30(10):1123⁃1128.HE Kun⁃peng,CHENG Wan⁃juan,GAO Yan⁃bin,et al.Virtual gyro technique applied in the MEMS inertial navigation system[J].Journal of Harbin Engineering Uni⁃versity,2009,30(10):1123⁃1128.
[32]梁海波.基于陀螺冗余的微惯性系统关键技术研究[D].哈尔滨工程大学,2011.LIANG Hai⁃bo.Key technique of micro inertial system based on redundant gyroscopes[D].Harbin Engineering University,2011.
[33]吉训生,王寿荣.硅微陀螺阵列信号处理技术研究[J].宇航学报,2009,30(1):235⁃239.JI Xun⁃sheng,WANG Shou⁃rong.Research on signal pro⁃cession of Silicon micro⁃gyroscope array[J].Journal of Astronautics,2009,30(1):235⁃239.
[34]Ji X S.Research on signal processing of MEMS gyro array[J].Mathematical Problems in Engineering,2015(3):1⁃6
[35]张华强,赵剡,陈雨.用于支持度的MEMS陀螺信息融合方法[J].宇航计测技术,2012,32(2):18⁃21.ZHANG Hua⁃qiang,ZHAO Yan,CHEN Yu.Information fusion of MEMS⁃gyro based on support degree[J].Journal of Astronautic Metrology and Measurement,2012,32(2):18⁃21.
[36]任亚飞,柯熙政.多尺度小波分解融合在微机电陀螺数据处理中的应用[J].应用科学学报,2010,28(4):394⁃398.REN Ya⁃fei,KE Xi⁃zheng.Fusion of multi⁃scale wavelet decomposition and application to MEMS gyroscope data processing[J].Journal of Applied Sciences,2010,28(4):394⁃398.
[37]任亚飞,柯熙政.微机电陀螺数据融合中小波基的选择[J].信息与控制,2010,39(5):646⁃656.REN Ya⁃fei,KE Xi⁃zheng.Wavelet base selection for data fusion of micro electro mechanical system[J].Infor⁃mation and Control,2010,39(5):646⁃656.
[38]Zhang L,Liu C J,Yu S,et al.Design and analysis of a novel virtual gyroscope with muti⁃gyroscope and acceler⁃ometer array[J].Review of Scientific Instruments,2016,87(8):1593⁃1608.
[39]Liu J Y,Shen Q,Qin W W.Signal processing technique for combining numerous MEMS gyroscopes based on dy⁃namic conditional correlation[J].Micromachines,2015,6(6):684⁃698.
[40]Shen Q,Liu J,Qin W,et al.Combining numerous gyro⁃scopes for accuracy improvement using autoregressive process for rate signal modeling[C].Proceedings of 2016 IEEE Chinese Guidance,Navigation and Control Confer⁃ence,2016:826⁃831.
[41]刘洁瑜,沈强,李灿,等.基于优化KF的MEMS陀螺阵列信号融合方法[J].系统工程与电子技术,2016,38(12):2705⁃2710.LIU jie⁃yu,SHEN Qiang,LI can,et al.Fusion method of MEMS gyro array signals based on optimal KF[J].System Engineering and Electronics,2016,38(12):2705⁃2710.
[42]沈强,刘洁瑜,王琪,等.用于MEMS陀螺阵列信号处理的OBE平滑算法[J].中国惯性技术学报,2017,25(1):109⁃114.SHEN Qiang,LIU Jie⁃yu,WANG Qi,etal.OBE smoother for signal processing of MEMS gyroscope array[J].Journal of Chinese Inertial Technology,2017,25(1):109⁃114.
[43]Kim S,Chun K.A gyroscope array with capacitive detec⁃tion[J].Journal of the Korean Physical Society,2002,40(4):595⁃600.
[44]Kim S,Lee B,Lee J,et al.A gyroscope array with linked⁃beam structure[C].IEEE International Conference on Micro Electro Mechanical Systems,2001:30⁃33.
[45]Zhang Y Q,Ji X S,Yang B,et al.A novel Silicon micro⁃gyroscope array[J].Chinese Journal of Sensors and Actu⁃ators,2013,26(4):471⁃475.
[46]张印强,杨波,李婧,等.硅微阵列陀螺仪的仿真、设计与测试[J].传感技术学报,2012,25(1):29⁃32.ZHANG Yin⁃qiang,YANG Bo,LI Jing,et al.Simulation,design and test of Silicon micro⁃gyroscope array[J].Chinese Journal of Sensors and Actuators,2012,25(1):29⁃32.
[47]张印强,吉训生,王寿荣.硅微阵列陀螺仪的信号滤波技术[J].东南大学学报(自然科学版),2013,43(6):1222⁃1226.ZHANG Yin⁃qiang,JIXun⁃sheng,WANG Shou⁃rong.Signal filtering method of Silicon micro⁃gyroscope array[J].Journal of Southeast University(Natural Science Edition),2013,43(6):1222⁃1226.
[48]张印强,王寿荣.硅微阵列陀螺仪闭环驱动控制技术研究[J].测试技术,2014,33(3):64⁃67.ZHANG Yin⁃qiang,WANG Shou⁃rong.Research on closed⁃loop driving technology for Silicon micro⁃gyroscope array[J].Observation and Control Technology,2014,33(3):64⁃67.
Research Progress in MEMS Gyro Array Technique
SHEN Qiang,LIU Jie⁃yu,WANG Li⁃xin,WANG Qi
(Department of Control Engineering,Rocket Force University of Engineering,Xi'an 710025)
V241.5
A
1674⁃5558(2017)07⁃01445
10.3969/j.issn.1674⁃5558.2017.05.017
2017⁃07⁃24
沈强,男,博士,研究方向为MEMS惯性器件误差建模与补偿、MEMS陀螺阵列以及信息融合技术。
