靶向灭草机器人药液喷洒空气动力学模型建立与验证
2017-09-15权龙哲王建森奚德君郦亚军孙文峰
权龙哲,王建森,奚德君,郦亚军,孙文峰,陈 词
靶向灭草机器人药液喷洒空气动力学模型建立与验证
权龙哲,王建森,奚德君,郦亚军,孙文峰※,陈 词
(东北农业大学工程学院,哈尔滨 150030)
为提高除草剂的有效利用率、降低环境污染,该文研制了一种靶向灭草机器人,建立机器人的药液喷洒动力学模型是提高对靶施药精度的关键。在综合考虑多种影响因素前提下,采用空气动力学原理建立了液滴在喷洒过程中的动力学模型,并推导出液滴的落地点公式;在此基础上通过计算机数值模拟得出了液滴群的落地覆盖区域,同时分析了液滴阻力特性及各工作参数对运动过程的影响;在室内无风条件下,应用高速摄像技术进行了喷洒试验,将液滴群的实际落地覆盖区域与理论覆盖区域比对,相对误差为8%~13%,同时采用吸水纸称质量法分析了药液有效覆盖区域的沉积量分布特性。研究结果表明:借由药液喷洒动力学模型得出的理论药液覆盖区域与试验结果具有一定的吻合性,验证了模型的适用性。该研究可为搭建相关靶向喷洒系统提供参考。
机器人;模型;计算机仿真;对靶施药;药液覆盖区
权龙哲,王建森,奚德君,郦亚军,孙文峰,陈 词. 靶向灭草机器人药液喷洒空气动力学模型建立与验证[J]. 农业工程学报,2017,33(15):72-80. doi:10.11975/j.issn.1002-6819.2017.15.009 http://www.tcsae.org
Quan Longzhe, Wang Jiansen, Xi Dejun, Li Yajun, Sun Wenfeng, Chen Ci. Aerodynamics modeling and validation on liquid medicine spraying of target weeding robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 72-80. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.15.009 http://www.tcsae.org
0 引 言
精准施药技术能够根据杂草和作物在空间上分布的不同定点喷洒除草剂,可有效提高农药利用率,降低环境污染[1-2],针对该项技术相关研究人员从不同侧面开展了广泛而深入的研究。
为提高药液投放精度,相关研究人员通过水力学基本定理或药液动力学模型,对广义液滴在空气中的运动规律进行了分析:Chow等[3]基于牛顿第二定律,在考虑重力和空气阻力的前提下,建立了描述药液运动规律的动量方程;何志霞等[4]以欧拉-拉格朗日模型为基础,对油滴的运动特性和粒径尺寸进行了分析;脱云飞等[5]在无风条件下根据水力学基本原理,将水滴运动分解,推算出理论射程公式;张慧春等[6-7]利用激光成像系统和激光粒度仪测定喷雾角和雾滴粒径,并研究了雾化机理。为控制药液投放环节的损耗,相关学者针对液滴飘逸和沉降损失开展了研究:李超等[8-9]利用风送式喷雾装置提高药液的附着量;宋坚利等[10-11]设计了药液回收装置,使未附着在茎叶上的药液流回药箱以便重复利用;何雄奎等[12-13]设计了静电喷雾喷头,使药液在静电场力的作用下定向运动,能够有效吸附在靶标部位上。任宁等[14-15]研制了一种工作频率为60 kHz的微型指数振子超声雾化喷头及喷头,可以产生更细的雾滴,从而提高附着量。
由以上研究可知,无论针对药液喷洒的动力学研究还是关于药液损耗控制的研究,都是以喷头固连在机器上(固定投药方向)为前提开展的相关研究[16-18],然而杂草的分布位置和生长姿态差异较大,固定喷头难以实现精准对靶[19-23],因此以改变药液投放方向的对靶施药模式为基础,开展药液喷洒动力学的理论与试验研究,以期为精准施药技术发展提供参考。
1 靶向灭草机器人简介
1.1 系统总体结构
本文研制了一种靶向灭草机器人,以该机器人为基础平台,开展药液喷洒动力学的研究,如图1所示。
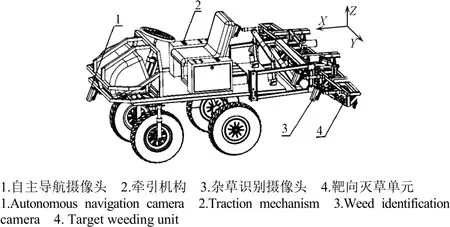
图1 靶向灭草机器人Fig.1 Target weeding robot
该机器人由自主导航摄像头1、牵引机构2、杂草识别摄像头3和靶向灭草单元4等组成,牵引机构配合自主导航摄像头可实现无极变速、匀速行驶和田间自主行走功能,苗草识别摄像头配合靶向灭草单元,可实现靶向除草作业功能,其中杂草识别摄像头和灭草单元挂接于牵引机构后部,可调整在竖直方向的位置,以适应不同高度的作物。
1.2 工作原理
靶向灭草单元的初始状态如图2a所示。杂草识别摄像头2置于喷头3前方,以便调整喷洒延时,杂草识别摄像头2对田间作物进行识别,判别其是否为靶标作物,控制系统可获取靶标位置信息并驱动电机1,调整喷头3使其指向靶标位置(如图2b、图2c所示),当喷头达到预定旋转角度后,控制系统短暂开启电磁阀投射药液,至此完成靶向灭草任务。
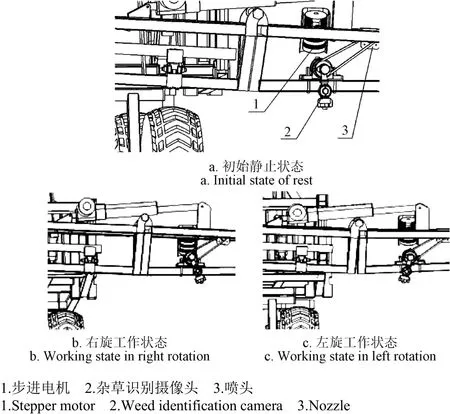
图2 靶向灭草单元Fig.2 Target weeding unit
1.3 靶向灭草的喷施特点
当喷头固连在承载臂上时,液滴群构成的包络轨迹线不可改变。如果靶标作物在液滴密度较小的包络轨迹线边缘时(如图3a),为获得足够的有效药液投放量,就需要增大药液的总体投放量,导致药液浪费[24]。因此,本文采用单喷头旋转的方式完成靶向施药,改变喷头喷射倾角以获得不同的包络轨迹线,以便对任意靶标区进行覆盖(如图3b)。
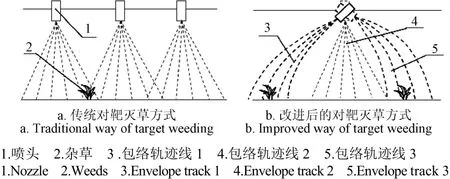
图3 靶向灭草的作业特点Fig.3 Characteristics of target weeding
2 靶向灭草作业中液滴的动力学分析
由于旋转喷头液滴群轨迹的运动学建模是实现对靶喷施的关键,所以本节将对旋转喷头的药液群运动轨迹及覆盖区域进行定量建模和数值模拟。
2.1 液滴运动模型的建立
液滴运动模型的基本假设:①液滴在喷头出口处形成;②液滴在运动过程中近似为球状;③不考虑液滴运动过程中的蒸发量[5](通常认为喷灌的蒸发损失不大于4%);④因运动时空气浮力远小于重力,故模型中忽略其影响;⑤压力增大时喷淋角度的改变微小,故模型中认为喷淋角度为喷头固有特性,与压力无关。
液滴由喷头喷射出的同时,喷头也在绕固定轴做定轴转动,通过构建液滴的复合运动,实现液滴包络轨迹线的灵活改变,喷头在不同的转角下液滴所形成的运动包络轨迹如图4所示(垂直纸张向外为机器行进方向),图4中工作位置1设为启动点,工作位置2为理论喷射工作点(喷头在此点喷射),工作位置3为停止点。喷头启停前后,角速度变化较大,而在2号工作位置附近转动平稳,理论上保证了匀速转动,所以本文选择2号工作位置进行研究。因此液滴的绝对速度va为:

式中vr为最外侧液滴相对喷头的喷射速度,m/s;ve1为喷头旋转的线速度,m/s;ve2为车体行进的速度,m/s。
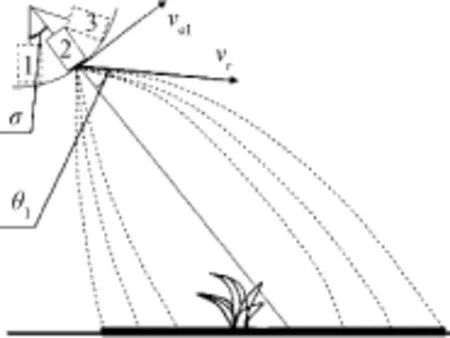
图4 靶向灭草工作原理简图Fig.4 Working principle diagram of target weeding
液滴运动轨迹和落地覆盖区的包络特性为本文的研究重点,故取液滴群最外层的液滴为研究对象,确定最外侧液滴的位置可通过最大喷射夹角和喷射径向夹角2个参数确定(如图5所示),其中最大喷射夹角θ1是喷头所喷射出雾滴锥形体的最大夹角,由喷头出厂参数可查得,喷射径向夹角θ2是喷头喷射出雾滴在其径向与机器行进方向的夹角。为确定边缘液滴的运动规律,需对液滴的速度在特定的坐标系中进行分解(如图6所示)。
图6a中的OX′Y′Z′是固结在喷头上的相对坐标系,图6b中的OXYZ是固结在车体上的相对坐标系,图6b中相对坐标系OX′Y′Z′是绕图6a中的OX′轴进行旋转得到的。
首先在图5a中对vr正交分解,后利用图6b中2个相对坐标系间的几何关系,获得液滴的速度分解方程:

