轴距预瞄的车辆主动悬架多目标控制与仿真
2017-09-29镇江高等专科学校汽车工程学院江苏镇江003江苏大学汽车与交通工程学院江苏镇江03
王 琦,何 仁(.镇江高等专科学校 汽车工程学院,江苏 镇江 003; .江苏大学 汽车与交通工程学院,江苏 镇江 03)
轴距预瞄的车辆主动悬架多目标控制与仿真
王 琦1,何 仁2
(1.镇江高等专科学校 汽车工程学院,江苏 镇江 212003; 2.江苏大学 汽车与交通工程学院,江苏 镇江 212013)
当前,车辆行驶过程中容易受到障碍物干扰,产生振动较大,从而影响乘坐的舒适性.对此,采取轴距预瞄系统控制车辆行驶产生的波动幅度.构造了4自由度1/2车辆模型简图,采用静态输出反馈设计轴距预瞄控制器,定义了H∞范数和广义H2范数,引用了迭代线性矩阵不等式和锥补线性化算法,说明闭环控制系统的稳定性.设置车辆轴距预瞄系统多目标控制的仿真参数,在Matlab/Simulink环境下进行仿真,与无轴距预瞄控制系统的仿真结果进行对比.仿真结果显示,与无轴距预瞄系统相比,有轴距预瞄控制系统的加速度和角加速度峰值分别降低了48.6%和59.3%,而且车辆整体振动幅度明显降低.采用轴距预瞄控制汽车主动悬架系统,可以提高车辆乘坐的舒适性.
轴距预瞄; 车辆主动悬架; 多目标控制; 仿真
车辆悬架系统类型分为被动悬架、半主动悬架及主动悬架[1].汽车悬架系统主要用于提供车辆行驶的稳定性,并且支撑汽车在路面的重量.为了提高行驶的稳定性,许多研究人员对车辆的被动、半主动及主动悬架进行了研究.被动悬架结构简单,刚度和阻尼系数不能进行调整,主要用于低档车辆,在行驶过程中,稳定性较差.半主动悬架虽然优于被动悬架,但也无法满足驾驶员高舒适度的要求.面对道路的不平整,如何提高驾驶员及乘客舒适度受到了广泛的关注.
汽车行驶过程中,车辆悬架系统会产生振动现象.如何提高车辆行驶的稳定性,许多研究者对车辆悬架系统进行了研究.例如:文献[2-3]建立了车辆被动悬架简图,构造了汽车被动悬架系统的优化模型,采用区间优化方法对目标函数进行优化,将被动悬架优化后的参数进行仿真,车辆经过路面凸起物体垂直方向的振动加速度值降低,提高了车辆行驶的稳定性.文献[4-5]研究了车辆半主动悬架系统,采用遗传算法优化模糊PID控制模型,在ADAMS/View中构造了机械动力学模型,通过Matlab/Simulink模块完成模糊PID控制器的仿真,仿真结果显示,优化后的PID控制系统车身加速度、悬架动扰度和轮胎动载荷明显降低,提高了车辆行驶的平稳性和操作稳定性.文献[6-7]研究了2自由度1/4车辆主动悬架模型,建立了车辆运动微分方程,采用遗传算法优化线性二次型调节器,后通过仿真进行验证,有效地降低车辆垂直方向的加速度,提高了车辆行驶的平稳性.但是,车辆在遇到路面干扰情况下,车辆悬架垂直方向产生的加速度及车身俯仰加速度较大,很难保证车辆快速行驶的稳定性.对此,本文创建4自由度1/2车辆主动悬架振动模型,推导了车辆垂直方向和俯仰的控制方程式.设计了轴距预瞄控制器,引用了迭代线性矩阵不等式和锥补线性化算法说明闭环控制系统的稳定性,在外界干扰条件下进行仿真验证,并且与无轴距预瞄控制器仿真结果进行对比和分析,为车辆主动悬架的控制提供了参考依据.
