基于观测器的两电机卷绕系统张力控制
2017-10-10南海宝史婷娜耿强
南海宝,史婷娜,耿强
(1.天津大学电气与自动化工程学院,天津 300072;2.天津市电机系统先进设计与智能控制技术工程中心,天津 300387)
基于观测器的两电机卷绕系统张力控制
南海宝1,史婷娜1,耿强2
(1.天津大学电气与自动化工程学院,天津 300072;2.天津市电机系统先进设计与智能控制技术工程中心,天津 300387)
在卷绕系统中,需要精确的控制张力,以两电机卷绕系统中收卷和放卷电机为研究对象,提出了一种基于张力观测器的闭环控制方法。首先,通过对张力控制系统各个组成部分的详细分析,找出了影响张力的关键参数;然后,根据卷绕电机的转矩平衡原理,设计了一种张力状态观测器对系统张力进行观测,构成了无传感器张力闭环控制。该方法减小了张力传感器带来的延迟,解决了一些特殊场合下张力传感器无法安装的问题,简单易行。最后,实验结果证明了所提出方案的可行性和有效性。
永磁同步电机;张力观测器;转矩平衡原理;张力控制;卷绕系统
Abstract:In winding system,it is very important to control the tension precisely.Based on the process of rewinding and unwinding,a tension closed-loop control method was proposed.First,through detailed analysis of the various components of tension control strategy,the key parameters that affect the tension were found out.Then,according to the principle of torque balance,a tension observer was designed to obtain the tension,which constituted a sensorless tension closed-loop control.The measurement delay caused by tension sensor was decreased,and the problem that the tension sensor can not be installed in some special occasions was solved.In addition,the proposed sensorless tension control method is simple,and easy to implement.At last,the feasibility and effectiveness of the proposed method are verified by the experimental results.
