基于Doppler估计的弹载接收机抗欺骗干扰研究
2017-10-11王雪冬吴盘龙
王雪冬,吴盘龙,恽 鹏
(南京理工大学自动化学院,南京210094)
基于Doppler估计的弹载接收机抗欺骗干扰研究
王雪冬,吴盘龙,恽 鹏
(南京理工大学自动化学院,南京210094)
GNSS接收机在军用方面尤其是高精度制导武器中的应用日益增强。针对卫星信号易受敌方欺骗信号干扰的问题,设计一种基于Doppler频率估计的弹载接收机抗欺骗干扰的方法。首先分析了欺骗干扰和真实信号的Doppler变化特点;然后在捕获阶段利用残留信号检测存在欺骗干扰的卫星编号;最后根据弹载的高动态特性,在跟踪阶段采取扩展Kalman滤波器(EKF)进行载波Doppler频率估计,并根据Doppler变化的相似性提取出欺骗信号。通过仿真实验验证,该方法可以有效排除欺骗信号的干扰。
GNSS;高动态;EKF;载波跟踪;Doppler估计;抗欺骗
Abstract:The use of the GNSS receivers in the military is increasingly strengthened.Aiming at the problem that the GNSS signal is vulnerable to jamming of the enemy's spoofing,a method based on Doppler estimate is designed.The characteristics of Doppler's changes of spoofing jamming and real signal are analyzed.The satellite numbers to be spoofed are detected through the residual information in signal acquisition phase.According to the high dynamic characteristic of the missile,the EKF is used to estimate the carrier