高地隙履带车转向性能试验
2017-09-25王宝山王淼森王万章种东风
王宝山,王淼森,王万章,2,种东风,陈 蒋
(1.河南农业大学机电工程学院,河南 郑州450002; 2.河南粮食作物协同创新中心,河南 郑州 450002)
高地隙履带车转向性能试验
王宝山1,王淼森1,王万章1,2,种东风1,陈 蒋1
(1.河南农业大学机电工程学院,河南 郑州450002; 2.河南粮食作物协同创新中心,河南 郑州 450002)
针对农作物生长后期田间机械化管理作业需求,设计了一种小型全液压驱动的高地隙履带车。履带车采用两侧马达正反转的方式进行原地转向,为验证设计方案的合理性,使用AMEsim软件和集思宝G970高精度GNSS设备对履带车原地转向性能进行仿真分析和试验。仿真结果表明:在水泥路和砖砌路稳定转向时,两侧马达转速分别为-76 r·min-1和81 r·min-1,转速差约为总转速的3.3%,基本可以实现等速正反转。试验结果表明:使用实时差分卫星定位信号可以精确测定履带转向轨迹,在水泥路和砖砌路履带车转向半径均值分别为0.054 m和0.126 m,转向轨迹半径变异系数分别为40.969%和64.899%;圆心距离标准差分别为0.093 m和0.017 m。仿真和履带车试验表明,采用两侧行走马达正反转实现履带车原地转向的方案可行,履带车转向半径较小。
履带车;转向;差分定位;AMEsim
履带车转向性能是整车性能的一项重要指标,目前对履带车转向性能研究主要集中于转向阻力研究,在试验过程中对扭矩、功率、角速度等参数进行测定,分析转向阻力受转向机构型式、路面状况、转向半径大小等因素的影响。李耀明等[1]设计了一种可以实现不同半径转向的新型机械式差逆转向机构,并在水泥和稻田环境中对其扭矩、转速和转向半径进行了试验测定;迟媛等[2-6]对液压机械双流差速机构在不同转向半径、土壤条件、转向系数下的载荷比,以及转向时最大驱动力矩等参数进行了研究;王红岩等[7]在考虑滑转和离心力的条件下,对高速履带车辆各运动学和动力学参数进行了分析,并与传统理论结果进行了对比;荆崇波等[8]对液压差速转向机构的工作原理进行了介绍,并对履带车辆转向特性台架试验的实现方法进行了研究;孙逢春等[9]对履带车辆斜坡转向时的接地比压随各参数的变化情况进行了研究;鲁植雄等[10]、杨磊等[11]、曹付义等[12]对液压转向系统的控制方法、转向性能仿真和转向系统参数优化进行了研究;芮强等[13]使用数字罗盘、GPS等设备对履带车辆在差速大半径转向时的轨迹进行了测量。针对履带车转向过程的研究主要是针对非原地转向过程中转向阻力和运动参数的研究,对原地转向及转向轨迹的研究较少[14-15]。目前,转向机构主要是液压机械双流差速机构和纯机械的转向机构,其中液压机械双流差速机构可以实现各种转向半径下的无极变速转向,转向适应能力强,但结构较复杂、成本较高。本研究设计的全液压驱动履带车,无差速器、转向器和驱动桥等机械结构,完全依靠液压系统实现转向,结构紧凑、操作方便、成本较低,为验证液压转向系统设计的可行性和实际转向效果,对转向过程进行了仿真和试验研究。
1 履带车结构与工作原理
履带车采用高地隙车架结构,发动机、液压油箱、蓄电池等设置于两侧履带总成上方车架(图1)。履带车的结构尺寸参照烟草和玉米种植农艺要求确定,两侧履带中心距1 200 mm,两侧车架最大宽度低于450 mm,中间车架最大通过高度1 800 mm;履带车采用无线遥控器操作,可在100 m范围内遥控电磁阀,控制履带车的行走、转向和作业机具的启停。
