无人驾驶车
2017-09-23周卓朱秀军兰旭婷
周卓+朱秀军+兰旭婷


摘 要:利用红外避障传感器检测障碍物,为并以STC89C52单片机控制芯片控制小汽车的速度及转向,从而实现自动避障的功能。其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM控制。
关键词:智能小车 STC89C52单片机 L298N 红外避障传感器
由西北民族大学电气工程学院"双E"项目资助(项目编号:20161829 )
一、绪论
立足经济科技高速发展的时代,高效率的工作、生活是大家共同追求的。自1956年人工智能诞生起,几十年的发展让其有了许多的进步,并广泛用于机器 视觉,专家系统,智能搜索,定理证明,博弈,自动程序设计,智能控制,机器人学等各大领域,并且与人类生活联系越来越紧密。甚至连烤面包机也即将加入人工智能革命。你可以将一个面包放进去,用智能手机拍张照片,手机将把所有需要的信息传送给烤面包机,指导它如何将面包烤得恰到好处。从某些方面说,人工智能几乎无处不在,从控制数码相机的光圈和快门速度的智能感应器,到干衣机中的温度和湿度探测器,再到汽车中的自动泊车功能。更复杂的应用还在源源不断地走出实验室。
今天我们为什么要做一个红外避障车呢?经调查发现,在进行隧道及管道检测时95%以上都会选择人工,很少会用到机械类来进行检测。但是使用无人驾驶车代替人工来进行检测,就可以轻而易举地降低危险度,还能节约大量时间和资金投入。对一些运输企业来说,红外避障车加以改进就是一台很好的运输设备,它能给整个社会的运输业带来的便利不容忽视。
二、方案设计
红外避障车能够将信号采集,信号处理,命令执行,避障功能集为一体,使整个系统的稳定性达到了比较高的水平。
实施目标:
1.手动模式:通过蓝牙模块进行通信,遥控操作实现小汽车的前进、后退、左转、右转;
2.自动模式:实现小汽车的自动检测障碍物,进行避障;
(一)避障模块
小车避障原理是小车上电直走,当发现前方有障碍物的时候转弯继续前进,如此往复。在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向前方发射红外光,当红外距离传感器没有遇到障碍物时为关断状态;如果遇到障碍物则闭合。(电路图如图1)
市面上有很多红外传感器,在这里我选用常用的2~80cm可调距离的避障传感器(如图2)
(二)主控系统
选定了STC89C52单片机作为本设计的主控装置,51系列单片机具有功能强大的位操作指令,I/O口均可按位寻址,程序空间多达8K,对于本设计也绰绰有余,更可贵的是STC89C52单片机价格非常低廉。
(三)电机驱动模块
选用L298N电机驱动板模块,L298N是一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A,额定功率25W。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制。具有驱动能力强,发热量低,抗干扰能力强的特点。
三、硬件设计
(一)信号检测模块
信号检测模块采用红外距离传感器,该传感器为距离可调传感器(可调范围2~80cm),可以精确的调整避障距离范围。蓝牙转串口模块可以轻松实现串口数据无线透传。
(二)总体设计
将红外避障分别装在车体前方的左中右三侧。当车身左侧的传感器检测到障碍物时,主控芯片控制右轮电机反转,车向右偏转;当车身右侧传感器检测到障碍物时,主控芯片控制左轮电机反转,车向左偏转;当车身中間的传感器检测到障碍物时,主控芯片控制左右轮电机同时反转,再进行左转或右转,躲避障碍物。
四、软件设计
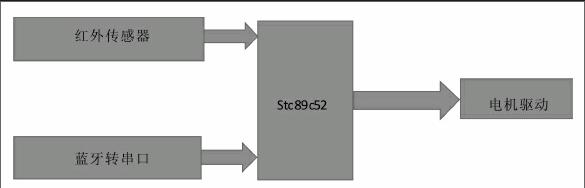
(一)总体结构框图
五、安装和调试
采用螺丝将红外避障传感器及电机等安装组合成车体。通过改变红外避障传感器可调电位器的大小来改变感应距离,通过改变延时程序来改变速度的大小。
结束语:
整个系统的设计以单片机为核心,利用了红外避障传感器,蓝牙串口无线透传模块将软件和硬件相结合。本系统能实现如下功能:自动躲避障碍物,并继续前进。从运行情况来看避障效果比较好,但小车偶尔遇到死角,我认为是由于红外距离传感器的数量太少了。我相信条件允许下我肯定能解决这一问题。
通过本次设计我掌握了很多以前不熟练的东西,认识了很多以前不熟悉得东西,使我在人生上又进了一步。也认识到很多的不足。
参考文献:
[1]郭天祥.51单片机C语言教程 [M]. 北京:电子工业出版社
[2]李朝青.单片机原理及接口技术 [M]. 北京:北京航空航天大学出版社