Doppler frequency,and the spoofing signal is extracted depending on the similarity of Doppler's change.The simulation results show that this method can effectively eliminate the interference of the deceptive signals.
Key words:GNSS;high dynamic;EKF;carrier tracking;Doppler estimate;anti⁃spoofing
0 引言
卫星信号导航是一种全天候、全球覆盖且无累积误差的导航方式,目前已经广泛应用于军用民用产业。军事上,传统的导弹武器系统采用单一的惯性导航来实现制导功能,其误差会随着时间而累计增加。而在加入卫星导航系统之后,这种累计误差的影响明显地降低甚至消除。随着卫星信号导航定位的精度日益提升,导弹武器系统已经越来越依赖于卫星信号导航。但是,卫星信号在各种干扰(尤其是欺骗性干扰)下具有脆弱性。欺骗信号因为可控制性强、隐蔽性好等特点,深受各国军事研究机构的重视[1⁃2]。在战争状态下,一旦制导武器的卫星导航系统被敌方欺骗信号干扰,将会带来不可估量的损失。本文针对弹载接收机受敌方欺骗干扰的情况,采用基于Doppler估计的方法,排除欺骗干扰对导航定位的影响,对制导武器在战场环境下准确命中目标具有重要意义。
1 欺骗干扰模型及其Doppler分析
欺骗式干扰主要分为两大类,即产生式和转发式。产生式欺骗干扰是欺骗系统直接伪造卫星信号,然后将信号发射出去,使得目标接收机结算到错误的导航电文,从而达到欺骗的效果;转发式欺骗干扰则是将接收到的真实卫星信号进行人为的延时并转发,使得目标接收机得到错误的伪距等信息。产生式欺骗干扰的灵活性较大,可以自主设定欺骗坐标,但是实现难度也较大;转发式欺骗干扰则不需要对卫星信号结构进行了解,实现简单,但是灵活性较差。目前,欺骗干扰源基本采用单一天线发射若干欺骗卫星信号,对接收机进行欺骗干扰[3],可以通过Doppler变化来检测信号的真伪。