Key words:permanent magnet synchronous motor;tension observer;torque balance principle;tension control;windingsystem
在造纸、纺织、冶金等带、线材加工生产过程中,需要对张力进行精确控制,张力控制不当容易造成带、线材断裂、褶皱、跑偏等现象[1-5]。目前张力控制方式主要分为开环控制、直接闭环控制和间接闭环控制。由于开环控制方法控制精度低且无法抑制干扰,所以在实际工业生产中大多采用直接闭环控制,然而这种方法由于需要安装张力传感器,不仅价格昂贵,存在延迟,而且张力传感器输出的信号十分微弱,极易受到外部环境的干扰,此外,张力传感器对机械安装精度要求也很高,在一些特殊场合无法应用。
国内外学者在卷绕系统无张力传感器张力控制方面提出了多种实现方案。智利康塞普西翁大学的Valenzuela等人提出了纸卷绕传动系统中无传感器张力控制方案,采用电控式制动双辊机构而非张力传感器对张力进行估算,并分析了几种张力估算方法的优缺点[6-9]。加拿大艾伯特大学的Lynch等设计了一款非线性张力观测器,运用误差线性化、代数观测器和滑模观测器对系统中的张力进行计算和补偿[10]。Song等提出了一种应用于连续卷绕生产线的张力控制方法,这种方法通过直接控制卷绕电机的励磁电流来控制张力的大小,并且对系统加速时所需的转矩进行补偿,得到了较好的张力控制效果[11-12]。文献[13]提出了一种非线性滑模张力控制方法,该方法包括1个滑模速度控制器和2个滑模张力控制器,并且设计了2个张力观测器,并通过仿真证明了张力的观测值能够较好地收敛于张力的真实值。文献[14]为了滤除张力控制中速度的测量噪声,提出了一种扩展的转矩观测器来估算张力。文献[15]设计了一种混合式张力估计和故障诊断方法来估计2个相邻卷绕辊之间的张力,并将这种方法应用在实际轧钢生产线当中。
本文首先对两电机卷绕张力控制系统进行数学建模,并分析了张力控制系统中影响张力的关键参数。然后根据转矩平衡原理设计了一种降阶张力观测器对张力进行观测,并用观测的张力值作为反馈量进行张力闭环控制。最后针对本文提出的方法进行了一系列对比实验,实验结果证明了本文所提出方法的可行性和有效性。
1 卷绕系统的描述与建模
只含有1个张力区的两电机张力系统是张力控制中最基本的单元,主要包括收卷辊、放卷辊、张力传感器和控制器等,其结构如图1所示。
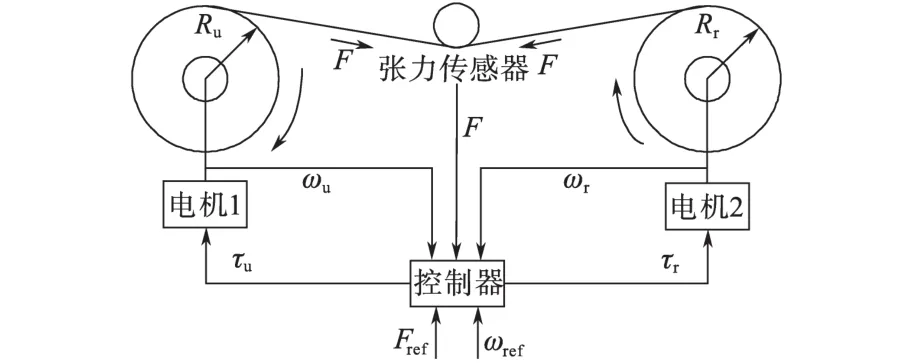
图1 两电机卷绕系统结构图Fig.1 The structure block diagram of two motors winding system
下面对收卷辊和放卷辊的半径和转动惯量的变化进行分析。根据卷径与卷材厚度及收、放卷辊转角位置的关系,有:
