基于T-CPU和S120的三维运动控制系统
2017-10-10汤海梅
汤海梅
(天津中德应用技术大学智能制造学院,天津 300350)
基于T-CPU和S120的三维运动控制系统
汤海梅
(天津中德应用技术大学智能制造学院,天津 300350)
运动控制系统在工业自动化中的使用越来越广泛,在定位上有着非常高的精度要求,能够实现快速定位的同时还能够达到相对较高的精度要求。只有这样才能使工业自动化提升到另一个层次,实现驱动控制功能的多样化和复杂性,使生产更灵活,并能提高产品质量和降低设备成本。采用西门子T-CPU,S120伺服驱动器和触摸屏对伺服电机进行精确定位控制,完成图形的绘画和字的书写。
技术型CPU;S120驱动控制器;触摸屏
Abstract:Motion control system is widely applied in industrial automation system.It requires very high precision in positioning system.Motion control system not only implements quick positioning,but also reaches highly precision requirement.Motion control system elevates industrial automation to another level,and realizes the diversity and complexity of drive control functions.The production will be more flexible,the product quality will be improved,and the cost of equipments will be decreased.How to apply Siemens T-CPU and S120 drive control system and touch screen to execute precision positioning control to serve motor were introduced,and drawing writing operation was completed.
Key words:technology CPU;S120 drive control system;touch screen
运动控制起源于早期的伺服控制,简单地说,运动控制就是对机械运动部件的位置、速度、力或者转矩进行实时的控制,使其按照预期的轨迹和规定的运动参数完成相应的动作。运动控制技术渐渐受到世界各国的重视,已经成为机电一体化的核心技术。
国内运动控制技术,像PLC或运动控制板卡,大多都还停留在PTO控制阶段,刚开始向网络转型。PTO控制由于接线比较多,同时容易受到外部干扰,造成控制精度下降,前期布线成本偏高,设备损坏不易修复,很多工厂都对此提出了节省布线、减少干扰、降低维护成本的要求。
本文采用西门子T-CPU采用面向运动控制的工艺功能,直接使用现成的运动控制指令,实现复杂的运动控制任务。对自动化和驱动系统进行改进和扩展,不仅完成S7 PLC功能,还可以通过控制伺服驱动器,完成伺服电机的控制。
S120是西门子公司推出的新一代模块化的驱动控制系统,能够实现通常的V/f控制、矢量控制,又能实现高精度、高性能的伺服控制功能。它不仅能控制普通的三相异步电机,还能控制伺服电机、扭矩电机及直线电机。强大的定位功能可实现进给轴的绝对、相对定位。
1 系统硬件设计
该系统包括西门子T-CPU,S120伺服驱动器和触摸屏TP700。如图1所示,选用西门子T-CPU作为控制器,通过PROFIBUS DP(Drive)连接S120伺服驱动器,通过MPI/DP连接计算机。触摸屏TP700通过Profinet连接T-CPU。