1 车辆悬架1/2模型
本文研究的是4自由度半车模型,如图1所示.其中:a和b分别为质心到前轮、后轮的水平距离;M和J分别为簧载质量和转动惯量;mf和mr分别为前部非簧载质量、后部非簧载质量;λf和λr为控制力;参数kf1和bf分别指前总成被动悬架元件的刚度和阻尼系数;kr1和br分别为后总成被动悬架元件的刚度和阻尼系数;kf2和kr2分别为前轮和后轮的刚度.
假设车辆悬架模型俯仰角很小,而悬架元件特征呈线性,则运动方程式[8]为
(1)

图1 车辆悬架1/2模型Fig.1 A half model of vehicle suspension


(2)

控制输入、路面输入[9]为
(3)
式中:wr为wf的时滞,即wr(t)=wf(t-τ),τ=(a+b)/v,v为汽车前进的速度(m/s).
因此,形成下列状态空间形式的控制方程为
(4)
式中:y为测量输出;A,B,C和D为车辆参数常数矩阵.
设计汽车主动悬架时,主要考虑以下几个方面.

(2) 悬架挠度限制.汽车悬架应支撑汽车静态重量.必须考虑悬架挠度来避免过度悬架托底,过度悬架托底可能导致结构损坏.悬架压缩行程应限制在指定范围,即
|zf-ηf|≤zfmax
|zr-ηr|≤zrmax
(5)
式中:zfmax和zrmax分别为前部、后部的最大悬架挠度.
(3) 接地性.干扰作用下车轮和路面之间需要稳固连续接触.动态轮胎负荷不得超过静态轮胎负荷,即
(6)
(4) 执行器饱和.考虑到驱动力有限,主动控制力不得超过特定限制,即
|λf|≤λfmax
|λr|≤λrmax
(7)
式中:λfmax和λrmax分别为前轮、后轮的最大控制输入.
簧载质量的加速度应尽量减少,从而提供良好行驶平顺性.根据不同目标,通过使用状态空间描述,我们对下列输出变量进行了定义:
(8)
式中:G,H和F为离散时间矩阵;C,D和Dw为连续时间矩阵.
2 轴距预瞄系统
后轮所有预瞄信息的向量表达式[10]为
(9)
式中:Na∈N0为τ/Ts的整数部分,Ts为系统采样时间段.
前轮经过路面凸起部分设计模型为
(10)
式中:a为路面类型相关常量;ξ为高斯白噪声,且
E[ξ(t1)ξ(t2)T]=2αvσ2δ(t1-t2)
(11)
式中:σ为路面不平度的标准差;δ(t)为狄拉克函数.
前轮和后轮所受干扰的离散时间为
(12)
式中:Gw=e-avTs;Φ(k)为随机积分

(13)
式中:W(s)为维纳过程,E(dW2)=2avσ2dt.
增广向量xa的状态空间为
xa(k+1)=Gaxa(k)+Faψ(k)
(14)
式中:ψ为单位方差白噪声序列.
预瞄采样时间段为系统采样时间段的整数倍,即Tp=lTs.因此,后轮预瞄信息的测量输出向量ya(k)为
ya(k)=Caxa(k)
(17)
因此,增广状态向量和测量输出如下:
(20)
3 多目标干扰抑制
从w到z的传递函数算子T的H∞和广义H2范数分别定义[11]为
(21)

从干扰因素ψ到输出z1,z2的传递函数分别为T1和T2.因此,本文所要解决的问题为:控制器要具备轴距预瞄,增广闭环系统内部稳定,T1的H∞范数实现最小化,且T2的广义H2范数小于特定γ2.由于研究扰动的时间为有限时间跨度,干扰信号可视为能量有界,因此,可将H∞范数和广义H2范数用作指标.H∞和广义H2性能通过以下引理[12]评价.
引理1当存在矩阵P1>0时,以u=0为条件的系统式(20)渐近稳定,且‖T1‖∞<γ1,故
(22)
引理2当存在矩阵P2>0时,以u=0为条件的系统式(20)渐近稳定,且‖T2‖GH2<γ2,故
假设采用静态输出反馈控制器为
u(k)=Kyg(k)
(25)
通过同时考虑引理1和2来得出下列命题.