式中θ1为最大喷射夹角,(°);θ2为径向夹角,(°);σ为喷头旋转角度,(°);v0x为液滴初始速度在X轴方向的投影,m/s;v0y为液滴初始速度在Y轴方向的投影,m/s;v0z为液滴初始速度在Z轴方向的投影,m/s。
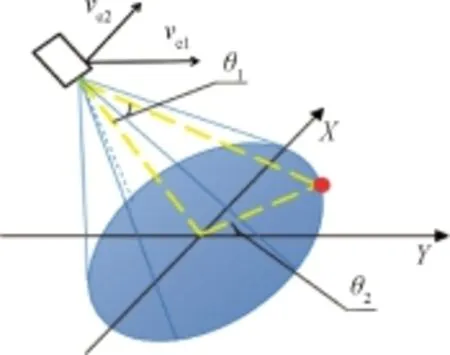
图5 液滴的最大喷射夹角和径向夹角Fig.5 Maximum spray angle and radial angle of droplet
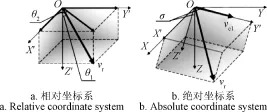
图6 液滴速度分解示意图Fig.6 Decomposited droplet velocity diagram
根据牛顿第二定律,在考虑空气阻力时,液滴落地前的空间运动方程为:
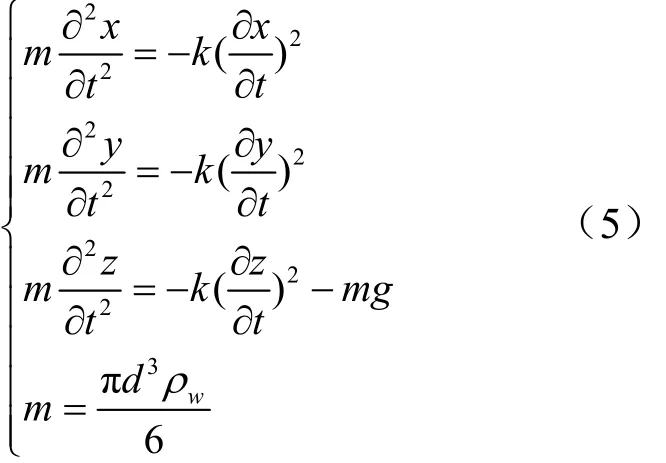
式中m为液滴质量,kg;ρw为密度,kg/m3;d为液滴直径,m;t为液滴运动时间,s;x,y,z为液滴在t时刻的坐标,m;k为摩擦系数,kg/m;g为重力加速度,m/s2。
式中的摩擦系数国内外已做了大量研究,计算公式各有不同,考虑到流态故采用下公式[25]:

式中ρk为空气密度,取离地2 m常温常压的状态,此时ρk为1.23 kg/m3;φ为阻力因数,主要根据孔流的雷诺系数Re确定[22],水流流态不同时阻力系数不同:
层流时(Re≤2 000):

过渡流时(2 000<Re<4 000):

