喷水推进式无人船总体设计
2017-09-22刘枫琛刘铁生吕成兴
刘枫琛,刘铁生,李 磊,吕成兴
(1.山东省海洋仪器仪表科技中心,山东青岛 266100;2.山东省科学院海洋仪器仪表研究所,山东青岛 266100)
喷水推进式无人船总体设计
刘枫琛1,2,刘铁生1,2,李 磊2,吕成兴2
(1.山东省海洋仪器仪表科技中心,山东青岛 266100;2.山东省科学院海洋仪器仪表研究所,山东青岛 266100)
文章讲述了喷水推进式无人船从无到有的整体过程,着重介绍了无人船在设计过程中对船型技术、总体布局优化、推进设施配备等方面的主要关键技术研究,并简要说明了无人船的基本情况。
无人船;喷水推进;海上监测;
0 引言
无人船的发展最早可追溯到1898年,当时著名发明家尼古拉·特拉斯发明了名为“无线机器人”的遥控船。近年来,作为一种新型的海上监测搭载平台,无人船具有极为广阔的应用前景。进入21世纪,随着推进技术、海上智能监测、通信、人工智能等新技术、新理念的迅速发展,制约无人船船发展的诸多技术瓶颈得以部分解决,各国加大了无人船的研发力度,无人船迎来了一段高速发展期。无人船无论在军事上还是民用领域,都已有尝试性应用并取得了一定的成功。未来,无人船的应用领域将越来越广泛,逐步扮演更加重要的角色[1]。业内预测,无人船在水质监测、水下测绘等十几个方面将有数百亿美元的市场[2]。本文就喷水推进式无人船总体研究设计及建造流程的主要关键技术作简要介绍。
1 喷水推进式无人船设计简要
该无人船为微小型沿海无人测量船,搭载相关测量仪器,主要完成沿海监测任务。具备功能包括,在满载排水量状态下,巡航速度续航时间为1.8 h。在满载排水量状态下,工作航速续航时间为3 h。可以连续工作2 h~3 h,遥控距离300 m;巡航速度约为10 kn,工作航速为6 kn。无人船生存海况3级,工作海况2级(含)以下,推荐工作海况1级。仪器舱可搭载雷达、多/单波束、声呐、回音测深仪、ADCP以及其他小型设备。
2 喷水推进式无人船总体设计
2.1 无人船主要参数选择
无人船的主要参数见表1。
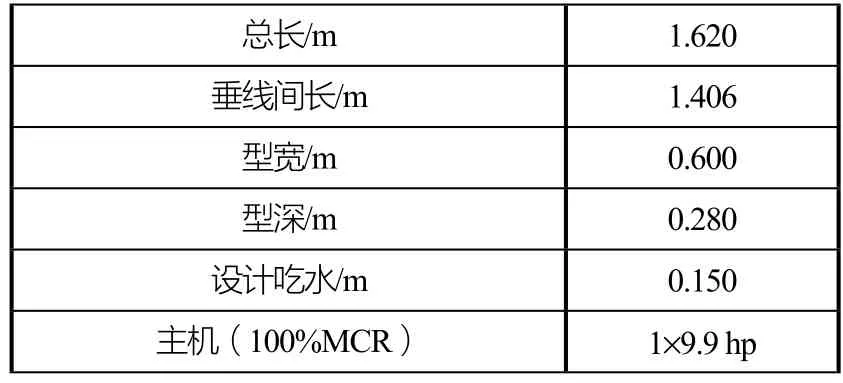
表1 主要参数
2.2 无人船阻力预报
根据阻力估算公式估算出该无人船速度—阻力曲线[3-4],并且通过船舶设计专用软件Max-surf中阻力模块计算其速度—阻力曲线,结合阻力经验公式与船舶设计专用软件Max-surf阻力预报曲线,最终得出本文中所涉及无人船较为准确的阻力曲线,如图1所示。
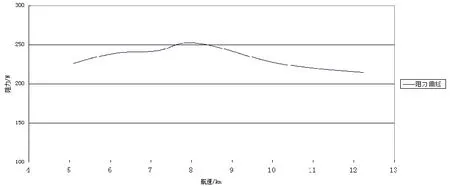
图1 喷水推进式无人船阻力预报图
2.3 无人船总体布置
该无人船壳体线型采用深V型设计,改善了无人船的稳性、耐波性,船体制作采用成熟技术,安全可靠,性能良好。
1)舱室
该无人船从船首向船尾依次为首尖舱、仪器舱和机舱。仪器舱位于无人船的中部,采用双层底结构。底部中心线安装测量设备的换能器装置,所有控制仪器、仪表、UPS电源等设备均安装在仪器舱内。舱底及两舷充填发泡材料。机舱位于平台的尾部,舱内安装汽油发动机、喷水泵、燃油箱、蓄电池等设备以及实现船遥控操作的底层执行机构。
2)护舷
该无人船设置软质护舷,对船体进行保护。护舷由外表面和充填材料组成,充填EVA高分子微孔泡沫材料;外表面采用聚脲弹性体材料。
3)甲板设备
船顶两侧设机舱进风口各1个,艉封板设出风口2个;机舱顶部各设进出口盖1个;仪器舱顶部各设进出口盖1个。
主要布置如图2所示。
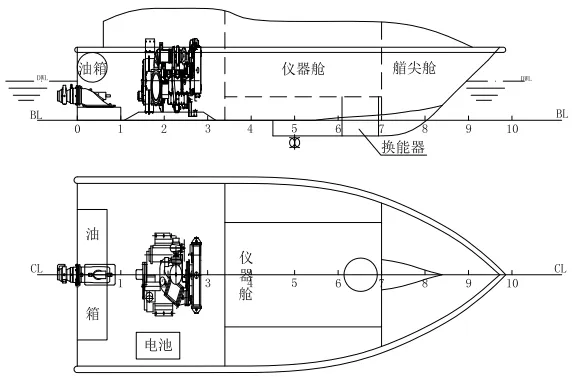
图2 喷水推进式无人船总布置图
通过重量统计以及无人船的浮态计算,获得稳心高度为394.9 mm,重心高度164.35 mm,所以由初稳性高计算公式可得无人船初稳性高为230.55 mm,纵倾角是尾纵倾0.52°[5]。
2.4 无人船喷水推进设计
该无人船选用舷内汽油机作为动力,技术成熟、性能稳定、操纵性能好、故障率低、容易保养,适合长期在海上工作。配备1台9.9便携式两冲程悬外机改装后作为推进动力。