最后,上海市图书馆学会阅读推广委员会副主任、上海师范大学图书馆副馆长蔡迎春代表本次大赛的策划和组织方新媒体阅读推广委员会作了总结发言。
命题1当存在矩阵P>0和K时,闭环系统式(20)渐近稳定,且满足‖T1‖<γ1,‖T2‖GH2<γ2,故
(26)
(27)
(28)
由于存在BgKCyP等双线性项,无法直接解出上述矩阵不等式.采用下列迭代线性矩阵不等式算法来计算输出反馈控制器.
(1) 设i=1,当存在矩阵W>0和K1时,系统式(20)渐近稳定,此时可选择初始矩阵K1,因此
(29)
(2) 针对不变量Ki,解出Pi>0和γ1i的下列最优问题,根据下列约束实现γ1i最小化:
(3) 针对不变量Pi>0,解出Ki的下列可行性问题,找出受限于迭代线性矩阵不等式的Ki.
(4) 如果|(γi-γi-1)|<ε,其中ε>0为限定标准,那么停止解题.否则设i=i+1且Ki=Ki-1,然后转入第(2)步.
式(29)的渐近稳定条件无法通过使用凸规划技巧直接解决.因此,提出了锥补线性化算法,引进了新矩阵Q>0.式(29)成立需要满足下列条件:
锥补线性化算法如下:
(1) 设i=1,随机选择初始W0>0,Q0>0.
(2) 解出mintr(WiQ+WQi),设定Wi=W,Qi=Q.
(3) 将得出的矩阵W代入式(29),如果极小数ρ>0不满足不等式(27)和|tr(WiQ+WQi)-2n|<ρ,n=dim(Ag)的其中一个,那么设i=i+1,并转入第(2)步.
4 仿真及分析
假设车辆行驶的速度为v=54 km/h,系统采样时间段为Ts=0.025 s,簧载质量M=500 kg,前部非簧载质量mf=25 kg,后部非簧载质量mr=35 kg,转动惯量J=900 kg·m2,被动悬架元件的刚度kf1=10 000 N/m,kr1=10 000 N/m,被动悬架阻尼系数bf=1 000 N/s,br=1 000 N/s,前轮的刚度kf2=100 000 N/m,后轮的刚度kr2=100 000 N/m,质心到前轮的水平距离a=1.4 m,质心到后轮的水平距离b=1.6 m.在Matlab/Simulink环境下进行仿真,并且与无预瞄主动悬架控制仿真结果进行对比.车辆垂直加速度仿真结果如图2所示,车辆俯仰角加速度仿真结果如图3所示.
根据图2可知,带有轴距预瞄系统的车辆主动悬架垂直方向所产生的加速度最大值为0.19 m/s2,而无轴距预瞄系统的车辆主动悬架垂直方向所产生的加速度最大值为0.37 m/s2,加速度峰值大约降低了48.6%,整体波动幅度较小.根据图3可知,带有轴距预瞄系统的车辆主动悬架所产生的角加速度最大值为0.275 m/s2,而无轴距预瞄系统的车辆主动悬架所产生的角加速度最大值为0.675 m/s2,角加速度峰值大约降低了59.3%,整体波动幅度较小.因此,车辆行驶过程中受到外界环境干扰时,车振动幅度较小,运动相对平稳.