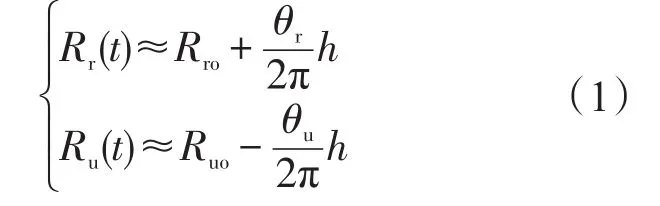
式中:Rr(t),Ru(t)分别为收、放卷辊的半径;Rro,Ruo分别为收、放卷辊的初始半径;θr,θu分别为收、放卷辊的角度增量;h为物料的厚度。
对式(1)微分可以得到收卷辊和放卷辊半径的变化率分别为
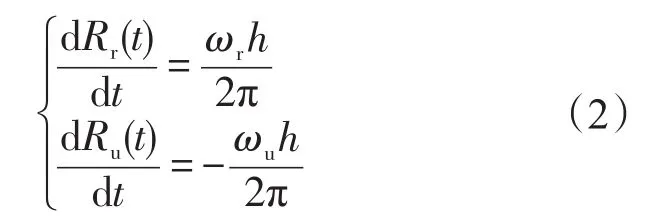
式中:ωr,ωu分别为收、放卷辊的角速度。
收、放卷辊的转动惯量可表示为[19]
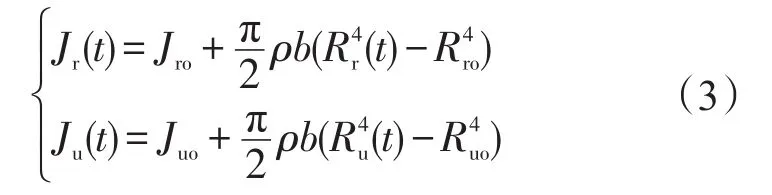
式中:Jr(t),Ju(t)分别为收卷辊和放卷辊的转动惯量;Jro,Juo分别为收卷辊和放卷辊空卷时的转动惯量;ρ为卷材的密度;b为卷材的宽度。
对式(3)求导,可以得到转动惯量的变化率为
下面分析系统的动态方程,根据转矩平衡原理,可以得到:
式中:Ter,Teu分别为收卷电机和放卷电机的电磁转矩;F为系统张力;Tfr,Tfu为库伦摩擦力;Br,Bu为粘性摩擦系数。
将式(1)~式(4)代入式(5),经整理可得:
由式(6)可以看出,张力的大小与卷材的宽度、密度、卷径、收、放卷电机的电磁转矩、库伦摩擦力、粘性摩擦系数及转速等有关,任何一个变量发生变化都会对张力产生影响,因此张力控制系统是一种多变量、非线性、强耦合的控制系统,要想精确地控制张力必须考虑各个因素对张力的影响。
目前工业中应用较多的是含有张力传感器的张力控制结构,如图2所示。放卷电机用来控制整个系统的线速度,收卷电机用来控制系统的张力。图2中,Tcc代表电流环的一阶延迟时间常数,v*代表线速度的给定值。
图2 带传感器的直接闭环控制原理框图Fig.2 The schematic block diagram of direct closed loop control with tension sensor
2 无张力传感器控制系统的设计
2.1 张力观测器的设计
本文针对弹性模量较大的卷绕材料,利用转矩平衡原理对系统张力进行观测,由收、放卷辊的动态方程可知,在系统运行过程中,张力的变化会引起系统收卷辊和放卷辊的动态参数也随之变化,因此通过对收卷辊或放卷辊的动态方程分析均可以得到系统的张力值,且理论上它们是相等的。下面以收卷辊为例进行分析。
把张力F看作状态变量,由于控制器的采样频率非常高,因此在同一个控制周期内可以近似认为张力是一个恒定值,即

由于转动惯量的变化率远小于收卷辊和放卷辊角速度的变化率,因此,式(5)可以近似表示为
由式(7)和式(8)的第1式,建立收卷电机的动力学状态方程为

式中:u为控制输入信号;y为输出量。
为了证明式(9)状态观测器的存在,需要证明式(9)的能观性,令
根据现代控制理论中降维状态观测器的思想,如果将收卷电机的转速作为观测器的校正量,则张力观测器可表示为

由式(9)减去式(11),可得观测误差为

式(12)的特征方程为

由状态观测器稳定的条件可知,如果选择适当的K矩阵,使其特征方程的所有特征根具有负实部,则有

