三相异步电动机制动方式及电路分析
2017-09-18张云秀陈绍志崔成梅
张云秀 陈绍志 崔成梅
(潍坊工程职业学院 山东 潍坊 262500)
三相异步电动机制动方式及电路分析
张云秀 陈绍志 崔成梅
(潍坊工程职业学院 山东 潍坊 262500)
本文对三相异步电动机三种制动方式的制动原理、工作电路进行了叙述,并总结出各种制动的优缺点及适用场合,可为电气专业人员进行电气设计提供有价值的参考。
电动机;机械制动;能耗制动;反接制动
三相异步电动机在生产中得到了广泛应用,而在生产过程中为实现某种目的经常需要电动机减速或停止,如起重机下放货物时,为克服货物重力加速度,保持货物平稳下放,需要电动机减速运行,电动机的这些减速或停止动作统称为电动机的制动。
针对不同的电气设备,不同的负载情况,为实现不同的制动目的,满足不同的生产要求,需采用不同的制动方式,最常见的有以下三种:
1 机械制动
1.1 概念。利用机械装置使电动机断电后立即停转的方法即为机械制动,常用的机械装置为电磁抱闸。机械制动控制电路如图1所示。
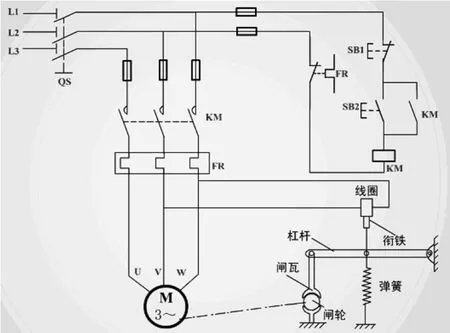
图1 机械制动控制电路
1.2 工作原理。合上电源开关QS电源引入,按下启动按钮SB2,右侧控制电路形成回路,交流接触器KM线圈得电,与SB2并联的KM的常开触点闭合,形成自锁,同时KM在主电路中的主触点闭合,左侧主电路形成回路,电动机M连续运转。与此同时,主电路中电磁抱闸线圈通电,吸引衔铁向上运动,衔铁通过杠杆带动闸瓦运动,闸瓦松开闸轮,此时电磁抱闸处于离合状态,没有制动作用,电动机正常运转。
按下停止按钮SB1,右侧控制电路被切断,交流接触器KM的线圈失电,与SB2并联的KM的常开触点断开,自锁失效,同时KM在主电路中的主触点断开,主电路中电磁抱闸线圈断电,线圈失去对衔铁的磁吸力,在弹簧的拉力下衔铁向下运动,衔铁通过杠杆带动闸瓦运动,闸瓦抱紧闸轮,电动机迅速停转。
1.3 特点及适用范围。此种制动方式安全可靠,能够让电动机在短时间内迅速停车,保证了设备的动作准确度;同时闸轮与闸瓦之间依靠摩擦力制动,可以提供很大的制动转矩,因此可以克服极大的电机转动力矩;此外,即便突然断电,此种制动方式不受影响,依然可以准确无误的动作。但该制动方式有其缺点:短时间内迅速停车对设备冲击较大,振动较大;闸轮与闸瓦间摩擦力大,电磁抱闸易损坏,需定期检查;由于机械抱闸占用一定的空间,所以对于要求结构紧凑的场合并不适用。该种制动方式一般用在起重机械上。
2 能耗制动
2.1 概念。所谓能耗制动就是在断开交流电源后,立即在定子中通入直流电,通过转子电阻消耗电能迫使电动机尽快停转,其本质是将转子的动能转换成转子的热能。电动机能耗制动控制电路如图2所示,电路由左侧的主电路、中间的整流电路和右侧的控制电路三部分组成。