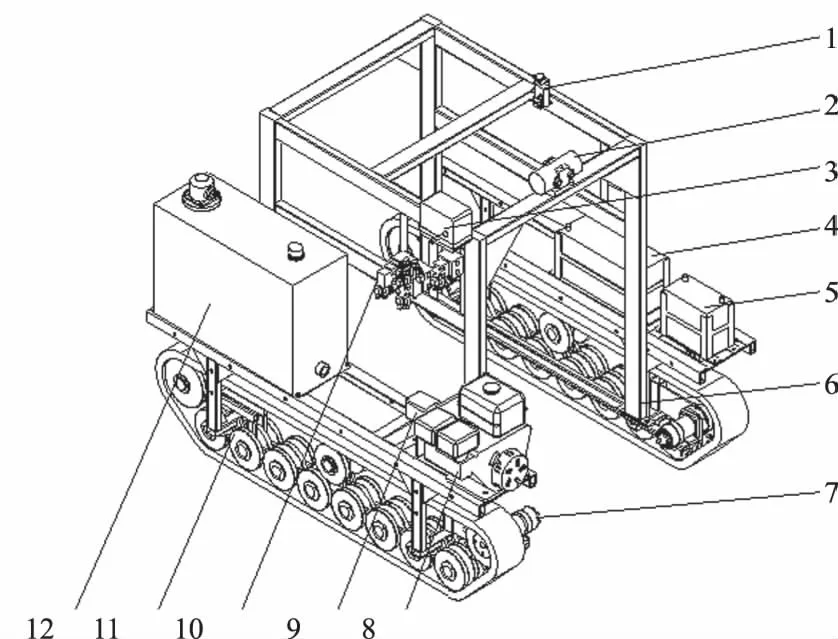
1.手动溢流阀;2.分流集流阀;3.遥控接收器;4.启动蓄电池;5.电磁阀蓄电池;6.车架;7.液压马达;8.发动机;9.液压泵;10.液压阀块总成;11.履带总成;12.液压油箱。
1.Manual hydraulic relief valve; 2.Dividing-combining valve; 3.Remote signal receiver; 4.Starting storage battery; 5.Solenoid valve battery; 6.Frame; 7.Hydraulic motor; 8.Engine; 9.Hydraulic pump; 10.Hydraulic valve block assembly; 11.Track assembly; 12.Hydraulic tank.
图1履带车的结构
Fig.1Sketchmapofthetrackedvehicle
2 液压系统的设计
2.1液压系统原理
汽油机经联轴器带动液压泵,液压油经电磁阀带动行走液压马达和作业机具液压缸(图2)。三位四通电磁阀控制履带车前进、后退和急停,调速阀控制履带车行进速度,分流集流阀可以提高履带车行驶的直线性。行进过程中需要转向时,遥控其中一个二位四通电磁阀使对应侧液压马达反转;可通过控制电磁阀连续通电时间,实现履带车原地转向和小角度转向。常闭型电磁溢流阀,未通电时作为普通的溢流阀使用,限定液压系统最大压力,遥控电磁溢流阀通电时实现系统卸荷;单向阀和手动溢流阀用于减轻履带车急停和转向时的液压冲击。
2.2行走阻力计算
根据仿真参数的需要,对履带车转向过程中两侧履带的阻力和履带驱动马达扭矩进行计算。计算过程中考虑履带车重心偏移量的影响,由于试验时履带车理论速度仅为0.75 m·s-1,可忽略离心力对履带车牵引力的影响[7];同时为简化计算过程,忽略滑转、滑移和车辆转动惯量对两侧履带受力的影响,并假设单侧履带上各点所受地面支持力相同。根据实际测定的履带车各零部件质量,使用SolidWorks建立履带车三维模型,评估得出履带车重心高度、横向和纵向偏移量分别为583.3 mm、115.7 mm和4.9 mm。纵向偏移量较小,仅考虑横向偏移量对两侧履带所受地面支持力的影响。

1.液压油箱;2.液压泵;3.调速阀;4.三位四通电磁阀;5.液压缸;6.分流集流阀;7. 二位四通电磁阀;8.单向阀;9.液压马达;10.手动溢流阀;11.电磁溢流阀。
1.Hydraulic tank; 2.Hydraulic pump; 3.Speed control valve; 4.3 position 4 port hydraulic valve; 5.Hydraulic cylinder; 6.Dividing-combining valve; 7.2 position 4 port hydraulic valve; 8. Check valve; 9. Hydraulic motor; 10.Manual hydraulic relief valve; 11.Signal operated hydraulic relief valve.
