基于专利分析的仿人机器人国外发展态势研究
2017-09-18陈欣
陈 欣
基于专利分析的仿人机器人国外发展态势研究
陈 欣
(中国电子科技集团公司信息科学研究院 北京 100086)
仿人机器人是一个国家高技术实力和发展水平的重要标志,近年来国外仿人机器人相关专利申请数量持续快速增长。该文基于Dialog公司的Innography专利检索与分析平台以及智慧芽专利检索平台,利用Excel等分析工具,从技术分支专利申请趋势、主要申请人专利布局等维度,对国外两足机器人相关专利进行了分析,揭示了国外两足机器人研发和竞争态势,为我国科研机构在该技术领域的研发提供信息参考和启示。
仿人机器人;专利分析;研发态势
1 引言
仿人机器人是一个国家高技术实力和发展水平的重要标志,集机械、材料、电子、计算机、自动化等多门学科于一体,技术含量高,研究和开发的难度比较大。
仿人机器人的研究开始于20世纪60年代末,现在已经成为机器人技术领域里的主要研究方向之一。目前,在仿人机器人领域中,最著名的是日本本田研发的ASIMO,最新版本的ASIMO每只手都拥有13个自由运动轴,最新的版本还对肢体做了改进,它拥有更好的平衡性,还能快速的爬楼梯[1]。其次是由波士顿动力公司为美军开发的机器人Atlas,可以说是目前公认的最先进的人形机器人,不但可以行走,提取物品,关键是能在户外恶劣的地形下作业。
本文通过对仿人机器人领域的国外专利进行分析,揭示其研发技术布局及国外市场竞争态势。专利数据检索自Dialog公司的Innography全球专利数据库和智慧芽全球专利数据库,利用专利检索策略,共检索到10979件专利文献,共计4612项INPADOC专利族(检索时间2018年3月),本文以专利族进行各项数据统计和分析。专利数据分析工具包括Innography专利在线分析平台以及Excel等。
2 国外仿人机器人专利技术分析
2.1 主要技术分支技术发展趋势
仿人机器人的技术分支可广义分为控制系统、机体结构和驱动系统,本文检索的控制系统包括机器人步态控制、机器人脚掌反馈调节策略等方面[2]。本文检索的驱动系统包括电机驱动系统、气动系统、液压驱动系统[3]。
国外仿人机器人领域中专利布局最多的是日本、美国,日本在仿人机器人领域的专利布局主要集中在机体结构方面;美国的专利布局主要集中在机体结构和驱动系统方面,在控制系统的专利申请则较少。
2.2 主要技术分支申请人布局
在主要专利申请人的布局状况方面,在日本,机器人产业有非常完整而深厚的研发制造、产业升级基础,在过去的几十年里,仿人机器人领域中大部分研发机构均为日本企业,而日本企业十分注重知识产权布局与保护,因此,通过分析其专利布局,有助于及时了解该领域的研发动态。
如图1所示,专利布局数量排名前十一位的企业中,根据其布局特点可分为三类,第一类是布局较早并具有一定持续性的企业,这类企业技术实力雄厚,例如本田和索尼,1997年,本田公司研发的全球最早具备人类双足行走能力的类人型机器人阿西莫 (ASIMO) 诞生,此后几十年间本田仍不断进行技术创新,从1990年至今仍处于专利活跃期,在2000-2009年间达到活跃顶峰;索尼公司布局情况类似,其在2000-2004年间发布了机器人QRIO,因而进行了大量的专利布局。
第二类是布局时间也较早但未持续投入研发,例如AIST(日本产业技术综合研究所)、东芝、三菱重工、日立等,这类企业在2000年以后的专利布局较少,也未在该领域有新技术拓展。
第三类是2000年后,特别是2010年后,新进入该技术领域的企业,这类企业的进入为仿人机器人领域注入了新的活力,是观测该领域技术研发方向的重点关注对象,代表企业有三星、软银、丰田等公司。
三星公司在2005年推出了第一款双足机器人,其后又在2007年推出Mahru III[2],此后在2012年发布了人形机器人Roboray,具备了奔跑能力。从其专利布局可以看出早在2000年,三星已经开始对其系列产品申请专利保护,提早于其产品发布时间。