紊流时(Re≥4 000),φ=0.18。
由喷头液滴的形成过程可知雷诺系数较大,流态为紊流[26-28],故φ=0.18。由式(6)可知,液滴平均直径对模型影响程度较大,Mugele和Evans采用上限对数正态分布ULLN法描述喷头水滴分布方法[29],通过统计分析得出累计频率为50%的水滴直径d50公式[30]:

式中Nd为喷嘴直径,mm;P为工作压力,kPa。
根据液滴运动的初始条件有:
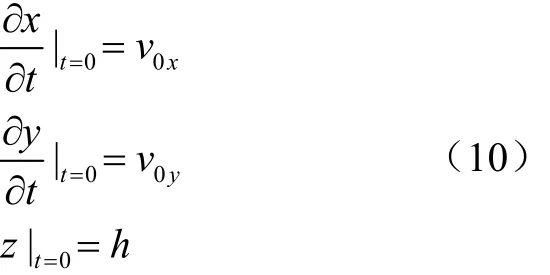
将其代入式(5)并整理有:

同理,可求出y、z的解:
式中h为喷头与地面间垂直距离。至此即获得了液滴在空间当中的位置随时间的变化规律。
2.2 液滴群覆盖区域的求解
液滴落地覆盖区与杂草的重合程度直接影响除草效果,故需根据式(11)、(12)、(13)确定液滴群落地的覆盖区域。z=0时,通过式(13)可求出出液滴落地时间t0。
将t0带入式(11)(12)可求出每个液滴落地后的二维平面坐标:

为简化模型将覆盖区域近似为椭圆,椭圆形心和杂草形心坐标相重合,此时椭圆形心即为靶标点坐标。
为进一步完善运动模型,还需确定靶标点坐标和喷头转角、喷射压力间的关系。在上述模型基础上取类椭圆覆盖区短轴的2个端点,即θ2为90°和270°。可得到:A1(X1,Y1)、A2(X2,Y2),进而可得到靶标点坐A0[0.5(X1+X2),0.5(Y1+Y2)],将该坐标与式(15)联立,随后分别将式(2)、(3)、(4)中速度分量带入联立结果得:
式中v0x1、v0x2、v0y1、v0y2为通过类椭圆覆盖区短轴的2个端点进而计算出的2个液滴的初始速度。由于式(16)中的(X1+X2)/2受车速影响,为使喷洒覆盖区域的形心与靶标点完全重合还必须根据车速的不同来控制喷洒延迟时间,其对应关系如下

式中T0为喷洒延迟时间,s;S为摄像头与喷头的垂直距离,m。由式(17)可知车速并不影响液滴覆盖区的形态,仅影响液滴群覆盖区在车行进方向上的位移。
最后将式(16)、式(17)与由视觉系统提供的准确靶标参数对应联立,便可得到靶标点和喷头转角σ、药液初始速度vr、喷头转速ve1、喷洒延迟时间T0和车速ve2间的关系。其中药液初始速度由不同喷头型号受施加的不同水压而控制(具体查阅喷头出厂参数手册)。
2.3 模型的数值模拟
为验证模型中不同的喷头位姿和工作参数对覆盖区的影响,对模型进行数值仿真。如图7所示,在机车行进速度1 m/s、阻力因数取0.35、喷射压力取0.3 MPa(后续试验所用喷头0.3 MPa压力下液滴的喷射速度)的条件下,依次递增喷头转角,用以分析所形成落地覆盖区域的变化规律。
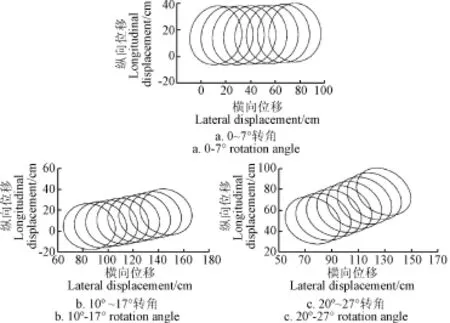
图7 喷头转角对液滴覆盖区域的影响Fig.7 Influence of nozzle rotation angle on area of droplet coverage
如图7a所示,从左向右依次为喷头转角以1°为步长,由0°逐渐变化至7°所形成的系列覆盖区,在此范围内可看出:喷头转角的变化对覆盖区形状的影响较小,对覆盖区的横向相对位移影响较大。图7b从左向右依次为喷头转角以1°为步长,由10°逐渐变化至17°所形成的系列覆盖区,在此范围内可看出:一方面随倾角的改变覆盖区除整体产生横向相对位移外,还产生了纵向的相对位移;另一方面覆盖区由接近标准的圆形逐渐变为倾斜的类椭圆形,但此时形状变化较小。覆盖区产生纵向相对位移是由于喷头旋转后竖直方向的速度分量变小,导致整体落地时间少量增加,而覆盖区形态的改变则是由于水平面上两速度分量变化不均匀引起的。如图7c所示,从左向右依次为喷头倾角以1°为步长,由20°逐渐变化至27°所形成的覆盖区,可以看出:一方面在45°对角线方向覆盖区宽度逐渐收缩,在−45°对角线方向宽度逐渐增加,整个液滴覆盖区域逐渐变化成为倾斜的类椭圆形;另一方面各覆盖区的纵向相对位移大于图7a和图7b,由式(12)、(13)可知,随喷头转角的增大,液滴在空气中运动的时间增大,导致液滴的纵向相对位移改变量大于横向相对位移改变量(受机车行进影响),并在45°对角线方向呈明显的收窄趋势。
如图8所示,在机车行进速度1 m/s、阻力因数取0.35条件下,分析液滴转角在5°、15°、25°时液滴初射速度对覆盖区的影响。

