适用于主动式半捷联的伺服电机多级控制调速方法*
2017-09-22李文豪杨文卿刘一鸣
李文豪,李 杰,杨文卿,刘一鸣,刘 伟
(中北大学仪器科学与动态测试教育部重点实验室,太原 030051)
适用于主动式半捷联的伺服电机多级控制调速方法*
李文豪,李 杰*,杨文卿,刘一鸣,刘 伟
(中北大学仪器科学与动态测试教育部重点实验室,太原 030051)
针对现有捷联式惯性测量技术存在的被测载体在高自旋运动环境下姿态测量精度低的问题,提出了半捷联惯性测量的概念、原理和主动式半捷联惯性测量的实现方法,同时针对主动式半捷联惯性测量系统中对电机转速较高的控制要求,提出了适用于伺服电机速度调节的多级控制策略。通过测速陀螺输出补偿系统、转速复合测量系统、智能修改PID参数系统、高动态响应电机驱动执行系统等具体控制方法的实施,实现了对电机转速的精确控制,有效地抑制了被测载体高自旋对惯性系统姿态测量精度的影响,具有一定的工程应用价值。
惯性测量;半捷联;多级控制;高自旋
为了实现常规弹药的制导化和精确打击,弹体的姿态获取是其中的关键。基于MEMS器件体积小、成本低、抗高过载等优势,是当前弹药惯性测量系统的首选器件。与此同时,常规弹药在发射后基本处于高旋状态,且目前MEMS器件精度较低,这严重的制约了现有的捷联式MEMS惯性测量方法高精度地测量高速旋转弹药飞行姿态[1-3]。
为了有效解决这一问题,半捷联惯性测量系统应运而生,其核心思想是建立一个不随弹体轴向高旋的“隔转止旋”平台,实现滚转角测量系统与弹体在轴向隔离、径向捷联的安装模式,使测量系统沿弹体轴向实际敏感的角速率远小于弹体轴向转速,确保微机械惯性器件的精度与量程匹配,解决微机械惯性系统在旋转弹上应用时的跨量程测量难题[4-5]。
本文首先介绍主动半捷联惯性系统的工作原理,然后针对系统中的电机控制环节,提出伺服电机速度调节的多级控制方法,并对每个控制方法进行了详细分析说明,最后通过飞行仿真转台试验来验证电机多级控制方法的有效性。
1 系统工作原理
主动式半捷联惯性测量系统的结构如图1所示。

图1 主动式半捷联惯性测量系统原理图
图1中,MIMU安装筒内安装了MIMU(微惯性测量单元),MIMU由3个MEMS加速度计和3个MEMS陀螺构成,能够实时输出其敏感到的载体加速度信息和角速度信息。本系统中加速度计选用的是SD公司的Model1221,量程为±2 g,噪声5 μg/√Hz,内置温度传感器,5 V供电,功耗仅为8 mA。陀螺仪使用的是ADI公司的ADXRS300,量程为±300 °/s,2 kHz带宽,24 °/hr漂移、低宽带噪声[6]。无刷直流电机安装有14线绝对式磁编码器,即磁编码器的每一位对应的角度为360 °/214,所以其可以准确反馈电机的位置。电机本体与弹体固联,当弹体高速旋转时,电机本体随着弹体一起旋转,与此同时电机轴提供与弹体大小相等方向相反的旋转,保证MIMU安装筒在弹体轴向上横滚角速率很低,这样就可以借助低量程高精度的MEMS惯性器件进行相关姿态信息的测量[7]。
2 多级控制调速方法
常规弹药在发射和飞行过程中的情况比较复杂。由于发射过程中过载很大,并且飞行过程中又伴随着弹体的高自旋,因此,如何在这样的环境中保证实时准确地测量弹体的转速并将此信号准确传递给电机,使其以同样大小的速度进行反转是控制的核心问题。
2.1 测速陀螺输出补偿系统
主动半捷联惯性测量系统中的测速系统由安装于弹体轴向的大量程陀螺、安装于惯性测量单元轴向的小量程陀螺和驱动控制系统中的高速ADC采集电路构成。因为系统的安装误差以及高过载条件下所产生的加速度效应误差会对陀螺仪输出造成严重影响,所以要对以上两部分误差进行补偿[8]。
根据陀螺仪输出特性,由于陀螺仪的噪声误差平均值接近于0,可以忽略,在此基础上建立的MIMU中陀螺仪输出数学模型如下:
式中:Uwi为i轴MEMS陀螺仪输出电压(V),Uwi0为i轴MEMS陀螺仪零位输出电压(V),kii为i轴MEMS陀螺标度因数(V/(°/s)),kij为i轴MEMS陀螺仪j轴向安装误差系数(V/(°/s)),wi为MIMU绕i轴转动时MEMS陀螺仪输出的角速度(°/s),gij为g值敏感项(V/g),ai为MIMU中i轴MEMS加速度计输出的加速度(g),其中i=x,y,z;j=x,y,z[9-10]。
根据上式求出MEMS陀螺仪输出零位Uωi0、标度因数kii和安装误差系数kij后,进一步可求得安装误差角θij,通过高精度离心机标定可以得到g值敏感项参数。将上式进行变换并求解标度因数矩阵逆矩阵,得到:
这样用补偿后的角速率乘以标度因数就得准确反映弹体转速的电压值。即:
Uωx=kxx·ωx+Uωx0
小量程陀螺的补偿原理同上。这样就可以使用准确的陀螺输出值进行控制,达到准确输出控制信号的目的。