喷水推进装置,具有抗空泡能力强、附体阻力小、保护性能好、噪音低、传动机构简单、适应变工能力强、船舶操纵性能佳等特点,在浅吃水、无舵轴和尾轴架等附件条件下比螺旋桨推进具有明显的优势,可实现船速的无级变换[6]。推进器重量约0.7 kg,喷口直径32 mm,适用发动机功率4 ps~6 ps(1 ps=0.735 498 7 kW)。受船舶布置空间的限制,同时为降低制造成本,受限于船体、装拆工艺及线路等方面的因素,喷水推进装置必须紧凑,这就要求喷水推进泵轴向和径向尺寸均要尽可能地小[7]。主机通过适配器驱动中间轴和喷水泵,轴系中心线在船舯面上。轴系由一根中间轴组成,轴的两端分别与主机适配器和喷水泵相连接。
汽油发动机的冷却方式为水冷,排烟均为湿式排烟,冷却水由喷水推进装置提供。当发动机运转时,通过传动轴驱动喷水推进装置运转,喷水推进装置通过一个支水管将喷出的部分海水,以一定的压力经海水滤器送入发动机,冷却发动机后,与发动机废气混合后经湿式排烟管排出船外。
3 无人船建造流程
无人船采用玻璃钢材料脱模制成,从而能够减轻船体重量,便于海上作业。根据型线图建造模具,而后进行无人船船壳加工,最终结果如图3所示。

图3 无人船船壳图
按照无人船船壳内部机舱空间尺寸大小,将发动机以及喷泵进行改装(见图 4)并成功安装,最终完成喷水推进式无人船的总体设计。
4 结论
鉴于目前无人船在海洋探测应用方面的广阔前景以及在建造材料上的轻量化等方面展现出的极大优势,世界各国都致力于无人船的设计研究,目前正处于飞速发展的关键阶段。然而在微小型无人船的海洋应用研究方面,我国与世界先进水平还存在差距。本文研究设计了一款喷水推进式无人船,并对其总体设计、建造流程以及应用前景等问题进行了简要的叙述,为今后我国微小型喷水推进式无人船在海洋探测领域的深入发展提供借鉴。

图4 发动机及喷泵改装图
[1]张树凯,刘正江,张显库,等.无人船艇的发展及展望[J].世界海运,2015(9): 29-36.
[2]黄锐.无人交通崛起 无人船要火[N].东莞日报,2015-05-25(B07).
[3]朱珉虎.高速艇与游艇设计手册[M].珠海: 珠海出版社,2008.
[4]中国船舶工业集团公司,中国船舶重工集团公司,中国造船工程协会.船舶设计实用手册[M].北京: 国防工业出版社,2013.
[5]盛振邦,刘应中.船舶原理[M].上海: 上海交通大学出版社,2003.
[6]曹琳,黄健,陈加蓉,等.采用喷水推进的3 000吨级水面舰船总体设计思考[J].船舶工程,2016(2): 28-37.
[7]张岩,刘建国,王立祥.喷水推进装置轴系设计技术探讨[J].船舶,2010(6): 5-9,12.
Overall Design of Water-jet Unmanned Boat
LIU Fengchen1,2,LIU Tiesheng1,2,LI Lei2,LYU Chengxing2
(1.Shandong Technological Center of Oceanographic Instrumentation,Shandong Qingdao 266100,China; 2.Shandong Technological Center of Oceanographic Instrumentation of Shandong Academy of Sciences,Shandong Qingdao 266100,China)
The paper introduces the whole process of the water-jet unmanned boat from 0 to 1.It describes the research of the main key technologies at the aspects of ship type,general arrangement optimization and water-jet facilities.The paper also briefly describes the basic overview of the unmanned boat.
unmanned boat; water-jet; marine monitoring
U664.3
A
10.14141/j.31-1981.2017.05.011
刘枫琛(1989—),男,助理工程师,研究方向:船舶设计。