软银在2010-2014年间专利申请快速增长,开始进入活跃期,因其在2012年收购Aldebaran公司逾80%的股份,并将公司改名为SoftBank Robotics Europa,著名的智能机器人NAO、Pepper以及Romeo 都出自Aldebaran。2017年6月,软银再次收购Alphabet旗下机器人公司Schaft和波士顿动力公司,进一步增加其在仿人机器人领域的技术力量。
如图2所示,通过对国外专利申请数量排名前十一位的企业进行技术细分,可以呈现各企业的研发重点分布状况。第一类企业中本田公司在仿人机器人领域中的专利布局偏重于机体结构和控制系统,索尼公司则更注重在控制系统领域的专利布局。而第三类的新进入企业中,三星公司则偏重于控制系统专利布局,软银更注重机体结构和驱动系统的专利布局。
总体上看,国外仿人机器人领域中控制系统专利布局数量排名前三位的是索尼、本田和三星,机体结构专利布局排名前三位的是本田、索尼和丰田,驱动系统专利布局排名前三位的是本田、索尼和软银。

图1 国外仿人机器人领域主要专利申请人布局图
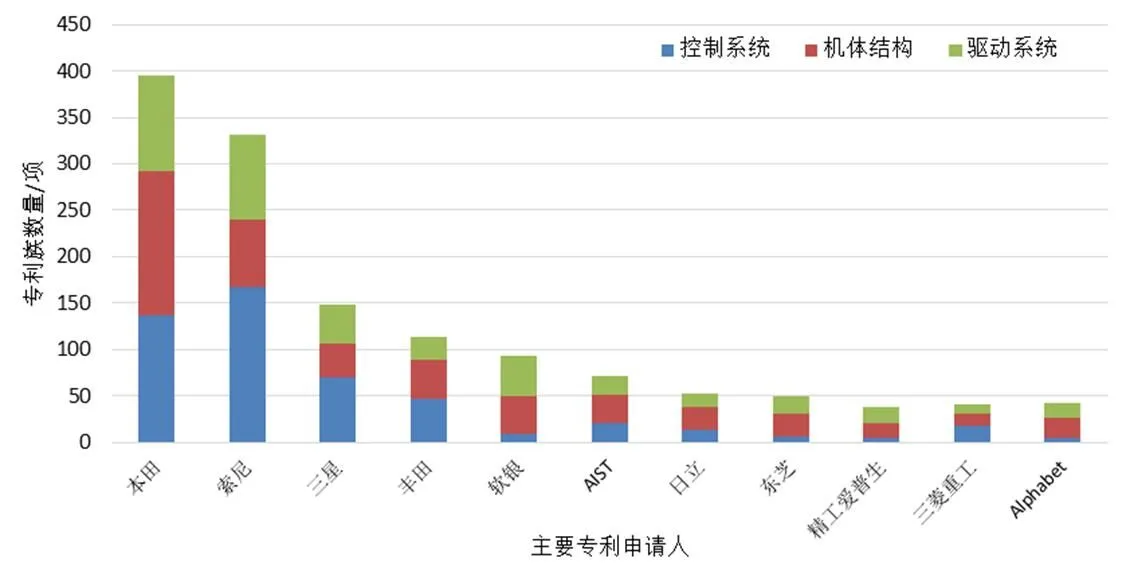
图2 国外仿人机器人领域主要技术分支申请人布局图
3 启示
以上分析也为我国企业的专利布局带来启示:
一是提前进行产品专利布局,通过梳理国外企业的专利申请趋势,可以看到其在产品面世前即开始进行专利布局,并且伴随整个产品周期,均有相关专利持续申请,国内企业和科研院所在进行技术研发或发表论文时,也应注意专利等知识产权的提前布局,以免技术成果公开后难以再进行专利申请;
二是对易于获取的技术采取专利形式进行保护,仿人机器人的三类主要技术分支中,机体结构、驱动系统易于通过反向工程获取技术,因此国外企业普遍通过专利途径用技术公开换取保护,而控制系统较难直接获取,技术拥有者则更倾向于通过技术秘密形式保护,国内企业和科研院所在规划项目专利申请时,也可根据技术是否易于获取来指定相应的专利布局策略,以便达到最大的保护效果。
[1]类人机器人的研究现状及展望[J]. 陈兵,骆敏舟,冯宝林,陈赛旋. 机器人技术与应用. 2013(04)
[2]双足机器人运动控制系统的研究[D]. 查望华. 浙江大学 2016
[3]仿人机器人下肢机构设计与分析[D]. 谈全一. 哈尔滨工业大学 2014
As an symbol of a country's high-tech strength level, Humanoid robot has a rapidly growth in recent years. In this article, based on the patent analysis method and Dialog’s Innography patent search and analysis platform and Zhihuiya patent search platform, using Excel and other analytical tools, the development status of humanoid robot is investigated from several aspects, including key technology branch, organizations, to provide intelligence support for further development of humanoid robot industry and technologies.
humanoid robot; patent analysis; R&D situation
10.19551/j.cnki.issn1672-9129.2017.11.036
TF341.6;TP242
A
1672-9129(2017)11-0031-01