图2液压系统原理图
Fig.2Schematicdiagramofhydraulicsystem
(1)
FN1+FN2=m×g
(2)
式中:FN1为左侧履带受地面支持力,N;FN2为右侧履带受地面支持力,N;e为重心横向偏移距离, 取值为115.7 mm;B为履带中心距, 取值为1 200 mm;m为履带车质量, 取值为500 kg;g为重力加速度,取值为9.8 m·s-2。将以上参数代入公式(1)、(2)求得FN1、FN2分别为1 977.56、2 922.44 N。
(3)
式中:Fi为原地转向时内外侧履带所受总阻力,N;i取1和2时分别对应左侧和右侧履带;f为滚动阻力系数, 取值为0.05;L为履带接地长度,取值为1 500 mm;μmax为单边制动时转向阻力系数,水泥路面和砖砌路面转向阻力系数μmax分别取值0.6和0.7,将FN1、FN2、f、μmax代入公式(3)计算得出,水泥路面转向时左侧和右侧履带阻力分别为-1 179.76 N和1 227.00 N;砖砌路面转向时左侧和右侧履带阻力分别为-1 359.91 N和1 407.15 N。

(4)
式中:M为液压马达理论扭矩,N·m;R为驱动轮半径,取值为0.095 m;η1为液压马达机械效率, 取值为0.9;η2为履带行走机构效率, 取值为0.7。将R、η1、η2及公示(3)计算所得的阻力值代入公式(4)计算得出,水泥路面转向时左侧和右侧履带扭矩值分别为-177.90 N·m和185.02 N·m;砖砌路面转向时左侧和右侧履带扭矩值分别为-205.06 N·m和212.19 N·m。
3 液压系统仿真
使用AMEsim软件建立液压系统仿真模型(图3)。由于在原地转向过程中,图2中的调速阀、液压缸及与控制液压缸的三位四通电磁阀未工作,为简化仿真过程,仿真模型中未包含以上3个液压元件。

1.动力源;2.液压泵;3.电磁溢流阀;4.信号控制器;5.三位四通电磁阀;6.单向阀;7.液压马达;8. 二位四通电磁阀;9.液压油源;10.扭矩发生器;11.旋转负载;12.手动溢流阀;13.分流集流阀。1.Power source; 2.Hydraulic pump; 3.Signal operated hydraulic relief valve; 4.Signal controller; 5.3 position 4 port hydraulic valve; 6.Check valve; 7.Hydraulic motor; 8.2 position 4 port hydraulic valve; 9.Hydraulic oil source;10.Rotary friction torque generator; 11.Rotary load; 12.Manual hydraulic relief valve; 13.Dividing-combining valve.
图3液压系统仿真模型
Fig.3Simulationmodelofhydraulicsystem
理想状态下,以履带车设计车速原地转向一周所需时间为5 s,当转向信号持续时间大于5 s时,履带车原地转向;考虑到实际中存在滑转、滑移,同时为了解仿真过程中转速稳定所需时间,将仿真时间设定为10 s,在仿真全过程中施加转向信号。仿真系统中使用HM46液压油,液压泵排量为14 mL·r-1,转速为1 800 r·min-1,液压马达排量为160 mL·r-1,溢流阀调定压力为16 MPa。
仿真结果如图4所示。由仿真结果可知,在水泥路和砖砌路原地转向时,左侧马达转速分别为80.91、80.96 r·min-1,右侧马达转速分别为75.70、75.75 r·min-1。两种地面状况,转速稳定时同一侧马达转速差不大于0.05 r·min-1;同一种地面状况时,两侧马达转速差均为5.21 r·min-1,转速差约为总转速的3.3%。分析可知,不同工况时同一马达转速变化较小,说明转向过程分流集流阀两出油口流量受负载大小影响较小,分流效果稳定;同一工况中两侧马达转速差较大的原因在于液压系统流量较小,仅为所选分流集流阀额定流量的50.4%,由分流集流阀工作特性知,实际流量与额定流量比值越小分流精度越低,补充仿真发现当系统流量达到分流集流阀额定流量的80%时,两侧马达转速差为总转速的1.1%。因此,选用更大排量的液压泵或者选用更小流量的分流集流阀,有利于提高转向过程中履带车两侧液压马达的同步性。

(a)水泥路原地转向两侧马达转速仿真; (b) 砖砌路原地转向两侧马达转速仿真。 (a) Pivot steering speed simulation of two motors on cement road; (b) Pivot steering speed simulation of two motors on brick road.