图8 液滴初始喷射速度对液滴覆盖区域的影响Fig8 Influence of droplet initial injection velocity on area of droplet coverage
如图8a所示,转角为5°,喷射速度为以0.5 m/s为步长,从1.5~5 m/s变化得到一系列覆盖区轮廓,可以看出随初始射速的递增其覆盖区面积逐渐增大,且右侧变化趋势大于左侧,即随速度的增加整个覆盖区域面积呈偏心式增长。如图8b所示,转角为15°,喷射速度为以0.5 m/s为步长,从1.5~5 m/s变化得到一系列覆盖区轮廓,此时随速度的增加覆盖区域面积随之增大,但整体会向右侧偏移,这说明在此范围内转角对横向相对偏移量的影响大于喷射速度对横向相对偏移量的影响。如图8c所示,转角为25°,喷射速度为以0.5 m/s为步长,从1.5~5 m/s变化得到一系列覆盖区轮廓,可以看出此时随速度的增加其覆盖区面积不仅增加,且横向相对位移要大于图7b时的工作情况,此时受较大转角的影响,单位射速的增加量对覆盖区域的横向位移影响程度增大。
3 靶向灭草试验与分析
3.1 药液覆盖区域的验证试验
为验证模型准确性和可靠性,需在不同工作参数下,将实际液滴群的覆盖区与理论覆盖区进行对比。
3.1.1 试验材料与方法
试验材料由锥雾喷头(意大利ARAG公司生产,最大喷雾夹角30°)、高速摄像机(KODAK公司生产)、压力表(YK-100B型精密数字压力表,精度±0.4%)、电磁流量计(MEACON公司生产,LDF型数显流量计,精度为±0.5%)、供水装置和相关相关辅助定位器具组成。为清晰的观测出液滴群的最大喷射夹角和初射速度采用短绒毛吸光黑布为背景,透明清澈的水为试验试剂,为保整良好光照环境采用2个照明功率为1 kW的新闻灯为光源,搭建的试验平台如图9。
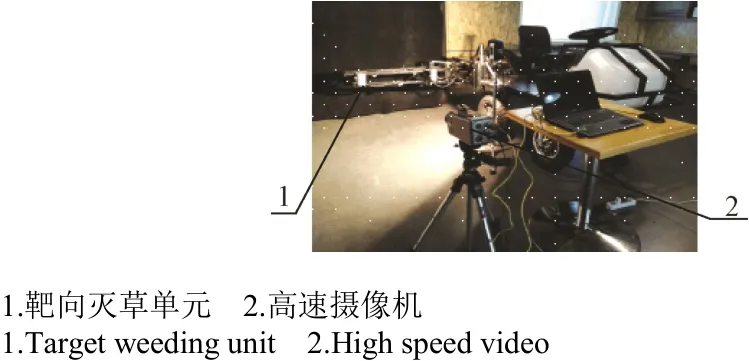
图9 靶向灭草试验平台Fig.9 Experimental platform of targeted weeding
由于液滴群落地后形态清晰可见,直接对喷洒后地面的水痕进行测量,即可反应实际覆盖区形态。首先在地面标记出假想杂草位置O点并烘干地面,拍摄时为获得精确度较高的图片,要求负载喷头的机械臂保持一定高度,高速摄像机安放于试验喷头一侧,调整高度、焦距,并令镜头轴线与喷头位位于同一水平高度,使车体以1 m/s的速度(使用FLUKE公司生产的931型测速仪,行进误差小于6.8%)匀速向前行进8 s,在第4 s时摄像头识别出靶标体并驱动喷头工作。设定工作压力分别为0.3和0.4 MPa进行试验(由出厂说明可知,压力0.3 MPa时液滴初射速度约为3.5 m/s,压力0.4 MPa时液滴初射速度约为4 m/s)。综合各因素影响,选择拍摄距离为4.5 m,拍摄频率为800 f/s,在不同的水压条件下开始按上述过程拍摄,拍摄完毕后,以靶标点为中心利用工业测量尺测出该靶标点与液滴覆盖区边缘的距离,沿顺时针方向以45°间隔进行采样,确认无误后烘干地面,重复5次上述试验步骤并对数据取均值。
3.1.2 数据的处理与分析
通过高速摄像设备采集喷雾图像,如图10所示,将图像信息上传至计算机,再进行增强、锐化等处理。找出边缘中有明显界限的部分,对最大喷射角度进行测量。为降低因喷雾动态变化及图像噪声引起的误差,取多帧图像进行分析,然后取多帧测量均值保证测量精度。
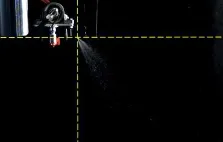
图10 高速摄像帧图Fig.10 One frame of high speed video
图11 为液滴覆盖区域对照试验。在图11中,实线表示覆盖区域的理论值,截取于图7与图8的仿真结果。虚线表示试验测量值,其原点为杂草所在靶标点,在图中0°方向为机器行进方向(图7、图8中的纵向),90°和270°方向为喷头左右旋转方向(图7、图8中的横向)。通过相对误差计算公式(式18)分别计算0°、45°、90°、135°、180°、225°、270°、315°共8个方向线上各自的相对误差值。