信号自卫星上发射的时候,频点是固定的,但是接收机收到卫星的信号时,由于接收机和卫星的视线方向可能存在相对运动,所以收到的信号频率会发生Doppler效应,如式(1)所示。

其中,v(r)、v(s)分别表示接收机和卫星的运动速度,I为接收机和卫星视线方向的单位矢量,λ表示波长。
首先考虑接收机静止的情况,GPS卫星相对于接收机运动2π的时间是11h58min。认为卫星与接收机为二体运动,当卫星与地平线的夹角大约13.9°的时候,视线速度最大,约为929m/s,Doppler频率约为4.9kHz;Doppler变化率平均值约为0.54Hz/s,Doppler频率变化率最大值约为0.936Hz/s。然后考虑接收机运动的情况,如果接收机在与卫星视线方向上有1g的加速度,接收到的信号产生的Doppler频率变化率约为51.5Hz/s。由此可以得出结论,在接收机静止的情况下,接收信号所产生的Doppler频率的变化速度较小;当动态较大的时候,Doppler频率变化的主要因素是接收机的加速度。

图1 欺骗干扰示意图Fig.1 Diagram of spoofing jamming
欺骗信号一般是从欺骗系统的同一个天线发出,而接收机某一时刻的可见卫星是分布在整个天空中的,如图1所示。各颗卫星与接收机的视线方向不同,所以信号的Doppler频率变化率是不同的;而欺骗信号是从同一个欺骗源方向发射出来,所以欺骗信号的Doppler频率的变化率是基本相同的[4]。
2 弹载接收机抗欺骗技术
2.1 捕获阶段的残留信号检测
欺骗源要完全抑制真实信号,必须在接收机天线相位中心产生与真实信号相位相同幅度相反的信号,这在实际操作中是很难实现的[5]。所以一般存在欺骗干扰时,真实信号和欺骗信号是同时存在并可以被捕获到的。可以根据残留信号检测,在捕获阶段判定某颗卫星是否存在欺骗信号。对卫星信号载波Doppler⁃伪码相位的二维不确定范围进行搜多,如果检测到2个或2个以上的时频单元信号的相关值超出了设定门限,那么说明存在针对该卫星的欺骗干扰,将该卫星捕获到的值进行标记并转入跟踪环路。如果仅检测到一个相关值超出门限的时频单元,那么将该捕获结果直接转入跟踪环路。
2.2 跟踪阶段的Doppler估计