实现系统状态变量可以准确观测的关键是K矩阵的选取,而与状态量x和输入量u无关,设期望观测器的2个特征值分别为α和β,则观测器期望的特征方程为

由式(13)和式(15)可得

观测器的输入电磁转矩可由电机的q轴电流得到,如下式:

式中:KT为收卷电机的转矩系数;iqr为收卷电机的q轴电流。
图3为张力观测器的原理框图,其结构简单,容易实现。
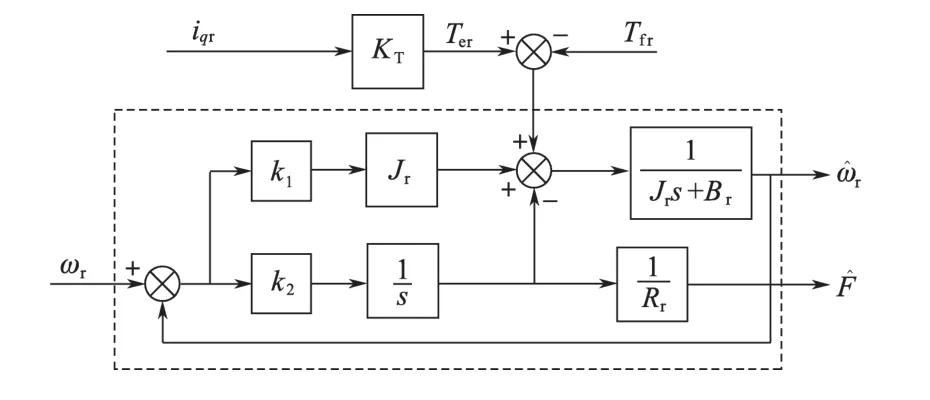
图3 张力观测器原理框图Fig.3 The schematic block diagram of tension observer
通过调节参数矩阵K,可以任意选择观测器极点所在的位置。为使系统稳定,观测器极点应选择在s平面的左半部分。极点离y轴越远,观测器响应越快,但对噪声也越敏感,抗干扰能力变差,因此要适当地选择反馈增益K,使系统既满足响应速度的要求,又能够有效地抑制噪声的干扰。
2.2 基于观测器的张力闭环控制结构图
本文提出方法的控制原理框图如图4所示,主要结构包括1个收卷电机,1个放卷电机,1个张力观测器。收卷电机和放卷电机用于驱动卷绕辊,两电机均采用表贴式永磁同步电机,电机采用电流内环、速度外环的双闭环矢量控制结构,电流环、速度环和张力环均采用积分分离的PI调节器进行控制,其中速度控制器根据带宽整定PI参数,速度信号由增量式光电编码器获得;张力观测器用于观测系统的张力,避免了张力传感器的使用。
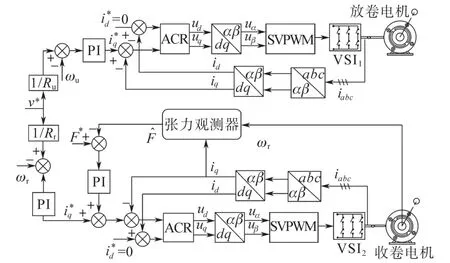
图4 本文提出方法的控制原理框图Fig.4 The control schematic block diagram of the proposed method
3 实验结果及分析
为了验证所提出方案的正确性和可行性,本文搭建了如图5所示的实验系统。
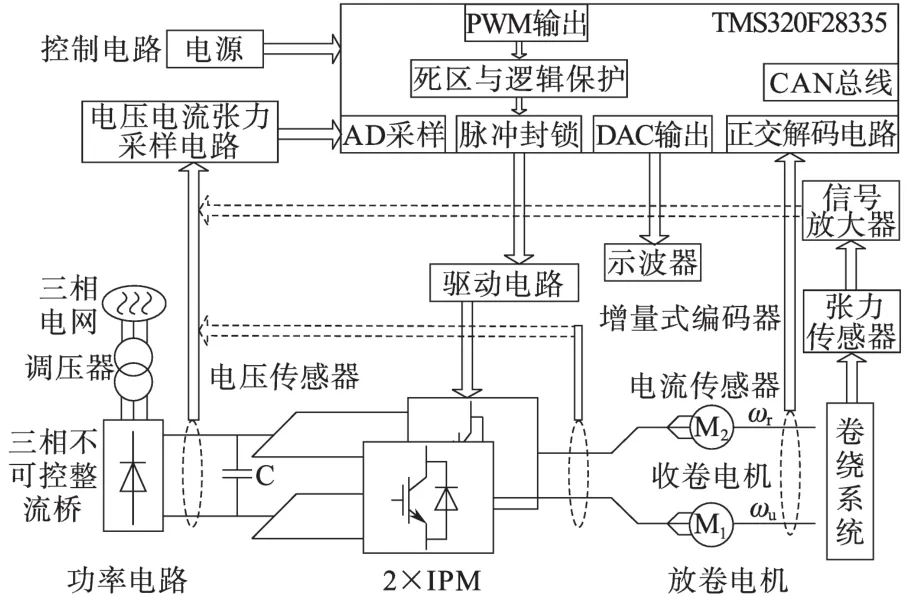
图5 实验系统框图Fig.5 Block diagram of the experimental system
实验系统包括控制电路、功率电路、电流传感器、电压传感器、收卷电机、放卷电机、浮动辊、卷绕材料、连轴器等,主控芯片采用TI公司的浮点型DSP芯片TMS320F28335,功率器件采用三菱公司的IPM模块PS21867,开关频率为5 kHz,卷绕材料为牛皮纸。为了进行对比试验,实验系统中还安装了1个张力传感器,张力传感器采用三菱公司的LX-015-TD,张力信号放大器采用KTC820。具体的实验系统机械参数为:PMSM(收卷电机/放卷电机),电机功率P=2.3 kW,额定转速n=1 500 r/min,转动惯量J=0.002 72 kg·m2,极对数p=2;卷绕辊和卷绕材料,半径(空卷/满卷)0.05/0.12 m,惯量0.002 08 kg·m2,宽度0.18 m,规格(牛皮纸)120 g;张力传感器(LX-015-TD)和放大滤波电路(KTC820),额定容量150 N,放大后满量程输出3 V,滤波时间100 ms。