图2 车辆垂直加速度仿真结果Fig.2 Simulation results of vehicle acceleration
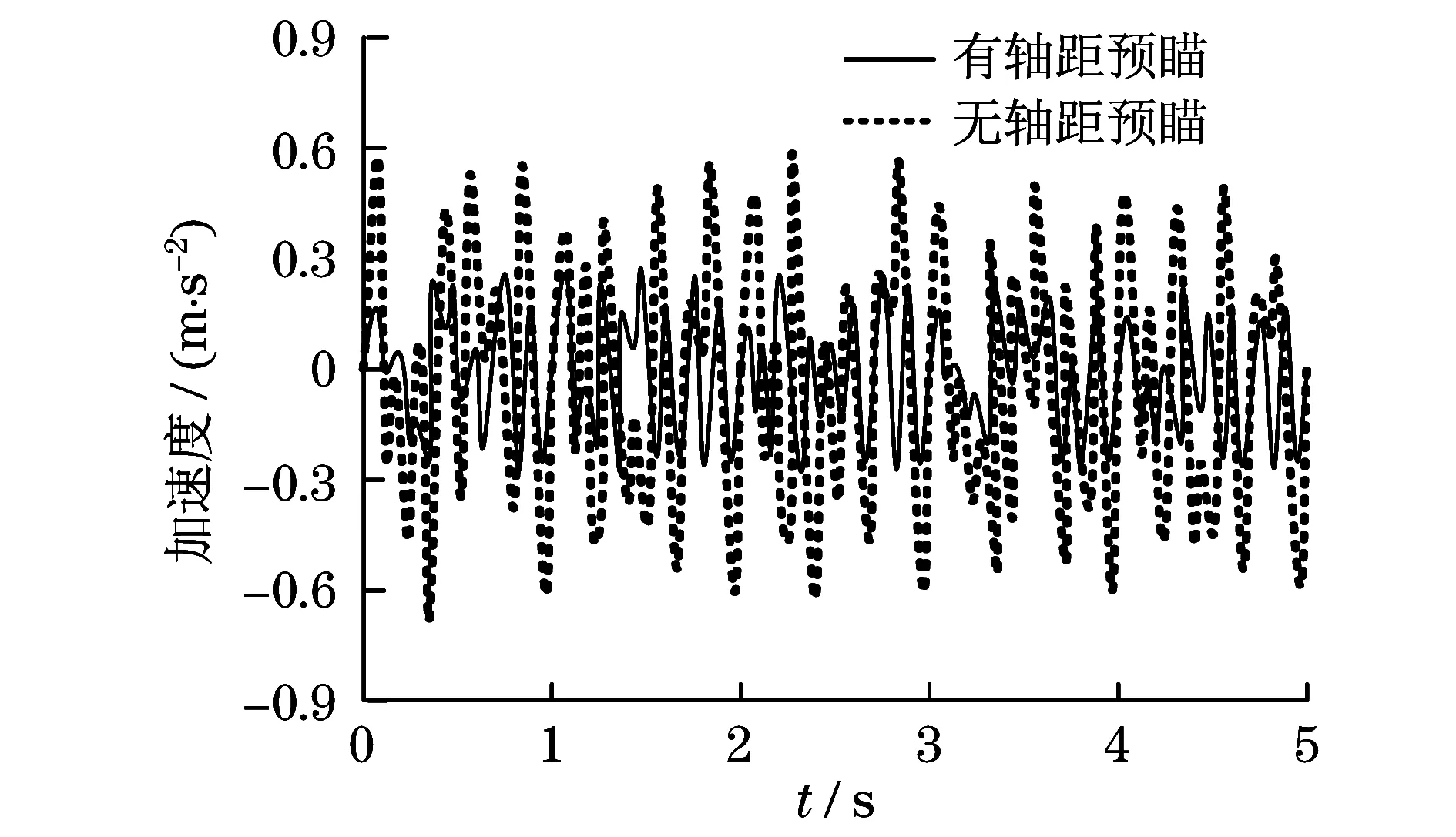
图3 车辆俯仰角加速度仿真结果Fig.3 Simulation results of acceleration ofpitch angle of vehicle
5 结语
本文研究了4自由度1/2车辆悬架模型,推导了车辆悬架系统垂直方向和俯仰的运动控制方程式.设计了车辆轴距预瞄控制系统,对控制系统的稳定性进行了阐述.设置干扰参数,在Matlab/Simulink环境下对车辆垂直加速度和俯仰角加速度进行仿真.同时,与无轴距预瞄控制系统的仿真结果进行比较.仿真结果显示,车辆采取轴距预瞄控制系统,行驶过程中受到外界干扰时,车辆垂直加速度和俯仰角加速度分别降低了48.6%和59.3%,车辆振动幅度减弱,从而提高车辆行驶的稳定性.
[1] 张玉杰.基于Matlab的轿车主动悬架系统仿真研究[D].天津:河北工业大学,2013.
ZHANG Y J.The simulation research of the vehicle active suspension based on Matlab[D].Tianjin:Hebei University of Technology,2013.
[2] 于盛.汽车被动悬架的平顺性分析与优化设计[D].长沙:湖南大学,2014.