在信号的跟踪环路实现对信号的Doppler频率估计。弹载接收机工作时一般处于高动态环境中,信号载波会产生较大的Doppler频率[6],一般的跟踪环路难以对其进行跟踪。目前,高动态载波跟踪的处理方法有两种[7⁃8]。一种是锁相环(PLL)与锁频环(FLL)相结合的方法,此方法是利用FLL对动态较敏感而PLL精度较高的特性,先用FLL粗略跟踪,再转入PLL精确跟踪。但是其收敛速度较慢,且容易失锁。另一种是参数估计的方法,此类算法是假设已知系统的模型和噪声的先验信息,对其Doppler系数等进行估计。本文采用基于EKF的载波跟踪环路对Doppler频率进行估计,其结构如图2所示。
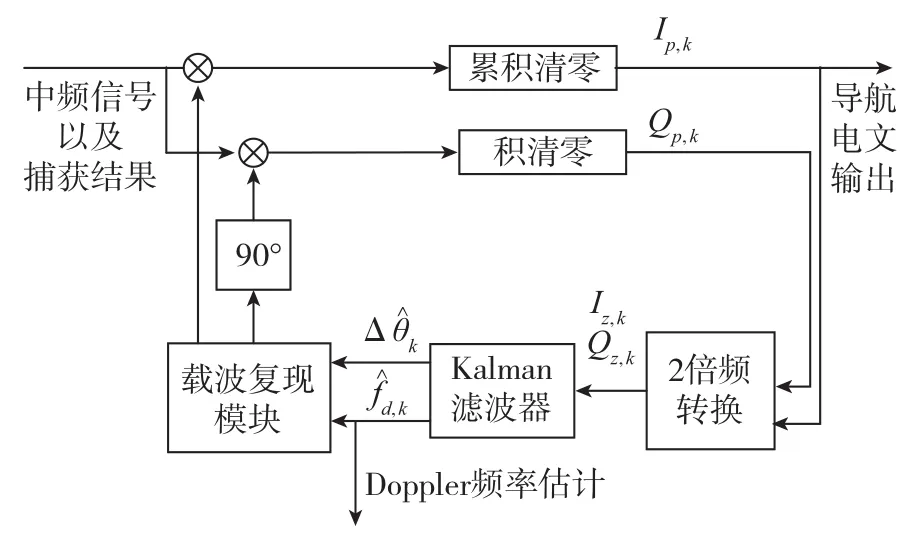
图2 基于EKF的载波跟踪环路结构框图Fig.2 Structure of carrier tracking loop based on EKF
跟踪环路中,Ip,k、Qp,k分别接收信号与本地载波复现以及其90°相位旋转进行混频后,在相干累计时间段内进行累积清零之后的值,下标中k表示以相干累积时间段为单位的历元数,如式(2)所示。
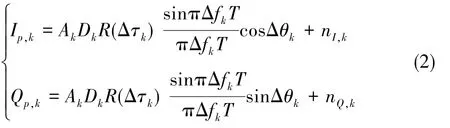
其中,Ak为幅值信息,Dk为k历元时刻的导航电文数据,R(Δτk)表示延时Δτk的自相关函数,Δfk是k历元时刻Doppler频率估计的残差,T是预检测相干累积时间,Δθk表示k历元时刻本地载波相位和接收机载波相位差值,nI,k、nQ,k为相互独立的Gauss白噪声。
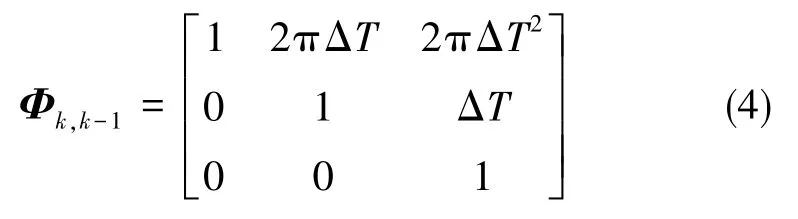
建立EKF滤波模型,考虑在实际情况下,通常采用加速度模型,选取的状态向量。其中,分别表示k历元时刻载波Doppler频率和其1阶导数。建立系统的状态方程可表示为:

其中,ηk-1表示动态模型噪声。状态转移矩阵为:
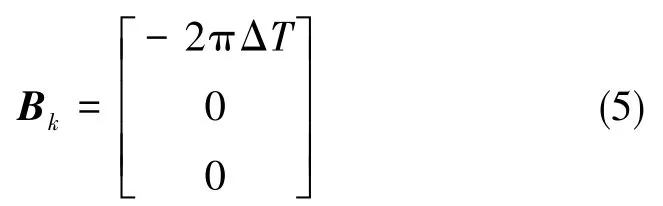
控制量uk=fNCO,k表示k历元时刻载波NCO复现的Doppler频率。
控制矩阵为:
系统的观测方程为:
由于导航电文Dk的翻转是难以预测的,所以在建立系统的观测方程的时候,为了消除电文翻转带来的影响,采用2倍相位转换的方法,如式(7)所示[9]。
其中,因为nI,k、nQ,k与信号相互独立,之间并无耦合,所以ξI,k和ξQ,k也是独立的 Gauss 白噪声。观测矩阵Hk可得:
EKF的算法流程如式(9)~式(13)所示。
预测:
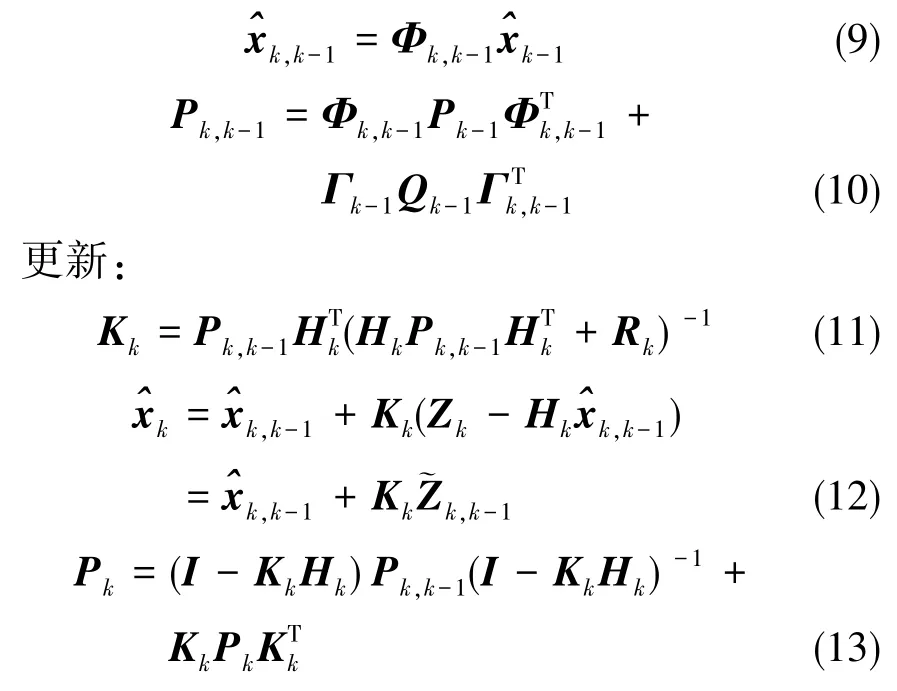
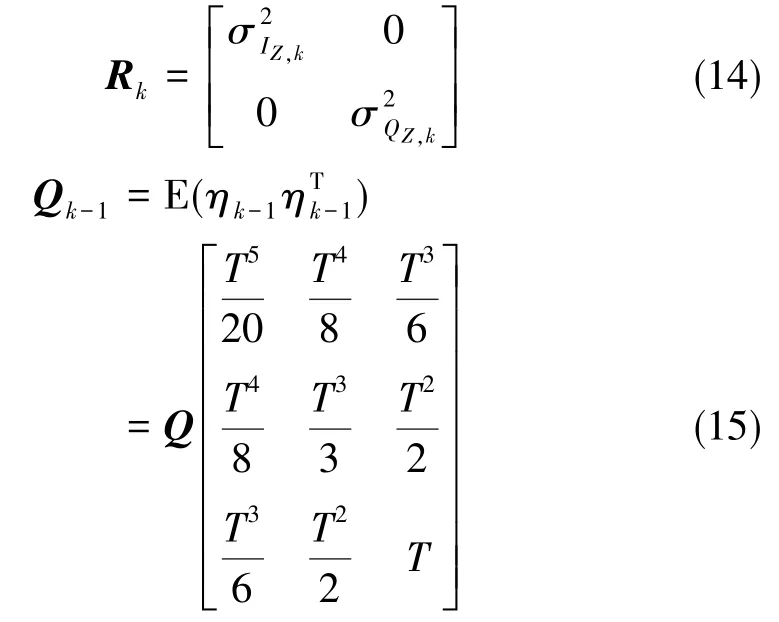
其中,观测噪声协方差矩阵Rk和状态噪声协方差矩阵Qk-1表示如下:
2.3 基于Doppler检测的抗干扰方法设计
通过以上分析,在信号捕获阶段,采取残留信号检测的方法,对可能为欺骗干扰的信号进行标记;将捕获到的所有值均转入跟踪环路,并根据信号的标记状况将不确定的信号进行欺骗信号判定,而没有标记的信号则无需进行判定。最终,将判定为欺骗干扰的信号剔除,将剩余的跟踪结果进入结算定位等环路完成导航的功能。欺骗干扰信号判定的具体流程如下:
1)设定参数。设定欺骗干扰判定环路Doppler估计采样频率和采样时间。
2)输出Doppler估计值。根据设定的参数,以某个时间为起点,对所有标记信号跟踪环路的Doppler估计值进行采样,记为。其中,i表示不同环路,n表示采样点计数。
3)计算Doppler变化值。根据Doppler估计的采样数据,将所有值减去第一个采样点的值,记作。
4)检测Doppler变化相似性。对所有标记信号的任意两个环路(设为x、y)Doppler估计采样值计算相关值Sxy,计算公式如式(16)所示。

5)判定信号是否为欺骗干扰。将计算的相关值Sxy与设定的门限ε作比较,如果小于门限,则判定x、y环路跟踪的是欺骗信号。
具体流程图如图3所示。
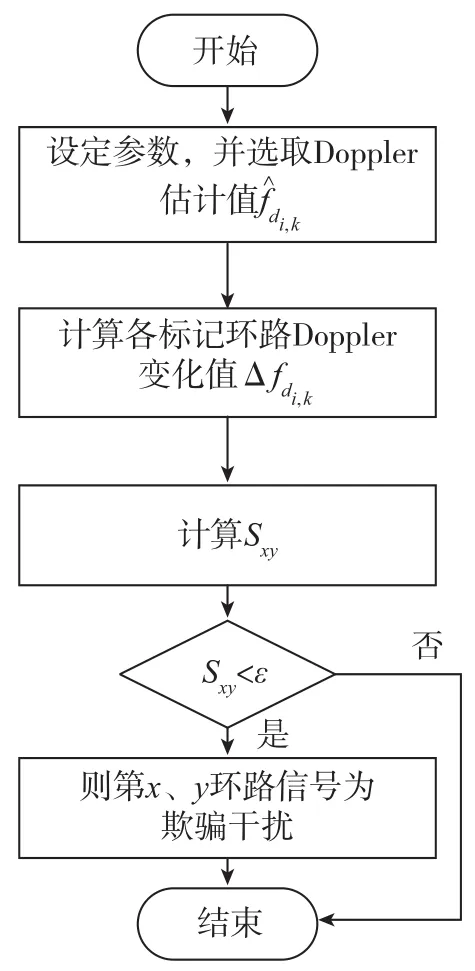
图3 基于Doppler估计的抗欺骗干扰方法流程图Fig.3 Flowchart of the anti⁃spoofing method based on Doppler estimate
3 仿真验证
