脉冲风洞天平动态标定加载系统设计
2017-09-29高宏力马力翔黄晓蓉西南交通大学机械工程学院成都610031
毛 润,高宏力,马力翔,黄晓蓉(西南交通大学 机械工程学院,成都 610031)
脉冲风洞天平动态标定加载系统设计
毛 润,高宏力,马力翔,黄晓蓉
(西南交通大学 机械工程学院,成都 610031)
由于脉冲风洞试验时间短,冲击载荷大,试验过程有强烈振动,影响天平的测力精度,因此,需要对天平模型进行动态标定.针对风洞天平的动态标定所需要的高频率、重载荷稳定的动态力,设计了一套动态力加载系统.机械结构运用电动机带动丝杠副的结构设计,控制部分采取嵌入式PC,在系统内虚拟出软PLC.传感器检测模块和电动机驱动模块等通过EtherCAT总线与软PLC通讯,实现硬件的模块化集成.经试验测试,该系统能满足风洞天平的测试要求.
风动天平; 动态标定; 嵌入式PLC
风洞天平模型试验是航空航天飞行器研制过程了解飞行器性能、降低飞行器研制风险和成本的重要手段之一.随着社会工业发展,风洞天平模型试验越来越多地运用到汽车、高层建筑的受力测试当中.风洞天平则是直接感应和测量作用在模型6个自由度上气动力、力矩的高精度测量装置.国内外对风洞天平的研究大多数局限在静态形式上,而对于动态力往往是采用“静标动用”的方法进行,即仅依据计量器具静态校准的数据结果作为动态测试的依据.其结果是,在静态校准中精度很高的计量器具,在动态测试中却可能出现高达100%的动态误差[1].对于连续风洞,当试验时间足够长时,模型振动会逐渐衰减,最终测力天平能够给出一个稳定的数值.但对于脉冲风洞(约300 ms),试验时间很短,模型结构振动来不及衰减,测力天平的测量结果会受到很大的影响[2-3].因此,对于脉冲风洞天平的动态校准变得十分重要.动态校准则是在静态校准的基础上,利用标模,在风洞中进一步校验天平性能的过程.一般情况,动态标定所用的力源为标准动态力源,标准动态力有稳定的频谱,可以复制,易于分析[4].
目前,国内外对于风洞天平的动态标定实验中采用的标准力加载机构,大多数采用脉冲式力源、正弦力源、阶跃力源等形式进行加载.这些加载形式的原理、优缺点、应用范围都不相同[5-6].表1为对各种力源装置进行对比.

表1 各种力源装置对比Tab.1 Comparison of each dynamic force equipment
综上所述,这些设计最大的缺陷是不能兼顾各种标准力的输出,通过分析论证,针对这些不足,设计出一套机构实现一系列标准动态力的输出.该机构能实现不同动态力的输出,成本较低,控制方便[7].
1 系统设计
如图1所示,系统是由控制部分和机械部分组成.伺服电动机通过联轴器连接丝杠滑台来推动加载头对待标定的天平进行施力作用.通过对电动机的不同控制来选择施加动态加载力模式,可以施加正弦力、负阶跃力、脉冲力.根据期望的输出力设定电动机转矩,同时根据期望输出力的变化频率设定力矩变化频率,进而达到需要的动态力输出.

图1 系统组成Fig.1 Composition of the system
1.1机械机构部分设计
如图2所示,该机械机构部分是由两个部分组成:电动机丝杠部分和力加载头部分.电动机丝杠部分主要由电动机1、丝杠2、直线导轨3和导轨滑块6组成.力加载头部分主要由加载支架5和标准力传感器4组成.