图2 大量程陀螺安装误差补偿前后数据对比图
在转台准确提供500 °/s的转速时,大量程陀螺的输出数据在补偿前和补偿后对比如图2所示。
由图2数据和计算可以得出,在补偿前,大量程陀螺的安装误差为1.25°,补偿后为0.885°,安装误差得到了很大的提高,且可以明显的看出,在补偿后陀螺的输出数据更加接近转台提供的转速。
2.2 转速复合测量系统
该系统由无刷直流伺服电机作为动力输出装置,采用PWM波的频率对转速进行精确控制。为达到提供稳定测试环境的目的,采用了大量程陀螺-小量程陀螺的复合测量方式。其工作的流程图如图3所示。
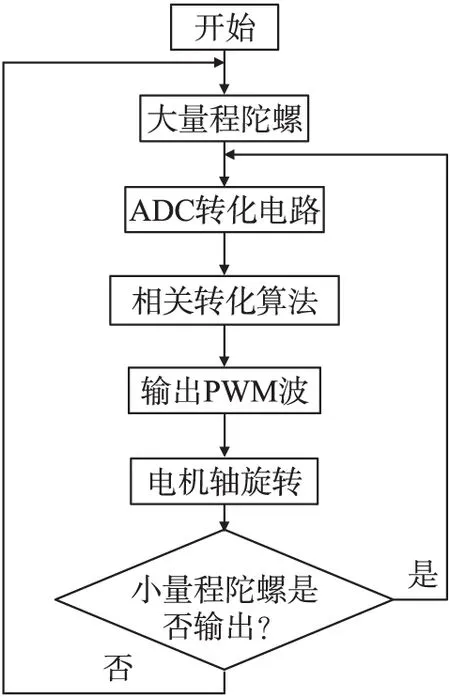
图3 转速复合测量-转速误差补偿流程图
高速ADC采集电路由TI公司的高速DSP TMS320F2812作为核心控制器,控制16位6通道高速同步模数转换芯片ADS8365采集大量程陀螺的输出电压[11]。该模数转换芯片可精确采集并转换为0~5 V电压,转化后的每一位电压值为5/216V,通过转化后输出对应频率的PWM波来控制电机的转速[12]。由于大量程陀螺精度太低,因此电机输出的转速和弹体的转速会有一定差值,此时MIMU安装筒会进行微旋运动,利用MIMU安装筒内的小量程陀螺的输出数据进行复合测量。小量程陀螺的输出值通过转换到对应频率的PWM波,最终达到MIMU安装筒处于稳定测试环境的目的。
设采集电路陀螺输出电压值转化后的数值为data1;Vpbit为每一位data1代表的电压值;大量程陀螺的标度因数为K大;则根据以上各物理量的意义,可以得到:

(1)
Wpbit为每一位data1代表的转速值;因此有:
W=data×Wpbit
(2)
W为转速;由
θ=W×T
(3)
θ为T时间内电机轴转过的角,根据比例关系可以得出:
Pul=(214×θ)/360
(4)
Pul为T时间内控制量应该给出的脉冲数,则控制器应该输出的PWM波的频率为:

(5)
将以上各式代入式(5)并整理得:
f=(214×Vpbit×data1)/(360×K大)
(6)
2.3 智能修改PID参数系统
随着伺服电机运行环境和负载的不同,伺服运动性能也会有所变化,如果驱动器的参数设置不合适,电机会出现强烈抖动和“爬行“现象,这将直接影响系统的正常工作[13]。应用于本系统的伺服电机驱动器,用户可以实时修改伺服驱动器的运行参数、调整伺服系统运行特性,保证电机以最优和最平稳的状态运行。RS232口在伺服驱动器上电以后自动处于激活状态,选择RS232工作命令为输入模式后,就可以通过RS232口读写驱动器的参数和状态[14]。
主动式半捷联惯性测量系统在工作过程中,此处以常规弹药中的火箭弹为例,从发射到飞行再到着地,各个过程中的飞行状态各不相同,为保证电机的转速实时平稳以便适应各个过程,需要在整个飞行过程中针对不同的情况实时修改驱动器的参数。对于本系统的要求,其中最主要的参数包括主增益、速度增益、转矩滤波常数、积分增益、最大加速度和最大速度:
为保证在使用RS232口时相关参数能准确无误写入,定义通讯数据帧格式如下:
对于每个数据包P,由多字节组成,表示为:P=BnBn-1Bn-2…B1B0,字节长度n+1,Bn为起始字节,B0为结束字节,字节长度随命令不同而不同,数据帧定义如下:
P=起始字节+帧长度+功能码+数据+校验和
其中数据帧中各个数据对应的字节长度如表1所示。

表1 名称及字节长度对应表
每帧数据的起始字节Bn的格式为:0XXXXXXX,最高位总是零;其他字节的格式为:1XXXXXXX,最高位总为1,X表示可以为0或1。因此通过判断数据字节的最高位是否为零即可确认一帧数据的开始[15]。Bn-1字节用来表示本帧数据的字节长度及功能代码。
Bn-1=1 b6 b5 b4 b3 b2 b1 b0
b6 b5由00变到11分别代表数据帧的长度为4 byte、5 byte、6 byte和7 byte。b4~b0代表功能码,不同的功能码代表设置不同的参数。对于主增益、速度增益、转矩滤波常数、积分增益、最大加速度和最大速度,其对应的功能码分别是0x10、0x11、0x12、0x13、0x14和0x15。设置完功能码后的一个字节数据就是对应上述参数的预定设置值,范围为1至127。
Bn-2~B1(n>2)为数据包中的数据。Bn-2为最高字节,B1为最低字节,每个数据字节的最高位恒为1,只有低7位有效。
B0字节为校验和,计算方法如下:
S=Bn+Bn-1+Bn-2+…B1;
B0=0x80+Mod(S,128);
B0=0x80+S-128*[S/128];
B0=128~255。
伺服驱动器接收到主控制器的数据包以后,计算校验和;如果校验和与B0相同,说明数据通讯正确,否则数据传输有错。
系统在发射瞬间,转速由零变到高旋,此时如果直接给电机输入对应转速的频率值,电机会由于超差造成报警甚至是脱机。在这种情况下,除了控制信号要连续给出外,还要进行驱动参数的第1次修改。在转速达到最大值后,弹体转速要保持一段时间,此时的驱动参数与发射瞬间是不同的,需要第2次进行修改;当发动机关闭后,整个弹体的转速减小并伴随着俯仰角的减小,需要第3次进行修改。其对应的参数如表2所示。

