高层建筑救援直升机平台
2017-09-18杨述政
杨述政
高层建筑救援直升机平台
杨述政
(372324200104220016,山东省实验中学 山东 济南 250000)
本发明设计了一种超高层建筑救援直升机平台,可用于超高层建筑失火,地震等灾害的救援工作。本发明主要针对超高层建筑的救援工作,对于一般高度的建筑并不经济,为了填补超高层建筑救援的技术空白。其在结构上具有一架直升机,一个可发射的爬壁四足机器人,一套救援绳索。直升机具有发射装置,可将爬壁机器人发射到墙体上,爬壁机器人在结构上为四足结构,每个足端具有一个吸盘,腹部具有一个真空吸盘,可保证吸附的效果,爬壁机器人靠近待救援人员,给予绳索,开始救援。
高层建筑;爬壁机器人;发射装置;单绳速降;直升机
1 技术背景
超高层建筑具有占地面积小的特点,但在火灾地震等灾害下,无法快速救援的问题突出,造成不必要的额外损失。例如高层火灾具有火势蔓延快,疏散困难,扑救难度大的特点,
还具有向上蔓延速度远大于向下蔓延速度的特点,因此对于火灾发生点以下的位置,在电梯受损,楼梯口充满烟雾的情况下,有充足的时间进行救援工作。就目前现有技术而言,对于一定高度的火灾,现在有高层云梯救援和自救滑索装置,但其高度有限,因此,设计一种不受高度限制的高层建筑救援装置至关重要。
在参考文献的基础上得知,单元式的玻璃幕墙为众多超高层建筑所采用,因此采用吸盘式的爬壁机器人具有广泛的适应性,单元式的结构也为爬壁机器人提出了一定的跃障要求。
2 技术特点
本发明可很好的解决上述问题,首先直升机可以飞行到任意高度,进行悬停,并保持与着火点的合理距离,之后朝玻璃幕墙发射模块化的爬壁机器人,发射后的爬壁机器人可通过步态调整来迎合墙面,和降低倾覆力矩,之后爬壁机器人的四足结构使其可灵活的在墙体上爬行,以靠近待救援人员;此时救援人员只需将爬壁机器人上的救援绳索套在身上,跳出窗外即可,救援绳索的下降速度由直升机驾驶员操控,待人员落地后,直升机可边收集救援绳索,边使爬壁机器人移动到下一救援点,节省时间。
3 技术介绍
如下图1所示,为本发明的总体示意图,1直升机上装有2爬壁机器人发射仓和3救援绳索,3救援绳索在1直升机内缠绕,由1直升机驾驶员操纵其收放;3救援绳索的末端系于爬壁机器人的背部,随同爬壁机器人的发射一起到达墙面;救援时,直升机驾驶员观察墙面,发现6待救援人员,朝6待救援人员附近发射模块化的5爬壁机器人,之后操纵5爬壁机器人朝6待救援人员靠近,给予其3救援绳索,6待救援人员将3救援绳索套与腋下,跳出窗外,5爬壁机器人背部具有绳索减速装置且由直升机驾驶员控制,可控制6被救人员的下降速度,具有紧急制动能力,保证救援的安全性;6待救援人员到底后,直升机驾驶员一边操纵3救援绳索回收,一边操纵5爬壁机器人向下一代救援人员移动,提高救援效率。

图1 工作示意图
1直升机,2爬壁机器人发射仓,3救援绳索,4高层建筑,5爬壁机器人,6待救援人员
4 结构介绍
本发明在结构上主要有直升机的爬壁机器人发射机构,爬壁机器人的吸盘结构和救援绳索减速机构组成,下面将从此3方面介绍。