图2 系统机械结构图Fig.2 Mechanical structure of system
电动机1通过联轴器带动丝杠2转动,丝杠2推动滑块的直线动作,滑块6上面安装了加载头,加载头的顶部就是标准测力传感器4,测力传感器直接作用在天平上面.根据牛顿第三定律可知,标准测力传感器和天平所受的力大小相等,方向相反且作用在同一直线上面,这样就可以根据设计要求,通过控制电动机运动达到控制各种标准动态力输出的目的.
1.2控制部分组成
如图3所示,控制部分分为3部分:控制单元、输入单元和输出单元.控制单元采用BECKHOFF的CX1030嵌入式控制器,AX5000系列伺服驱动器CPU模块,集成式快速控制技术电流控制周期最快可达31.25 μs,支持高速及高动态性定位任务.RS232串口以及具有E-bus接口的电源模块.CX1030后端连接EtherCAT总线,EtherCAT高性能的系统通讯技术能够与基于PC的控制技术理想结合,并支持与其他通讯系统之间的耦合.总线接数字量输入输出模块、传感器信号采集模块和电动机驱动模块等.由于控制器的运算频率1.8 GHz,在控制器操作系统里虚拟一个软PLC,数据采集处理和运动控制均由软PLC完成.
2 PID控制算法设计
PID控制是工业控制中应用最为广泛的控制方法[9].对于脉冲风洞天平的动态标定,要求加载力具有稳定的频谱且可复制,但是因为机械结构的局限加上系统的扰动,严重影响加载系统的可靠性.在电动机的控制中,运用PID控制算法,可有效解决此问题.针对系统的设计要求,需要产生3种方式的动态加载力.各种加载力采用不同的控制算法,正弦加载需要运用电子凸轮,脉冲加载和负阶跃加载则需要运用电动机的力矩模式.图4为系统控制算法流程图,其中ε为根据实际情况人为设定的阀值.
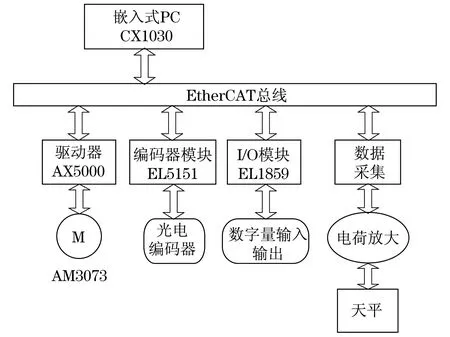
图3 系统控制部分组成图Fig.3 Composition of the control system

图4 控制算法流程图Fig.4 The flow chart of control algorithm
正弦力、脉冲力和阶跃力的控制方式各不相同.正弦力是通过TwinCAT System Manager NC配置凸轮表,将正弦力转化成电动机的力矩控制.负阶跃力输出时,首先电动机寻参后,将电动机转成位置模式带动加载头向前以0.1 m/s的速度运动,当加载头前面的标准力传感器碰到风洞天平机构,产生一个电压信号反馈给PLC后立刻做出指令,使电动机转成转矩模式.根据匀速状态下电机丝杠转矩和轴向力估算公式为

考虑10%的余量,给电动机设置的扭矩1.1Ta,此时加载头和天平贴合,电动机堵转t时间即可产生负阶跃力.若需要产生脉冲力,当标准力传感器达到所需力值Fa时,电动机反转回原点.这个过程完成了脉冲力的输出.
3 结果分析
试验对象是天平动态标定试验台,通过对试验台的加载动作进行控制,来完成上述算法.编程硬件平台选用德国倍福公司的工业PC-C6920,软件平台为TwinCAT3.0,该平台支持Matlab编程.选取正弦加载方式在该平台进行试验,通过数据整定PID参数.试验效果如图5所示.
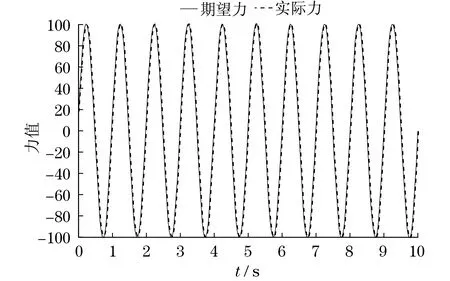
图5 正弦力加载效果图Fig.5 The performance of sine wave force
为了更加直观地说明控制效果,对系统跟踪误差的均方根误差(RMSE)进行测量计算:

式中:r为RMSE.结果说明,该算法能较好地实现施加力的控制,
4 结语
本文将嵌入式PLC应用在标准动态力加载机构上,实现了对传感器数据的采集分析.与传统力源装置相比,该系统所采用的PC+现场总线+分布式I/O的体系结构,使系统硬件结构更简单,控制方便,力输出形式丰富.系统程序鲁棒性较好,不同功能的程序在软PLC里划分为单独的任务执行,实现软件结构的模块化.对发展和完善动态力值计量技术有着其重要的意义.标准动态力发生装置是动态力值计量技术的最终反映.为了充分掌握动态力传感器,尤其是大力值宽频带的动态力传感器的动态特性,研制大力值宽频带的标准动态力发生装置具有重要的意义.
[1] 何闻.标准动态力发生装置国内外研究现状[J].机电工程,1999(2):47-49.
HE W.The research status of standard dynamic force measurement systems[J].Mechatronics Engineering,1999(2):47-49.
[2] 吕金洲,张小庆,高宏力,等.脉冲燃烧风洞测力天平动力学建模与分析[J].噪声与振动控制,2015(1):182-186.
LÜ J Z,ZHANG X Q,GAO H L,et al.Structural dynamics modeling and analysis of the force balance for an impulse combustion wind tunnel[J].Noise and Vibration Control,2015(1):182-186.
[3] 张小庆,乐嘉陵,许明恒.超声速脉冲风洞起动过程数值模拟[J].西南交通大学学报,2008(6):751-755.
ZHANG X Q,LE J L,XU M H.Numerical simulation of starting process of supersonic pulse wind tunnel[J].Journal of Southwest Jiaotong University,2008(6):751-755.
[4] KUMME R,DIXON M J.The results of comparisons between two different dynamic force measurement systems[J].Measurement,1992,10(3):140-144.
[5] Ling Dynamic Systems Ltd.Air-cooled vibration testing systems[R].1994.
[6] 莫建新,贾叔仕,程耀东.用跌落冲击方法校准压力传感器的局限性[J].计量与测试技术,1993(5):11-14
MO J X,JIA S R,CHENG Y D.The limitation of using drop impact test the pressure sensor[J].Metrology & Measurement Technique,1993(5):11-14.
[7] CROSSWY F L,KALB H T.Investigation of dynamic rocket thrust measurement techniques[R].1967.
[8] 黄钦俊,王效葵,李行善,等.力传感器的动态重复性、线性度与性能改进的研究[J].计量学报,1995,16(1):58-67.
HUANG Q J,WANG X K,LI X S.The research of dynamic repeabilit,linearity and performance improve on pressure sensor[J].Acta Metrologica Sinica,1995,16(1):58-67
[9] 张一文,高宏力,黄晓蓉,等.轮对标定试验台先进PID压力控制的研究和应用[J].机械设计与制造,2015(8):153-155.
ZHANG Y W,GAO H L,HUANG X R,et al.Research and application for hydraulic loading in wheel load calibration test-bed based on advanced PID[J].Machinery Design & Manufacture,2015(8):153-155.
[10] 杨智,朱海锋,黄以华.PID控制器设计与参数整定方法综述[J].化工自动化及仪表,2005(5):1-7.
YANG Z,ZHU H F,HUANG Y H.The PID controller design and parameter setting method of review[J].Journal of Chemical Industry Automation and Instrument,2005(5):1-7.
[11] 刘金琨.先进PID 控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
LIU J K.The advanced PID control and MATLAB simulation[M].Beijing:Electronic Industry Press,2003.
Dynamicforcemeasurementsystembasedonwind-tunnelbalance
MAORun,GAOHongli,MALixiang,HUANGXiaorong
(College of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031, China)
Since the short effective measurement time and the large impulsive load for the impulse combustion testing in wind tunnel,model system will vibrate intensively during the experiment,which will reduce the accuracy of force testing.In order to provide the dynamic forces which the experiment needs,we proposed a new dynamic force measurement system.The mechanical part was consist of a set of motor,leading screws and screw nuts.Meanwhile the control part was based on embedded soft PLC.The EtherCAT terminal boxes which are connected to the controller are used for detecting the signals from sensors and driving motors.The modular integrated hardware making the system more compact.Experiment shows that the system meet the requirement of wind-tunnel balance.
wind-tunnel balance; calibration accuracy; embedded PLC
TP 23
: A
: 1672-5581(2017)03-0244-04
毛 润(1990—),男,博士生.E-mail:1101083246@qq.com