为了验证张力观测器算法的有效性,本文进行了一系列对比实验。图6和图7分别为带张力传感器的直接闭环控制方法和本文提出的用观测器观测的张力做闭环控制的实验波形。
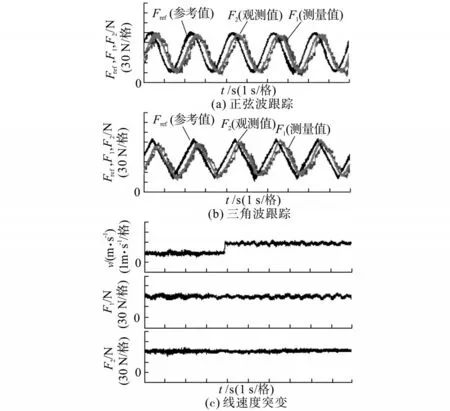
图6 传感器测得的张力值作反馈的实验波形Fig.6 The experiment waveforms using the tension value obtained by sensor as feedback
图6a和图7a分别为2种控制方法下线速度参考值保持1.0 m/s不变,张力跟踪正弦波的实验波形。图6b和图7b分别为2种控制方法下线速度参考值保持1.0 m/s不变,张力跟踪三角波的实验波形。图6c和图7c分别为2种控制方法下张力保持60 N不变,线速度参考值从1.0 m/s突变为2.0 m/s的实验波形。
图6、图7中,v为系统的线速度;Fref,F1,F2分别为张力的参考值、传感器测量的张力值及本文方法观测的张力值。
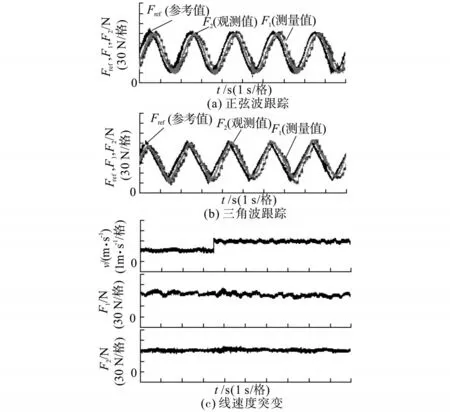
图7 用观测器输出的张力值作反馈的实验波形Fig.7 The experiment waveforms using the tension value obtained by observer as feedback
由于张力传感器本身的特点,其输出的信号只有20 mV,十分微弱,通常需要经过1个信号放大电路和1个滤波电路对输出信号进行处理,本实验中采用张力信号放大器(KTC820)的最小滤波时间常数为100 ms,这也必将造成传感器的信号存在一定的延迟现象。从图6和图7中可以看出,相对于张力的给定值Fref和观测值F2,传感器输出的张力信号F1存在一定的延迟现象。由图6a、图6b和图7a、图7b可以看出,本文观测的张力值能较好地跟踪张力参考值,采用该张力值作闭环控制,能够在一定程度上减小了张力传感器带来的延迟。从图6c和图7c可以看出,当速度突变时本文提出的方法仍能较好地跟踪张力值,基本可以达到用传感器直接闭环控制的效果,证明了本文所提出方法的有效性。
4 结论
本文提出的张力控制方法没有增加系统的检测装置,仅利用收、放卷电机电流信号和由编码器得到的速度信号就实现了无张力传感器的张力闭环控制。对于系统的放卷机构采用速度和电流的双闭环控制,用于设定系统的基准速度;对于系统的收卷机构进行张力闭环控制,使系统能够分别对系统速度和张力进行控制。本文提出的方法运用观测器取代了张力传感器,避免了一些特殊场合下张力传感器无法安装的问题,降低了成本,减小了由于传感器本身特点造成的测量延迟现象,具有一定的实际应用价值。
[1]禹恒洲,鲁五一,郭爱红,等.复合机恒张力控制系统[J].电气传动,2007,37(3):37-40.