仿真验证采用JPL实验室定义的高动态特性[10],参数如图4所示。
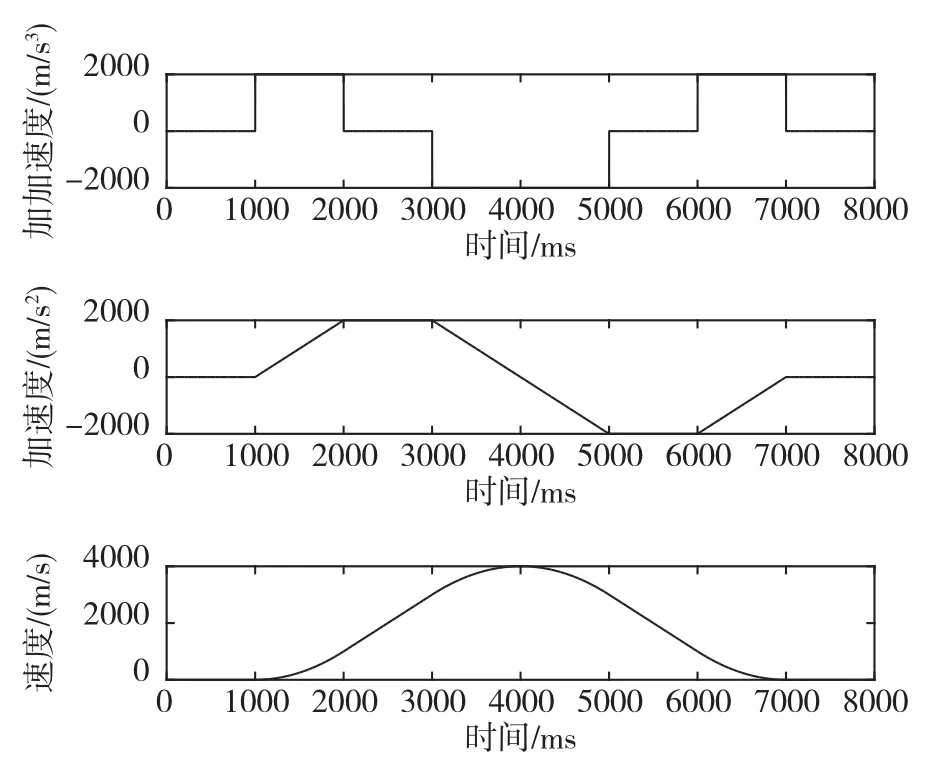
图4 高动态运动模型Fig.4 Model of high dynamic motion
卫星信号的仿真参数为:信号载噪比C/N0=40dB⁃Hz,数字中频Fif=1.5MHz,采样频率fs=5×1.023MHz。对第3、15、21号卫星的信号进行欺骗,欺骗信号的信噪比相对于真实卫星信号高出0.3dB。假定接收机的运动方向恒定,且与接收机和第3、15、21卫星视线方向所成的夹角余弦值分别为0.13、0.10、0.50,与接收机和欺骗源视线方向的夹角余弦值为1。
对卫星信号进行捕获,并进行残留信号检测。以第3号卫星为例,捕获结果如图5所示,对两个捕获结果进行标记。将标记的两个结果分别转入不同的跟踪环路进行跟踪,并估计出Doppler频率,其结果如图6、图7所示。
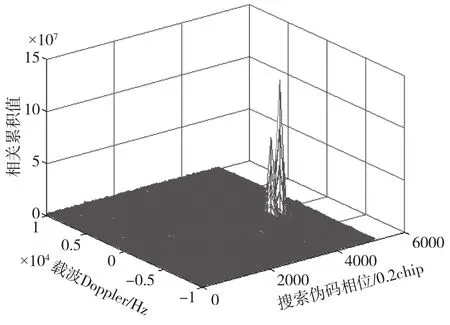
图5 PRN3捕获结果Fig.5 Capture result of PRN3
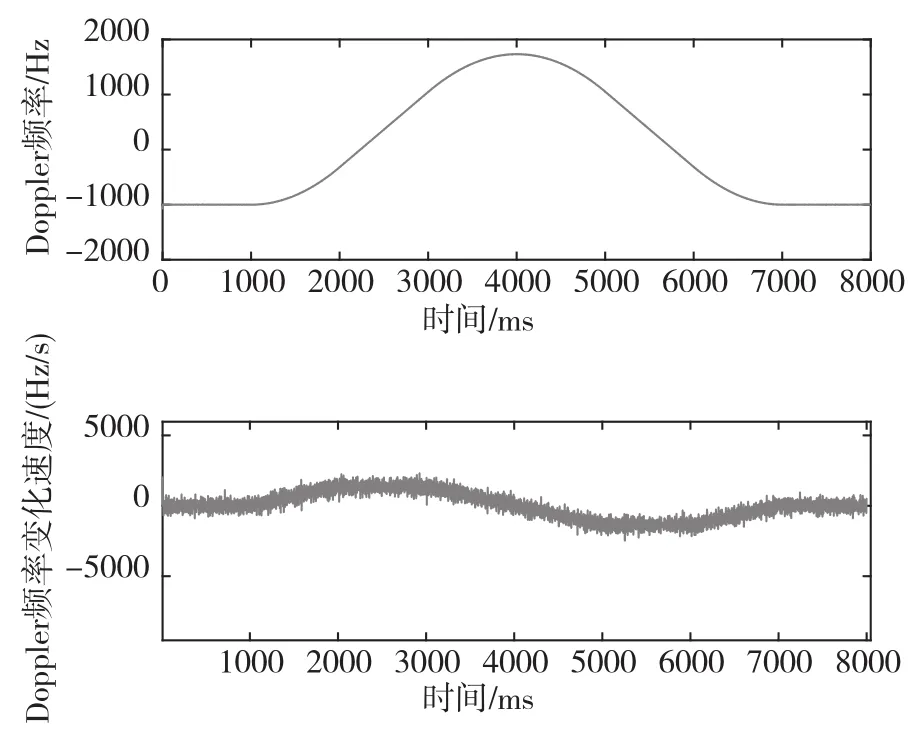
图6 PRN3捕获结果1的Doppler估计Fig.6 Doppler estimate of the capture result 1 of PRN3
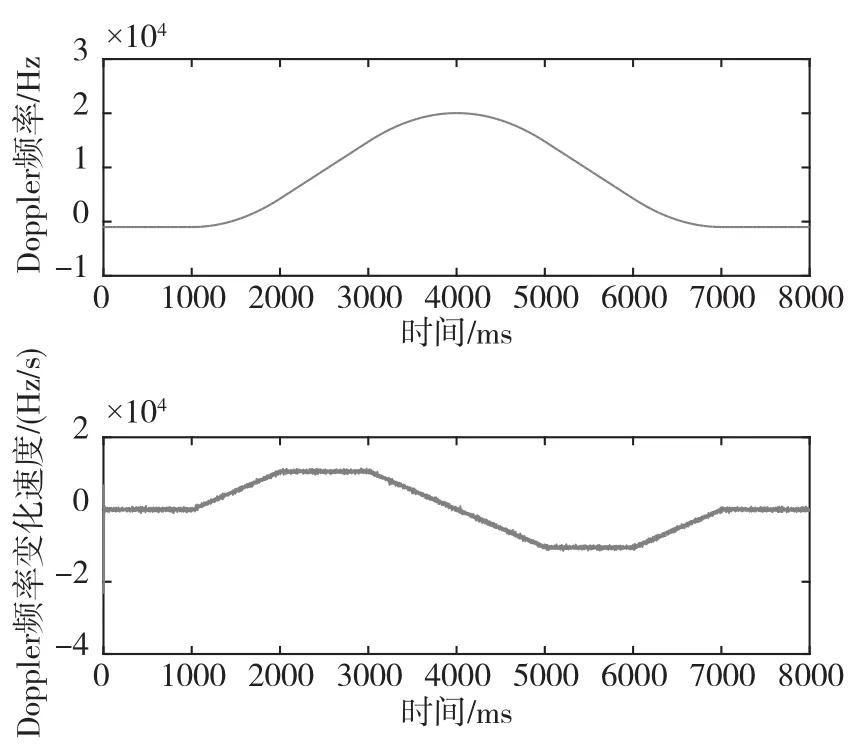
图7 PRN3捕获结果2的Doppler估计Fig.7 Doppler estimate of the capture result 2 of PRN3
同上,通过在捕获阶段进行残留信息检测,可以检测出第15、21号卫星同样存在欺骗信号,对捕获的结果进行标记。将所标记6个信号跟踪环路的Doppler估计输出,以进行欺骗信号的判定。欺骗信号的载波Doppler变化应该十分相似,卫星运动对其影响十分微小,但考虑到跟踪环路Doppler估计存在误差,以误差的大小和采样点来设定门限ε。信号跟踪环路的解调电文和Doppler估计误差如图8所示。
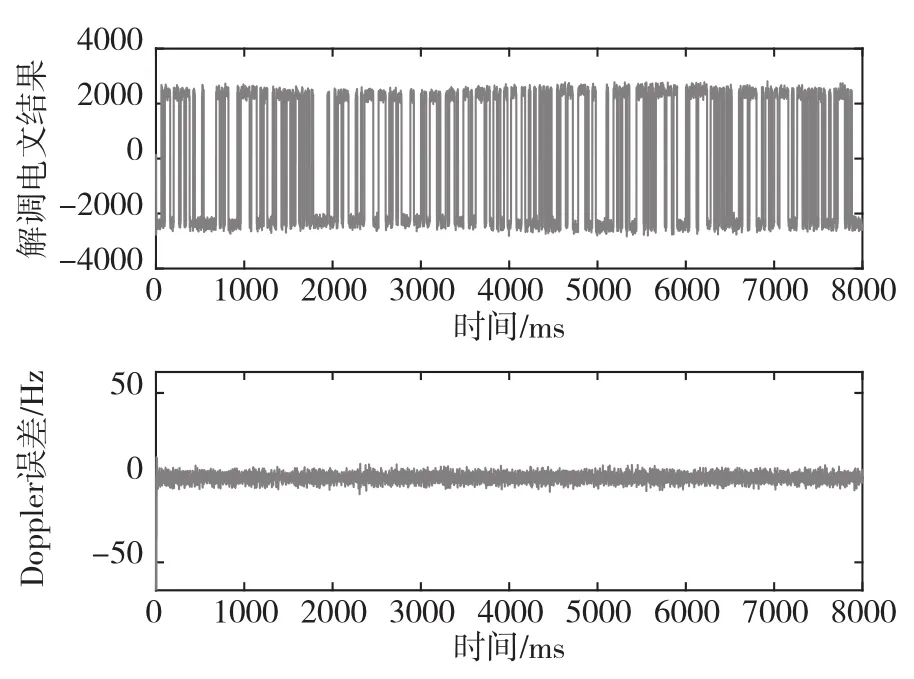