式中δ为特定测量方向线上的相对误差,百分数表示;Δ为该方向线上实际喷洒距离和计算喷洒距离的差值,mm;L为该方向线上实际喷洒距离,mm。
在求出各图每个方向的相对误差后,求均值得到各图的总相对误差,结果表明图11中各图的相对误差范围在8%~13%,由此可见,药液喷洒动力学模型得出的理论药液覆盖区域与试验结果具有一定的吻合性,可为搭建相关靶向喷洒系统提供参考。
3.2 靶向灭草施药的药液沉积量试验
为进一步研究靶向灭草施药特性,在了解其药液运动规律后,需进行其喷洒覆盖区域的药液沉积量分布试验。灌溉农业中,研究旋转喷头的水量分布一般采用雨量筒试验,而本文着重研究单喷头单次作业的药液沉积量特性,具有喷洒覆盖区域较小的特点,为满足试验精度采用吸水纸称质量法。
3.2.1 试验材料与方法
试验在专门搭建的喷灌试验厅进行,具有先进的测试仪表等设施,可保证试验精确。该试验分别以喷头转角5°、15°、25°等间隔设置3个采样点,如图12中3个圆形标记所示,喷头在此3点依次进行对靶喷施作业。准备3张奥克公司生产的60 cm×60 cm吸水纸,每张吸水纸的形心与采样点重合,各采样点准备工作如下:准备一张60 cm×60 cm吸水纸和2块同样大小的有机玻璃板,按照2 cm×2 cm大小的规格将上述材料依次裁为30×30个小块,再将其中一块有机玻璃用胶水按原样粘接,然后把吸水纸按原状态固定在已粘接好的有机玻璃上(记为1号),另外一块有机玻璃留作后续使用(记为2号)。试验液体为清澈透明的水,采用0.000 1 g万分之一分析天平称质量,喷雾时间、压力、喷头转角和转速由上位机编写的MATLAB人机交互界面调节,本文压力取0.3 MPa(此时初射速度约为3.5 m/s),喷头转速200 r/min,电磁阀开合时间约为1 s,车速约为1 m/s。
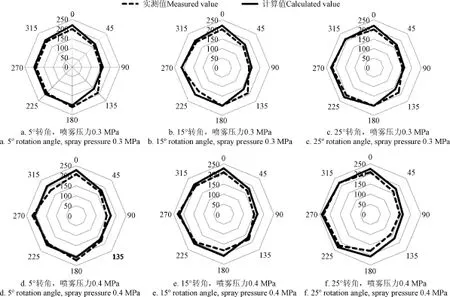
图11 液滴覆盖区域对照试验Fig11 Contrast experiment of droplet coverage area