4 履带车原地转向试验
在河南农业大学机电工程学院实习工厂内水泥地面和砖砌地面进行原地转向性能试验。试验设备:集思宝G970高精度GNSS设备、蓝牙模块、笔记本电脑。集思宝G970系统包含移动站、基准站,能够提供经实时差分的厘米级定位信息。试验方法:为保证采集到足够信息点,将G970系统采样频率设置为最大值5 Hz。试验时移动站安装在履带车上,经蓝牙模块与计算机上的串口调试软件建立通信,使用串口调试软件记录轨迹信息;后期对轨迹信息中经纬度信息进行提取,经高斯投影正算公式换算和整理,使用Mathematica拟合转向圆轨迹,拟合圆半径为移动站相位中心到转向轨迹圆心的距离[16]。移动站安装位置、履带车试验过程如图5所示,图5(a)中O、O1、O2分别为履带车接地面几何中心、履带车质量中心及移动站相位中心,相位中心距几何中心距离a、b分别为0.568 m、0.436 m,相位中心距地高度1.644 m。由于移动站安装高度较高以及车辆运行过程中振动较大,为验证定位精度,首先在怠速条件下进行静态点的采集,共计采集111个数据点,解析发现数据点全部分布在直径为2 cm的圆内,测定精度较高,可以满足试验要求。履带车接地面几何中心转向轨迹半径与移动站相位中心转向轨迹半径之间关系如公式(5)所示。
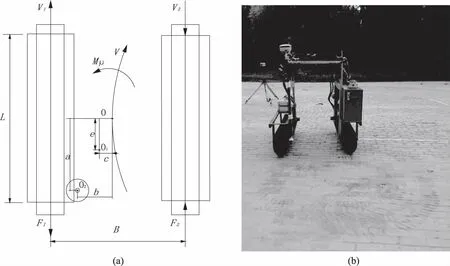
(a) 移动站安装示意图;(b)履带车原地转向试验。 (a) Schematic diagram of the installation of mobile station;(b)Pivot steering test of tracked vehicle.

(5)
式中:a为移动站相位中心与履带车接地面几何中心纵向距离,为0.568 m;b为移动站相位中心与履带车接地面几何中心横向距离,为0.436 m。
履带车在水泥路和砖砌路原地转向轨迹如图6所示,由图6可知,水泥路转向时车辆滑移明显,砖砌路则无明显滑移。
转向圆轨迹参数如表1所示,可知履带车几何中心转向轨迹半径平均值分别为0.054 m和0.126 m,转向半径较小,履带车能够很好地实现原地转向;与砖砌路相比,在水泥路上履带车原地转向时转向半径更小且半径值更稳定,但转向轨迹圆心滑移程度更大。

(a) 水泥原地转向轨迹;(b) 砖砌路原地转向轨迹。 (a) Turning track on cement road;(b) Turning track on brick road.

表1 履带车转向轨迹参数Table 1 Turning parameters of tracked vehicle
5 结论
1)履带车采用两侧驱动马达正反转实现原地转向的方案可行,在水泥和砖砌地面原地转向时分流集流阀能够较好地实现等量分流,两侧马达转速差约为总转速的3.3%;可采用适当提高液压系统实际流量的方法进一步提高两侧马达转速的一致性。
2)使用实时差分的卫星定位信号记录履带车转向轨迹的方案可行,测定精度可以达到2 cm;借助Mathematica数据分析软件进行后处理,可以方便地确定转向轨迹圆心和半径。
3)相比于砖砌路,在水泥路上履带车原地转向半径值更小且更稳定,但圆心偏移程度更大。
[1] 李耀明,陈劲松,梁振伟,等.履带式联合收获机差逆转向机构设计与试验[J].农业机械学报,2016,47(7):127-134.
[2] 迟媛,蒋恩臣.差速转向履带车辆的载荷比试验[J].农业机械学报,2008,39(8):44-48.