图8 解调电文以及Doppler误差Fig.8 Navigation message demodulation and the Doppler frequency error
根据图8,在设定环境下的Doppler跟踪误差在7Hz以内。设定Doppler采样频率为10Hz,采样时间段为0s~8s,共计Doppler估计采样数目为80个。可以计算得到的欺骗信号间的Sxy允许在80×72=3920之内,选取门限值ω为4000。将6个标记信号的Doppler变化量进行比较,如图9所示。
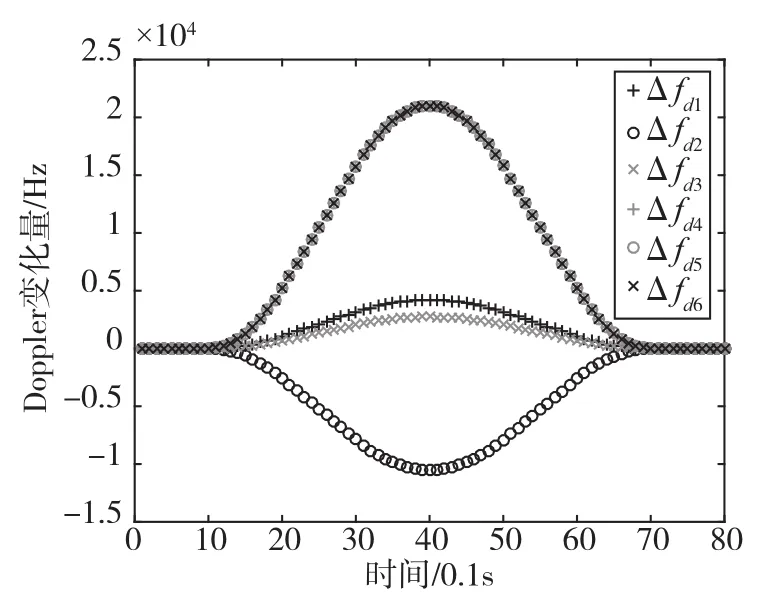
图9 Doppler变化比较Fig.9 Comparison of Doppler frequency changes
通过图9可以看出,在标记的6个信号中,有3个信号的Doppler变化基本一致。计算可得这3个信号的判定值S12=438.3791,S13=501.4954,S23=430.2320,都小于设定的门限值,可以判定这3个信号为欺骗干扰。而有关另外3个信号的判定值要远远大于门限值,判定其为真实信号。通过以上环节,将所有判定为欺骗干扰的信号自结算环节剔除,即达到抗欺骗干扰的目的。
4 结论
针对弹载接收机进行抗欺骗干扰研究,对精确制导武器有效命中目标提供了保障。本文采用基于Doppler频率变化的欺骗干扰判定方法。首先在捕获阶段通过残留信息检测,可以判定捕获到的信号是否存在欺骗干扰;然后将捕获结果转入跟踪环路,针对弹载高动态情况采用基于EKF参数估计的方法,对各个跟踪环路载波Doppler频率进行估计;最后根据跟踪环路结果,采用基于Doppler变化的欺骗检测环节,可以有效排除欺骗干扰对结算环节的影响。
[1]Kim T H,Sin C S,Lee S.Analysis of effect of spoofing signal in GPS receiver[C].12thInternational Conference on Control,Automation and Systems,JeJu Island,2012:2083⁃2087.