表2 弹体运动过程与驱动参数对应表
通过TMS320F2812对采集转化的陀螺仪输出数据进行分析,以此判断弹体的飞行进行到哪个过程,进而通过DSP自带的串口对驱动器参数进行修改,保证在不同的飞行阶段有与其对应的驱动器参数。
2.4 高动态响应驱动电机执行系统
当系统工作在高旋状态下时,弹体的转速通常大于30 r/s,所以要求电机执行系统必须有很高的动态响应速度。经过程序测算,控制程序在采集转化陀螺电压值到输出对应频率的PWM波,总共的时间不大于42 μs,这样的数据更新率足以满足系统的要求。
在控制系统的数据更新率满足要求后,电机执行系统的执行速度也必须达到要求。该执行系统由无刷直流电机机与编码器组合而成,响应速度快,90°位置调整为6 ms,位置控制精度小于0.065°,速度控制精度小于0.1%[16]。
在这样的控制系统和电机执行系统共同作用下,即使弹体工作在大于30 r/s的环境下,高动态响应驱动电机执行系统也能完成调速过程中对响应速度和控制精度的要求。
3 实验验证
为验证主动半捷联惯性测量系统中伺服电机多级控制调速方法有效性和准确性,需要进行高速飞行仿真试验,试验现场如图4所示。在系统安装前,首先对MIMU就行标定,标定所用的是三轴温控转台,通过位置和速率两种模式分别标定MIMU中的加速度计和陀螺仪,将采集到的数据进行曲线拟合,求得加速度计和陀螺仪的零点、标度因数以及系统安装误差角。标定完成后,将传感器的六路输出与采集存储电路连接,随后把整个系统安装于高速飞行仿真转台,分别在是否启用智能PID两种情况下,观察系统在不同转速下MIMU安装筒的减旋效果。如果启用智能调速后,MIMU中X轴(横滚轴)向上的陀螺仪的输出比不启用的情况下波动小,且在零点附近,则证明相应的调速控制方法起到了作用,MIMU安装筒减旋效果良好。

图4 飞行仿真转台试验现场图
地面飞行仿真试验步骤如下:①转台启动后,首先进行初始角设定,默认偏航角为0°,俯仰角设定为45°,滚转角为0°;②对转台进行程序设定,使转台依据以下方式运行:偏航角速率为0°/s,俯仰角速率为-1 °/s从45°到-45°往返匀速变化;横滚角速率由0 °/s快速加速到270 °/s,保持20 s,然后降为0 °/s,保持20 s;③依次设定横滚角速率为390 °/s、570 °/s、720 °/s、1 050 °/s、1 590 °/s、2 100 °/s、3 000 °/s、4 320 °/s、5 700 °/s、8 280 °/s、11 880 °/s,重复步骤②;④转台程序运行完后,通过读数设备读取MIMU采集的数据,并运用MATLAB将数据进行处理。
智能PID控制启用前后,MIMU中X轴向陀螺仪的输出数据分别如图5、图6所示。