图1 控制系统连接图Fig.1 Connection diagram of control system
T-CPU在SIMATIC CPU内集成了运动控制(motion control)功能和技术功能,基于SIMATIC编程语言LAD,FBD或者STL对T-CPU进行编程。T-CPU主要用在SIMATIC S7-300中的运动控制相关的控制任务和技术要求上。如图2所示,T-CPU一共有2个接口:一个MPI/DP接口,可参数化为MPI或DP接口(主站或从站);另一个DP(驱动器)接口,用于驱动器系统的连接。
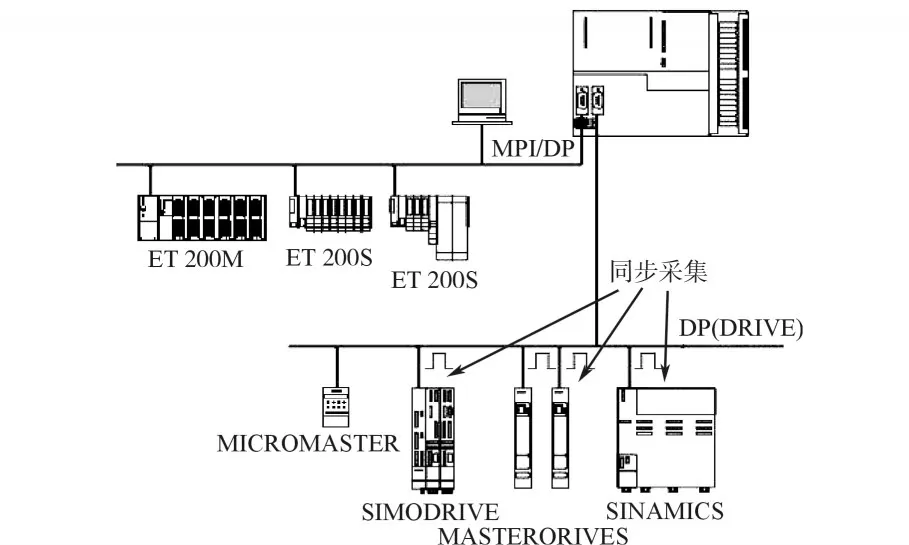
图2 使用T-CPU的典型结构Fig.2 Typical structure with T-CPU
S120伺服驱动器包括控制单元(CU320)、整流模块和双轴电机模块。双轴电机模块配有2个伺服电机轴,分别为X轴和Y轴直线运动装置,该模块由全密封滚珠丝杠组件、高精度直线导轨、刚性联轴器、伺服电机、正反向传感器、原点传感器等组成。2台伺服电机是通过DRIVE-CLIQ接口连接编码器,能精准地反馈电机的运行状态、速度以及位置,能使伺服电机控制精度更高、定位更加准确。
Z轴也采用滚珠丝杠结构,Z轴主要负责在运动过程抬起、落下画笔,不需要高精度的控制,所以采用直流电机拖动,直流驱动系统采用2个继电器模块,可进行正、反转的控制,同时增加电路保护功能,避免因程序错误引起的正、反转同时接通所产生的短路现象。Z轴上面设置了2个传感器,其作用是限制每个轴移动的距离为安全距离,这样才能保证设备的安全性。同时,调节下方传感器的位置,也可以调节画笔的力度。
西门子TP700触摸屏,具有Profinet以太网接口、PROFIBUS DP接口、USB接口等,可以为画笔设备添加人机界面,控制XY轴伺服电机的速度、位置;控制Z轴直流电机的上升、下降,使系统更加人性化,易于操作。
2 软件设计实例
2.1 组态315T
T-CPU可以在STEP 7中和选件包S7-Technology V3.0中进行组态和编程。在HW Config中选择配置文件“SIMATIC Technology CPU”。S7-Technology还包括1个库,包含与PLC open兼容的标准功能块,用于对运动控制任务进行编程。在STEP 7用户程序中调用这些标准功能块。图3为硬件组态画面。

图3 硬件组态的画面Fig.3 Picture of hardware configuration
由图3所示,在组态315T中,需要对DP进行相关设置:
1)设定DP的地址,包括S7-300硬件组态中各驱动器的DP地址设定,硬件组态中设定的地址必须和S120的DP地址保持一致;
2)DP报文的设置。在通讯过程中,S7-300和S120需要进行数据交换的报文结构选择为SIEMENS Telegram 105 PZD10/10。驱动装置用做伺服位置控制。
2.2 组态S120
首先需要设定S120 DP地址。当使用DP地址开关设置时,按照二进制编码组合方式来设定。组态S120,由于驱动系统的组件配备了DRIVE-CLIQ接口,所以S7T Config将自动检测驱动系统的拓扑结构和组件,执行自动组态功能,自动识别各个电机模块,图4是配置完成的画面。
需要注意的是,在S120侧,选择105报文,报文结构与S7-300侧一致,显示为“对勾”,如图5所示。

图4 配置完成的画面Fig.4 Picture of configuration completed

图5 S120侧的报文结构Fig.5 Telegram construction of S120
2.3 编写PLC程序
以画五角星为例简要说明。
2.3.1 设计思路
如图6所示,设五角星的外接圆圆心为O,半径r=10(单位长),设A点坐标为(0,10),外圆上的其它4点按逆时针方向依次为:B,C,D,E;内圆下顶点为F,其它4点依次为G,H,I,J,连OA,OB,OC,OD,OE,OF,OG,OH,OI,OJ,则AIJC,AHGD,BIHE,BJFD,EGFC均为直线,共5条,通过勾股定理和三角函数公式可以算出其他4点的坐标:B的坐标为(-9.510 6,3.090 2),C的坐标为(-5.877 9,-8.090 2),D的坐标为(5.877 9,-8.090 2),E的坐标为(9.510 6,3.090 2)。