YU S.Interval uncertain optimization of vehicle suspension for ride comfort[D].Changsha:Hunan University,2014.
[3] NARIMAN-ZADEH N,SALEHPOUR M,JAMALI A,et al.Pareto optimi-zation of a five-degree of freedom vehicle vibration model using a multi-objective uniform-diversity genetic algorithm[J].Engineering Applications of Artificial Intelligence,2010,23(4):544-549.
[4] 王瑞.基于ADAMS与MATLAB的汽车半主动悬架系统的建模及仿真[D].西安:西安工业大学,2014.
WANG R. Modeling and simulation on vehicle semi-active suspension based on ADAMS and MATLAB[D].Xian:Xian University of Technology,2014.
[5] MICHAELA J,GERDTSA M.Pro-active optimal control for semi-active vehicle suspension based on sensitiveity updates[J].Vehicle System Dynamics,2015, 53(12):1723-1738.
[6] 蒋培露.车辆主动悬架的控制与仿真研究[D].上海:上海工程技术大学,2015.
JIANG P L.Research on control and simulation of vehicle active suspension[D].Shanghai:Shanghai University of Engineering Science,2015.
[7] DANGOR M,OLUROTIMI A D,JIMOH O P,et al.Evolutionary algorithm-based PID controller tuning for nonlinear quarter-car electrohydraulic vehicle suspens ions[J].Nonlinear Dynamics,2014,78(4):2797-2805.[8] MORTEZA M,AFEF F,SENIOR M.Adaptive PID-sliding-mode fault-tolerant control approach for vehicle suspension systems subject to actuator faults[J].IEEE Transactions on Vehicular Technology, 2014,63(3): 1042-1052.
[9] HYUN D C,CHOON K A,MYO T L,et al. Dynamic output-feedbackH∞control for active half-vehicle suspension systems with time-varying input delay[J].International Journal of Control,2016,14(1):60 -67.
[10] HAIPING D,KAM Y S,JAMES L.Semi-activeH∞control of vehicle suspension with magnetorheological dampers[J].Journal of Sound and Vibration,2015,28(3):982 -995.[11] AHMAD M,MEHDI M,SAJJAD A.Non-linear predictive control of multi-input multi-output vehicle suspension system[J].Journal of Low Frequency Noise,2015,34(1):90-104.
[12] MIRKO C,JOSKO D,Josip K,et al.Optimisation of active suspension control inputs for improved vehicle handling performance[J].Vehicle System Dynamics,2016, 54(11):1580-1590.
Multi-objectivecontrolandsimulationofvehicleactivesuspensionbasedonwheelbasepreview
WANGQi1,HERen2
(1.Department of Automotive Engineering,Zhenjiang College,Zhenjiang 212003,Jiangsu,China;2.School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang 212013,Jiangsu,China)
At present,the vehicle travel process is vulnerable to obstruction,resulting in greater vibration,thus affecting the ride comfort.In this regard,this paper adopts the wheelbase preview system to control the fluctuation range of vehicle driving.TheH∞norm and the generalizedH2norm are defined by using the static output feedback design of the wheelbase preview controller.The iterative linear matrix inequality and the cone-complement linearization algorithm are introduced.The four-degree-of-freedom vehicle model is constructed.Describe the stability of the closed-loop control system.The simulation parameters of multi-objective control of vehicle wheel speed preview system are set up and simulated in Matlab/Simulink environment.The simulation results are compared with those of wheelless preview control system.The simulation results show that the acceleration and angular acceleration of the wheelbase preview control system are reduced by 48.6% and 59.3%,respectively,compared with those without the wheelless preview system,and the overall vibration amplitude of the vehicle is obviously reduced.The use of wheel speed preview control vehicle active suspension system,can improve the ride comfort of the vehicle.
wheel speed preview; vehicle active suspension; multi-objective control; simulation
U 463
: A
: 1672-5581(2017)03-0227-05
国家自然科学基金资助项目(51275212);江苏省高等专业院校教师国内高级访问学者计划资助项目(2015FX098)
王 琦(1976—),女,副教授,硕士. E-mail:wangq201704@126.com