[2]郭艳萍.复卷机恒张力控制的设计及实现[J].电气传动,2009,39(2):65-67.
[3]刘星桥,胡建群,周丽.自抗扰控制器在三电机同步系统中的应用[J].中国电机工程学报,2010,30(2):80-85.
[4]尹征琦,朱劲.自适应张力控制[J].电气传动,2001,31(6):35-37.
[5]杨景明,陈雷云,车海军,等.1450 mm冷连轧机活套张力控制系统[J].电气传动,2008,38(12):58-61.
[6]Valenzuela M A,Bentley J M,Lorenz R D.Sensorless Tension Control in Paper Machines[J].IEEE Transactions on Indus⁃try Applications,2003,39(2):294-304.
[7]Carrasco R,Valenzuela M A.Tension Control of a Two Drum Winder Using Paper Tension Estimation[J].IEEE Transac⁃tions on Industry Applications,2006,42(2):618-628.
[8]Valenzuela M A,Carrasco R,Sbarbaro D.Robust Sheet Ten⁃sion Estimation for Paper Winders[J].IEEE Transactions on Industry Applications,2007,44(6):1937-1949.
[9]Guillermo R A,Lorenz R D,Valenzuela M A.Observer-based Estimation of Modulus of Elasticity for Papermaking Process[J].IEEE Transactions on Industry Applications,2014,50(3):1678-1686.
[10]Lynch A F,Bortoff S A,Röbenack K.Nonlinear Tension Ob⁃servers for Web Machines[J].Automatica,2004,40(9):1517-1524.
[11]Song S H,Sul S K.A New Tension Controller for Continuous Strip Processing Line[J].IEEE Transactions on Industry Ap⁃plications,2000,36(2):633-639.
[12]Song S H,Sul S K.Design and Control of Multispan Tension Simulator[J].IEEE Transactions on Industry Applications,2000,36(2):640-648.
[13]Abjadi N R,Soltani J,Askari J,et al.Nonlinear Sliding-mode Control of a Multi-motor Web-winding System Without Ten⁃sion Sensor[J].IET Control Theory Applications,2009,3(4):419-427.
[14]Shin D,Kim W,Lee Y,et al.Observer Based Nonlinear Ten⁃sion Control for Multi Motor Wire Winding System[C]//Proc. 12th International Conference on Automation and Systems(IC⁃CAS),JeJu Island,2012:1333-1336.
[15]Qiang L,Tianyou C,Hong W,et al.Data-based Hybrid Ten⁃sion Estimation and Fault Diagnosis of Cold Rolling Continu⁃ous Annealing Processes[J].IEEE Transactions on Neural Networks,2011,22(12):2284-2295.
Tension Control Method Based on Observer for Two Motor-driven Winding System
NAN Haibao1,SHI Tingna1,GENG Qiang2
(1.School of Electrical Engineering and Automation,Tianjin University,Tianjin300072,China;2.Tianjin Engineering Center of Electric Machine System Design and Control,Tianjin300387,China)
TP29
A
10.19457/j.1001-2095.20170901
国家自然科学基金(51377121)
南海宝(1990-),男,硕士研究生,Email:haibaonan@tju.edu.cn
2016-09-14
修改稿日期:2016-11-02