图6 五角星的坐标Fig.6 Five-pointed star coordinate
2.3.2 流程图
图7所示为编写画五角星程序的流程图,按照ADBEC的顺序进行。

图7 流程图Fig.7 Flow chart
如图8所示为a点到b点斜线的画法。先用手动方式把画笔移动到a点的位置,坐标为(m,n),再把画笔移动到b点,坐标为(p,q)。设X轴以一个固定的速度,利用,求出X轴实际运行的时间,因为X轴和Y轴要同时到达,所以时间相同。利用,求出Y轴到达b点所需要的速度,这样就能画出从a点到b点的斜线。
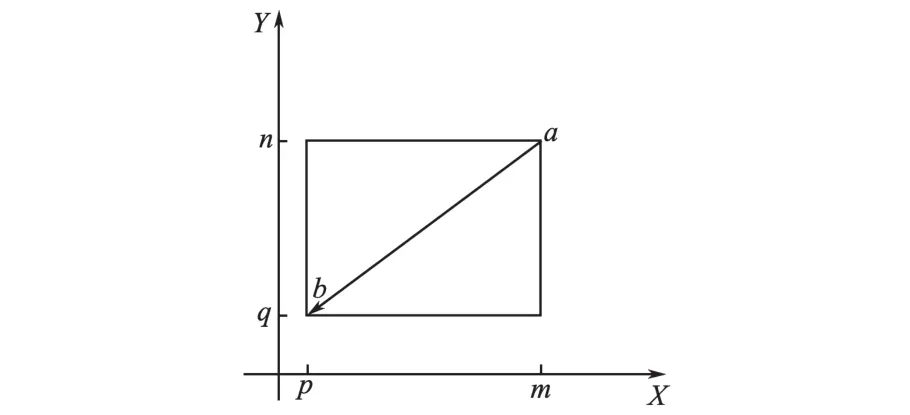
图8a点到b点斜线的画法Fig.8 Drawing method of line fromapoint tobpoint
画笔首先运到a点上方,然后Z轴下降,使画笔充分接触画板,按照计算的速度v,X,Y轴同时运动到b点,X,Y轴运动完成后,Z轴上升,抬起画笔,运动完成。
画五角星可以根据上述方法。设五角星的5个顶点分布位置关系如图9所示,移动画笔读出5个点的坐标。假设X轴的速度设定为30 mm/s,当画笔从零点到第①点时,因为画笔没有涉及到画斜线的步骤,所以Y轴的速度可以随意设定,假设也设定为30 mm/s;画笔运行到第②点时,由于Y轴没动,所以它的速度可以设为0;画笔运行到第③点时,可以通过上述公式,利用X轴和Y轴的运行时间相同求出Y轴的速度,将第③点的坐标和2个轴的速度写入程序,同理到达第④点和第⑤点速度就可以求出来。

图9 5个顶点的分布位置Fig.9 Distribution location of five points
将求出的5个点的坐标及到达各个点的速度,用“MOVE”程序块将坐标和速度传送和保存在已经建好的DB块中。如图10所示,这是到达第③点的速度设定和第③点的坐标设定,DB20. DBD0和DB21.DBD0分别为X轴和Y轴的坐标,DB20.DBD4和DB21.DBD4分别为X轴和Y轴的速度设定值,这样坐标和速度就能保存在DB数据块中。下一步就是将DB块中的数据传送到电机中,用“MC_MoveAbsolute”程序块,通过这个模块PLC就能控制伺服电机运行的速度和绝对位置。这个程序块控制的是X轴的绝对位置和速度,DB20.DBD0给到了position处,DB20.DBD4给到了velocity处,再通过“MC_Power”程序块分别给上2个轴的使能,画笔就能按照预定的轨迹运行。以上是5点画五角星的方法,10点画五角星与5点画五角星方法基本相同。
Z轴的运动程序是固定的,主要用于抬笔和落笔,在运动过程中应有相应保护,避免笔尖受力过大而损坏。Z轴控制程序如图11所示。