[2]Larcom J A,Liu H.Modeling and characterization of GPS spoofing[C].2013 IEEE International Conference on Technologies for Homeland Security(HST),Waltham,MA,2013:729⁃734.
[3]Doisy Y.Theoretical accuracy of Doppler navigation sonars and acoustic Doppler current profilers[J].IEEE Oceanic Engineering,2004,29(2):430⁃431.
[4]Qi W,Zhang Y,Liu X.A GNSS anti⁃spoofing technology based on Doppler shift in vehicle networking[C].Interna⁃tional Wireless Communications and Mobile Computing Conference(IWCMC),2016:725⁃729.
[5]黄龙,唐小妹,王飞雪.卫星导航接收机抗欺骗干扰方法研究[J].武汉大学学报(信息科学版),2011,36(11):1344⁃1347.HUANG Long,TANG Xiao⁃mei,WANG Fei⁃xue.Anti⁃spoofingtechniques for GNSS receiver[J].Geomatics and Information Science of Wuhan University,2011,36(11):1344⁃1347.
[6]耿正霖,聂俊伟,王飞雪.GNSS抗欺骗干扰技术研究[J].全球定位系统,2013,38(4):65⁃70.GENG Zheng⁃lin,NIE Jun⁃wei,WANG Fei⁃xue.Study of GNSS anti⁃spoofing techniques[J].GNSS World of China,2013,38(4):65⁃70.
[7]李理敏,龚文斌,刘会杰,等.基于自适应扩展卡尔曼滤波的载波跟踪算法[J].航空学报,2012,33(7):1319⁃1328.LI Li⁃min,GONG Wen⁃bin,LIU Hui⁃jie,et al.A carrier tracking algorithm based on adaptive extended Kalman filter[J].Acta Aeronautica et Astronautica Sinica,2012,33(7):1319⁃1328.
[8]邓晓东,孙武.基于FLL+PLL的载波跟踪环路设计[J].现代防御技术,2010,38(4):137⁃141.DENG Xiao⁃dong,SUN Wu.Design of carrier tracking loop based on FLL+PLL[J].Modern Defence Technology,2010,38(4):137⁃141.
[9]胡辉,张雪丽,严辉煌,等.基于自适应EKF的高动态载波跟踪算法[J].火力与指挥控制,2016,41(6):51⁃55.HU Hui,ZHANG Xue⁃li,YAN Hui⁃huang,et al.High dynamic carrier tracking slgorithm based on adaptive ex⁃tended Kalman filtering[J].Fire Control& Command Con⁃trol,2016,41(6):51⁃55.
[10]Vilnrotter V A,Hinedi S,Kumar R.Frequency estimation techniques for high dynamic trajectories[J].IEEE Trans⁃actions on Aerospace and Electronic Systems,1989,25(4):559⁃577.
Research on Anti⁃spoofing of Missile Borne Receiver Based on Doppler Estimate
WANG Xue⁃dong,WU Pan⁃long,YUN Peng
(School of Automation,Nanjing University of Science and Technology,Nanjing 210094)
TN927+.2
A
1674⁃5558(2017)01⁃01347
10.3969/j.issn.1674⁃5558.2017.05.002
2016⁃12⁃06
国家自然科学基金(编号:61473153);航空科学基金(编号:2016ZC59006);江苏省六大人才高峰(编号:2015⁃XXRJ⁃006)
王雪冬,男,硕士,导航、制导与控制专业,研究方向为卫星导航。