图2 能耗制动控制电路
2.2 工作原理。合上电源开关QS电源引入,按下启动按钮SB2,控制电路左侧支路形成回路,交流接触器KM1线圈得电,KM1串联在中间支路中的常闭触点断开形成互锁,与SB2并联的KM1的常开触点闭合,形成自锁,KM1串联在主电路中的主触点闭合使主电路形成回路,电动机M开始转动。
按下复合按钮SB1,其常闭触点断开,控制电路左侧支路断路,KM1线圈失电,KM1加在SB2两端的自锁失效,KM1串联在中间支路中的互锁失效,KM1串联在主电路中的主触点断开,电动机M失电。
再按下复合按钮SB1,其常开触点闭合,控制电路中间支路形成回路,交流接触器KM2线圈通电,KM2主触点闭合,整流电路形成回路,电动机开始制动;且时间继电器KT线圈闭合。一段时间后,时间继电器KT的常闭触点断开,KM2线圈失电,KM2主触点断开,整流电路断路,制动结束。
2.3 特点及适用范围。此种制动方式操作简单,制动过程稳定无冲击,但随着电动机转速的降低,制动力矩变小,整个制动过程时间较长。该制动方式适用于需平稳、准确停车的设备,如各种通用机床。
3 电源反接制动
3.1 概念。所谓反接制动就是切断电动机正转电路后,立即将三相电源中的任意两相对调,通过改变定子的旋转磁场方向,产生反向转矩,使电动机迅速停转。电源反接制动控制电路如图3所示。
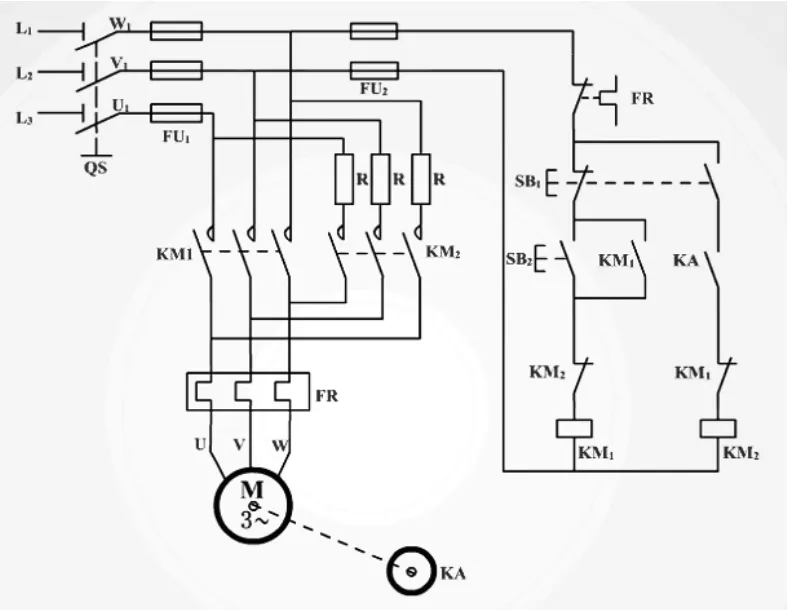
图3 电源反接制动控制电路
3.2 工作原理。合上电源开关QS电源引入,按下启动按钮SB2,控制电路左侧支路形成回路,交流接触器KM1线圈得电,KM1串联在右侧支路中的常闭触点断开,形成互锁;与SB2并联的KM1的常开触点闭合,形成自锁;与主电路串联的KM1的主触点闭合,主电路形成回路,电动机M开始正转;当电动机达到设定速度时,串联在控制电路右侧支路中的速度继电器KA闭合。
结束工作时,按下复合按钮SB1,其常闭触点断开,控制电路左侧支路断路,KM1线圈失电,KM1主触点断开,电动机M正转断电;再按下复合按钮SB1,其常开触点闭合,控制电路右侧支路形成回路,交流接触器KM2线圈得电,KM2主触点闭合,电动机通入反向电源,产生反转力矩;当电动机降至设定速度时,速度继电器KA断开,制动结束。
3.3 特点及适用范围。此种制动方式操作简单,制动迅速,但其消耗能量多,且电机停转后若未及时切断电源,电机容易反转,因此只适用于对定位准确度要求不高的场合。
[1]王林.三相异步电动机的制动 [J].学周刊,2011 (06):206~207.
[2]王绍华.三相交流异步电动机三种制动电路原理剖析 [N].电子报,2010-9-12.