[3] 迟媛,石丹丹,王洪涛,等.松软地面履带车辆差速转向实际载荷比的研究[J].农业工程学报,2014,30(21):32-39.
[4] 迟媛,蒋恩臣.履带车辆差速式转向机构性能试验[J].农业机械学报,2008,39(7):14-17.
[5] 迟媛.动力差速转向机构履带车辆载荷比与转向系数的关系[J].农业工程学报,2012,28(18):44-48.
[6] 迟媛,蒋恩臣.履带车辆转向时最大驱动力矩的计算[J].农业工程学报,2009,25(3):74-80.
[7] 王红岩,王钦龙,芮强,等.高速履带车辆转向过程分析与试验验证[J].机械工程学报,2014,50(16):162-172.
[8] 荆崇波,魏超,李雪原,等.履带车辆差速转向机构转向过程动态特性的试验方法[J].农业工程学报,2009,25(7):62-68.
[9] 孙逢春,史青录,翟丽,等.履带式车辆接地比压在斜坡转向时的变化分析[J].农业机械学报,2006,37(5):14-18.
[10] 鲁植雄,龚佳慧,鲁杨,等.拖拉机线控液压转向系统的双通道PID控制仿真与试验[J].农业工程学报,2016,32(6):102-107.
[11] 杨磊,马彪,李和言,等.静液驱动履带车辆差速与独立转向性能仿真研究1[J].中国机械工程,2010,21(5):624-629.
[12] 曹付义,周志立,徐立友.履带车辆液压机械差速转向系统参数优化[J].农业工程学报,2013,29(18):60-66.
[13] 芮强,王红岩,王钦龙,等.履带车辆转向性能参数分析与试验研究[J].机械工程学报,2015,51(12):127-136.
[14] 陈世教.履带式液压挖掘机原地转弯阻力计算[J].建筑机械,1998(4):6-9.
[15] 宋海军,高连华,程军伟.履带车辆中心转向模型研究[J].装甲兵工程学院学报,2007,21(2):55-58.
[16] 徐国旺,廖明潮.拟合圆的几种方法[J].武汉工业学院学报,2002,26(4):104-107.
(责任编辑:蒋国良)
Steeringperformancetestofhighclearancetrackedvehicle
WANG Baoshan1, WANG Miaosen1, WANG Wanzhang1,2, CHONG Dongfeng1, CHEN Jiang1
(1.College of Mechanical and Electrical Engineering, Henan Agricultural University, Zhengzhou 450002, China; 2.Collaborative Innovation Center of Henan Grain Crops, Zhengzhou 450002, China)
A small high clearance tracked vehicle with remote control and full hydraulic drive was designed.It was designed to complete the agricultural mechanization management in the later growth stage of crops. Pivot steering of the vehicle used the way of positive inversion of two hydraulic motors. In order to verify whether the pivot steering design scheme was reasonable, AMEsim software and Unistrong’s G970 Multi-frequency GNSS system were used to do the simulation analysis and prototype test. The simulation results showed that the left motor speed was about -76 r·min-1and the right motor speed was about 81 r·min-1on both the cement road and brick road. Speed difference was about 3.3% of the total speed, which could basically achieve the equal speed positive inversion. The prototype experiment showed that the pivot steering trajectories of the vehicle could be accurately determined by using the real-time differential satellite positioning signal.The radii of the pivot steering trajectories were 0.054 m and 0.126 m respectively in cement road and brick road.The coefficients of variation of radii were 40.969% and 64.899% respectively.The standard deviations of center distance were 0.093 m and 0.017 m respectively. The simulation and prototype test showed that it was feasible to use the way of positive inversion of two hydraulic motors to achieve pivot steering, and the steering radius was small.
tracked vehicle; steering; differential positioning; AMEsim
S224.4
:A
2016-10-11
河南省现代农业产业技术体系玉米全程机械化岗位专项(S10-02-G07/2016);河南省烟草公司科技专项(HYKJ1206/2016)
王宝山(1992-),男,河南沈丘人,硕士研究生,主要从事新型农业机械设计与性能试验。
王万章(1963-),男,河南孟津人,教授,博士生导师。
1000-2340(2017)03-0335-06