爬壁机器人发射机构:
此部分用于将爬壁机器人发射到墙面上,此部分采用弹簧力来作为发射力,首先,3救援绳索可在2d救援绳索驱动轮的驱动下将调整步态后的5爬壁机器人拉入发射仓,2c发射绳在2e发射绳驱动轮的带动下将2a活动推块拉到最低限位,即蓄能限位,2d救援绳驱动轮和2e发射绳驱动轮同时释放,可将爬壁机器人发射到建筑幕墙上。
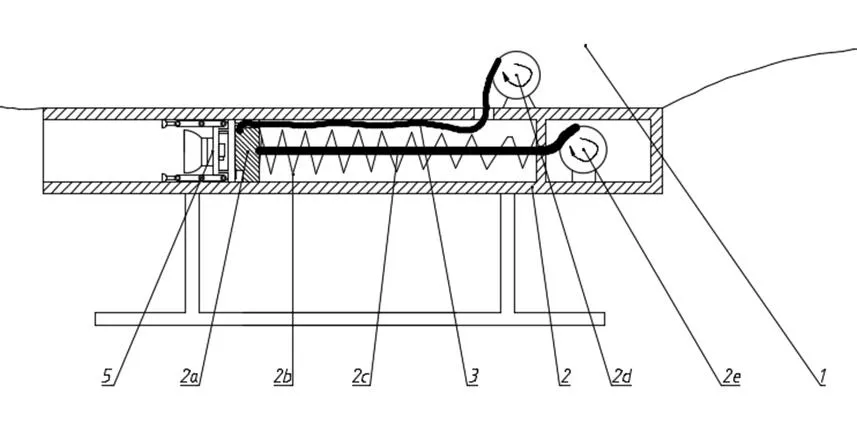
图2 发射机构示意
5爬壁机器人,2a活动推块,2b弹簧,2c发射绳,3救援绳索,2爬壁机器人发射仓,2d救援绳驱动轮,2e发射绳驱动轮,1直升机
5 爬壁机器人:
爬壁机器人为本发明的主要组成部分,它要包括爬壁机器人的吸盘结构和救援绳索减速机构。爬壁机器人在结构上为四足机器人形式,躯体为圆盘形,腿部共有4个自由度,分别为髋关节两个方向的转动,膝关节的转动,踝关节的转动,可使机器人具有灵活的工作空间。由于在躯体结构上为圆盘形,因此四条腿不存在严格意义上的前后腿,通过步态调整可实现换向运动。下图为结构示意图
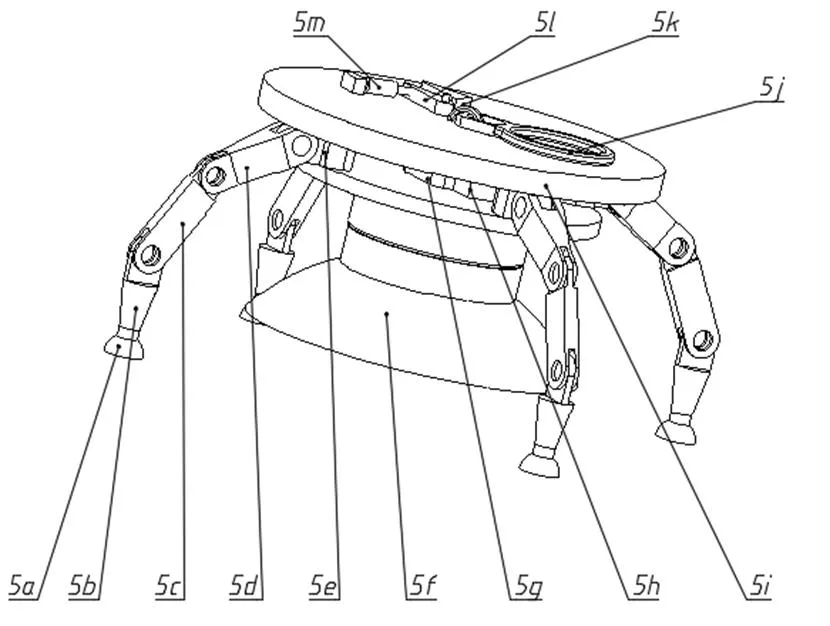
图3 爬壁机器人结构示意图
5a足端吸盘,5b足端,5c小腿,5d大腿,5e髋部,5f腹部真空吸盘,5g微型真空泵,5h控制模块,5i环形躯体,5j 减速环,5k固定夹块,5l活动夹块,5m液压缸
6 步态转换:
足端是爬壁机器人获得灵活运动能力的关键,本设计对足端的要求是:躯体不转动的换向,一定的越障能力,腹部真空吸盘的机械加压能力。下图为运动模式示意图,吸附步态为非移动步态,可通过各腿部关节的转动实现5f腹部真空吸盘的物理加压;由吸附步态调整到上下运动和左右运动模式时,5i环形躯体不需转动,各腿只需绕各髋关节的转动点转动即可,增加了运动的机动性;上下运动和左右运动模式时,爬壁机器人可模仿动物的腿部步态,实现一定的越障能力。

图4 运动模式示意
7 真空吸盘吸附结构:
腹部的真空吸盘对救援的安全性起到了重要的作用,吸附力的大小应能够达到要求,未达到要求时应能够报警。如图,5i环形躯体与5f腹部真空吸盘通过螺纹连接,5g微型真空泵通过5n气管连接5f腹部真空吸盘的真空仓,真空仓内有压力传感器,压低不足时,5h控制模块发出警报,并驱动腿部关节调整步态,实现物理加压和真空加压。
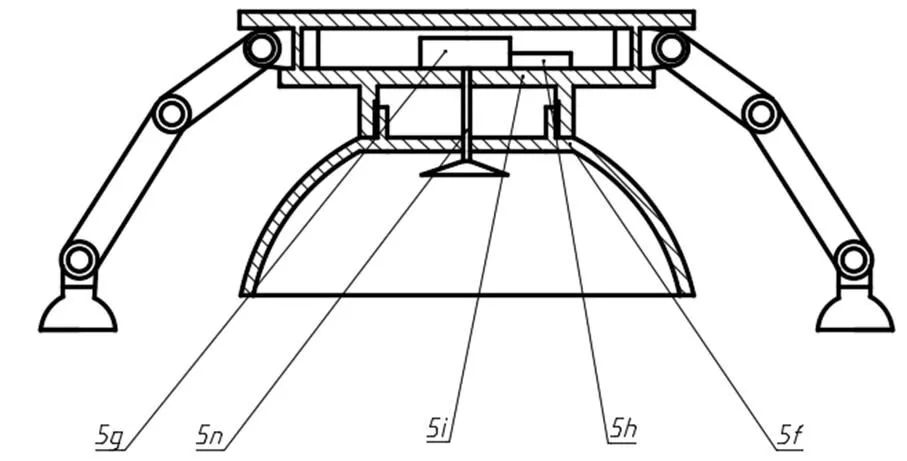
图5 真空吸盘吸附结构
5f腹部真空吸盘,5g微型真空泵,5h控制模块,5i环形躯体,5n气管
8 救援绳索减速机构:
救援绳索的单绳减速也是一个很重要的环节,此部分采用在5j8字环上缠绕,依靠摩擦减速的方式进行,当救援绳索末端承受被救人员的体重时,8字环承受主要的拉力,而5k和5l的夹紧力承受小部分的拉力,因此,在这压紧力作为拉力的控制力。5m液压缸首先压紧,此时待救援人员不下降,然后5m液压缸在5h控制模块的控制下夹紧力逐渐减小,而5h控制模块通过无线方式受到直升机驾驶员的控制,待救援人员的下降速度由直升机驾驶员目测控制5m液压缸的夹紧力。