图10 PLC程序Fig.10 PLC program

图11Z轴控制程序Fig.11Zaxis control program
2.3.3 程序
OB1主程序包含5个子程序,如图12所示。其中,FC1为X,Y和Z轴的保护功能块。FC2为调用S7-Tech功能块(以X轴为例,自动生成使能轴功能块FB401、复位功能块FB402、找原点功能块FB403、正常停车功能块FB405和绝对定位功能块FB410),如图13所示。FC3为上电复位功能块。FC4为手动功能块(包括以固定速度横向进给功能块FB414),如图14所示。FC5为自动功能块。

图12 关系框图Fig.12 Relationship diagram
2.4 触摸屏界面的设计
系统上电后,进入选择页面,如图15所示。
在此可以选择手动画面,后者自动画面。手动画面可以进行系统回零设置,自动画面可以对系统的运行状态进行监控。手动画面如图16所示。点击X轴使能,使能灯亮,点击X轴正转,则X轴正向运行,点击X轴反转,则X轴反向运行,在程序中有限位保护,到达限位点时会自动停止。点击Y轴使能,使能灯亮,点击Y轴正转,则Y轴正向运行,点击Y轴反转,则Y轴反向运行,在程序中有限位保护,到达限位点时会自动停止。点击Z轴正转,则Z轴向下运行,点击Z轴反转,则Z轴向上运行,在程序中有限位保护,到达限位点时会自动停止。

图13调用S7-Tech功能块Fig.13 Calling S7-Tech Function block
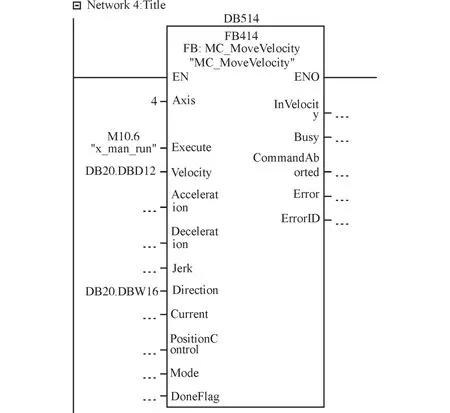
图14 以固定速度横向进给功能块Fig.14 Function block of traverse feed in fixed speed

图15 触摸屏界面Fig.15 Touch screen interface

图16 手动画面Fig.16 Manual operation screen
3 结论
本文运动控制器采用西门子SIMATIC 315T控制器,驱动部分采用通用性强、性能出众的SINAMICS S120伺服驱动器,这两者的结合使用,可轻松满足运动控制系统对响应速度、定位精度、同步精度等方面内容的要求。同时用西门子TP700型号的触摸屏控制伺服电机的速度、位置,使系统更加的人性化,易于操作,系统运行稳定。
控制器与驱动系统采用的网络通讯方式,有效避免了PTO的干扰,同时由于可以实时读取伺服驱动数据,有效将系统提升为全闭环控制系统,提高了系统的精度。系统的布线减少,模块化增加可方便进行维护升级。
系统实现了3个维度的运动控制,X轴Y轴运行精度和效率都很高,如果把Z轴也更换为伺服电机,则可以提高画笔的力度和运行效率,如果将Z轴工具更换为搬运夹具,则系统可用于立体空间内的搬运,码垛、装配等,所以此模型有很大的二次开发价值。
[1]王薇.深入浅出西门子运动控制器—SIMOTION实用手册[M].北京:机械工业出版社,2015.
[2]田宇.伺服与运动控制系统设计[M].北京:人民邮电出版社,2010.
[3]杨耕,罗应力.电机与运动控制系统[M].北京:清华大学出版社,2014.
[4]李方园.零起点学西门子变频器应用[M].北京:机械工业出版社,2012.
[5]班华.运动控制系统[M].北京:电子工业出版社,2012.
3D Motion Control System Based on T-CPU and S120
TANG Haimei
(Intelligent Manufacturing College,Tianjin Sino-german University of Applied Sciences,Tianjin300350,China)
TP271
A
10.19457/j.1001-2095.20170911
汤海梅(1970-),女,本科,副教授,Email:haimei_tang@sina.com
2017-04-05
修改稿日期:2017-07-06