图5 不启用智能PID控制MIMU中X轴陀螺数据

图6 启用智能PID控制MIMU中X轴陀螺数据
从图5可以看出,当电机在运动过程中仅使用发射过程的驱动参数时,MIMU安装筒转速波动与系统转速基本成线性关系,MIMU安装筒转速最大时超过了100 °/s,减旋效果一般。图6中可以看出,当电机启用智能PID控制后,系统工作于不同转速下,MIMU安装筒转速保持在5 °/s~10 °/s之间,系统减旋效果良好。从而证明了通过多级调速方法的综合作用,系统能够实现精确地测量弹体的速度并将测量得到的速度准确对应地输出控制信号,进而精确地控制电机进行反转,成功实现在高自旋运动状态下为MEMS惯性测量单元提供稳定测试环境的目的。
4 结论
本文所提出的无刷直流伺服电机多级控制策调速方法,首先建立陀螺仪输出误差模型,通过测速陀螺输出补偿系统获取弹体的准确转速;然后为弥补大量程陀螺分辨率低和控制芯片定点计算精度不高的限制,采用了转速复合测量系统,成功地通过DSP将所测得的转速信息转化为相应的频率控制信号,解决了控制速度和准确性的问题;最后通过三次智能修改PID参数和高动态响应驱动电机执行系统能够确保整个过程PID参数的最优性和控制的实时性。通过高速飞行仿真转台试验,对减旋后MIMU中X轴向陀螺仪的输出数据进行分析处理,验证了系统能够有效达到“隔转止旋”的效果,在高自旋运动状态下为MEMS惯性测量单元提供稳定测试环境,成功地抑制了载体高自旋对MEMS惯性系统姿态测量精度的影响。该系统可广泛应用于各种常规弹药的姿态测量中,为弹药的导航制导提供了基础,具有一定的工程实用价值。
[1] 刘俊,石云波,李杰. 微惯性技术[M]. 北京:电子工业出版社,2005:89-95.
[2] 张成,杨树兴. 一种滚转导弹飞行姿态的获取方法[J]. 北京理工大学学报,2004,24(6):481-485.
[3] 贾正望,郭治. 高速旋转弹的姿态控制系统设计[J]. 火炮发射与控制学报,2011,15(3):88-91.
[4] 李杰,赵诣,刘俊,等. 高旋弹药飞行姿态测量用半捷联MEMS惯性测量装置研究[J]. 兵工学报,2013,34(11):1398-1403.
[5] 李杰,洪惠惠,张文栋. MEMS微惯性测量组合标定技术研究[J]. 传感技术学报,2008,34(21):1169-1173.
[6] 李杰,刘俊. 制导弹药用微惯性测量单元结构设计[J]. 兵工学报,2013,34(6):711-717.
[7] Zhu Rong,Zhou Zhaoying. Calibration of Three-Dimensional Integrated Sensors for Improved System Accuracy[J]. Sensors and Actuators 2006,127(3):340-344.
[8] Li Jie,Liu Jun,Zhang Wendong. MEMS Based Micro Inertial Measurement System[J]. Wseas Transactions on Circuits and Systems,2006,37(5):691-696.
[9] 田晓春,李杰,范玉宝. 一种微惯性测量单元标定补偿方法[J]. 传感技术学报,2012,25(10):1411-1415.
[10] 代金华,张丽杰. 多准则MEMS陀螺随机误差在线建模与实时滤波[J]. 传感技术学报,2016,29(1):75-79.
[11] 孙丽明. TMS320F2812原理及其C语言程序开发[M]. 北京:清华大学出版社,2008:149-194.
[12] 姜丽辉. 小型低成本简易制导火箭弹一维稳定平台控制系统研究[D]. 南京:南京理工大学,2015.
[13] 姚丹丹. 基于动调陀螺的稳定平台控制系统研究[D]. 南京:南京理工大学,2013.
[14] 李绍军. 车载陀螺稳定平台控制系统设计与实现[D]. 南京:南京理工大学,2014.
[15] 王海曼. 双自由度控制平台的设计与研究[D]. 天津:河北工业大学,2011.
[16] 李凤祥,朱伟进. 无刷直流电机双模控制技术研究与应用[J]. 电机与控制学报,2013,17(3):70-75.

李文豪(1991-)男,山东青岛人,现为中北大学在读硕士研究生,主要研究方向为微系统集成及自动控制,947970973@qq.com;

李杰(1976-)男,山西省岚县人,博士,博士生导师,2005年3月毕业于北京理工大学信息科学技术学院,获导航、制导与控制专业工学博士学位,目前的主要研究方向为微系统集成理论与技术、惯性感知与控制技术、组合导航理论、计算几何及智能信息处理等,lijie@nuc.edu.cn。
ServoMotorSpeedControlMethodofMulti-LevelControlStrategyforActiveHalf-Strapdown*
LIWenhao,LIJie*,YANGWenqing,LIUYiming,LIUWei
(Key Laboratory of Instrumentation Science and Dynamic Measurement(North University of China),Ministry of Education,Taiyuan 030051,China)
Aiming at the problem that the measured accuracy of the attitude is low when measured carrier is in the high spin motion environment for the existing strapdown inertial measurement technology,this paper proposes the concept and principle of half-strapdown inertial measurement and the realization of active half-strapdown inertial measurement. At the same time,for high control requirements of motor rotating speed in active half-strapdown inertial measurement system,a multi-level control strategy applied to the servo motor speed is proposed. The precise control of the motor speed is realized by the implementation of the specific control method such as the speed gyro output compensation system,the speed compound measuring system,the intelligent modification PID parameter system and the high dynamic response motor drive execution system. This method can effectively suppresses the influence of the high spin of the measured carrier on the attitude measurement accuracy of the inertial system which has a certain engineering application value.
inertial measurement;half-strapdown;multi-level control;high spin
项目来源:国家自然科学基金项目(51575500)
2017-02-14修改日期:2017-04-05
V249.3
:A
:1004-1699(2017)09-1369-06
10.3969/j.issn.1004-1699.2017.09.012