此机构的好处在于救援绳索以爬壁机器人为临界点,被救人员一侧有拉力,直升机一侧没有拉力,这样就克服了绳索拉力对直升机飞行可能造成的影响。
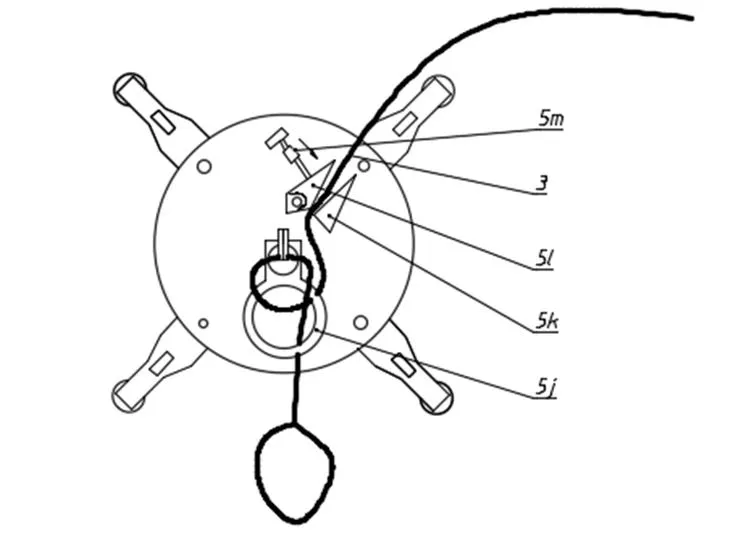
图6 救援绳索减速机构
5j8字环,5k固定夹块,5l活动夹块,3救援绳索,5m液压缸
[1]刘鸿文.材料力学.5版.北京:高等教育出版社 2010
[2]丁淑辉,孟晓军,边炳传.工业产品类CAD技能二三级(三维几何建模与处理)Pro/Engineer培训教程.北京:清华大学出版社 2010
[3]王铎,孙毅,程靳.理论力学.7版.北京:高等教育出版社 2009.
the invention designs a helicopter platform for rescue of super high rise building, which can be used for rescue work of fire and earthquake in Super high rise building. The invention mainly aims at the rescue work of Super high-rise buildings, and is not economical for a generally high height building, in order to fill the technical blank of the rescue of Super high-rise buildings. It is structurally equipped with a helicopter, a four-legged robot that can be launched, and a set of rescue ropes. The helicopter has a launch device that can launch a wall climbing robot into a wall. The wall climbing robot has a four-legged structure on the structure. Each foot has a sucker and the abdomen has a vacuum sucker, which can guarantee the effect of adsorption. The wall climbing robot is close to the rescue personnel and gives ropes. Start the rescue.
high-rise buildings; Climbing robots; (a) Launchers; Single rope speed drop; helicopter
10.19551/j.cnki.issn1672-9129.2017.11.093
U676.8
A
1672-9129(2017)11-0079-02