图12 吸水纸称质量试验Fig.12 Experiment of water absorbent paper weight
试验开始时随机器的依次行进经过图12中所示的3个采样点,当对采样点完成3次靶向喷施后,立即进行沉积量的测定工作,每个采样点的测定步骤如下:①将2号玻璃盖在粘附有吸水纸上的一号玻璃上,测量每块夹有吸水纸的双层玻璃(2 cm×2 cm),质量计为G0;②将2号玻璃取下,1号玻璃中心点放置在靶标点处,调整好压力、喷头旋转角和转速,同一条件下连续喷射5次后取平均值;③为避免蒸发,待喷射完毕后立即将另一块有机玻璃覆盖于吸水试纸上;④对每一个2 cm×2 cm规格的小块进行标号,轻轻将夹有吸水纸的2块有机玻璃按原粘接方式分离,依次称质量计为Gn;⑤将每个2 cm×2 cm的玻璃夹层的质量与G0相减,即得到该区域的水量沉积数值Dn为:

3.2.2 数据的处理和分析
得到每个区域的水量沉积数值后,以正方形形心作为采样点,把数据输入至计算机,利用MATLAB编写的函数进行插值,并依此绘制水量分布图,如图13所示。通过对沉积量数据进行插值运算,获得连续的沉积量分布,如图13所示,图中沉积量较大地方颜色较深,图中沉积量较小地方颜色较浅,可依据此图确定沉积量峰值区域。
图13a为喷头转角为5°时的沉积量分布图,此图中沉积量总值为15.71 g,沉积量峰值区域出现在以横坐标为12~24 cm、纵坐标为12~21 cm封闭形成的区域内,在该区域中沉积量的均值为12.85 mg/cm2。图13b为喷头转角为15°时的沉积量分布图,此图中沉积量总值为17.13 g,沉积量峰值区域出现在以横坐标为11~27 cm、纵坐标为18~28 cm封闭形成的区域内,在该区域中沉积量的均值为13.65 mg/cm2。图13c为喷头转角为25°时的沉积量分布图,此图中沉积量总值为14.87 g,沉积量峰值区域出现在以横坐标为17~30 cm、纵坐标为13~25 cm封闭形成的区域内,在该区域中沉积量的均值为15.87 mg/cm2。由图13可知,一方面随倾斜角度逐渐变大横向覆盖距离逐渐收缩,实际作业中可以考虑增加喷头倾角的形式进而收窄作业区使得药液投放更为精准;另一方面可以看出随喷头转角的增加,沉积量峰值区域明显偏向喷头旋转方向,因无论采用何种方式进行投药,在保持喷射压力和喷洒时间不变的前提下,药液投放总量不变,所以改变喷射倾角的靶向定点施药方法,可有效控制药液沉积量的峰值点在有效覆盖区域中的位置,提高靶向施药精度。
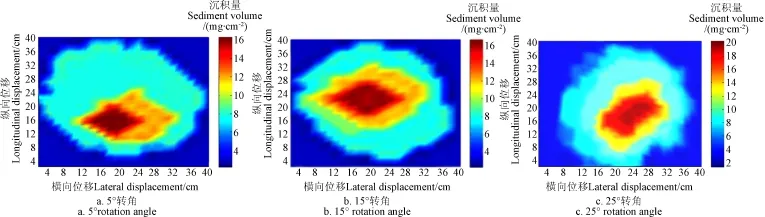
图13 液滴沉积量的分布Fig.13 Distribution of droplet sediment volume
4 结 论
1)建立了对靶施药方式中液滴的动力学模型,并进行了计算机数值模拟,发现当液滴喷射初始速度不变时,随喷头喷射倾角的增加,液滴落地覆盖区整体产生了横向位移和纵向位移,覆盖区由接近标准的圆形逐渐变为长短轴倾斜的类椭圆形;当喷头喷射倾角不变时,随液滴喷射初始速度的增加,液滴落地覆盖区的面积逐渐增大,且会产生小幅度的横向位移。
2)进行了药液覆盖区域的验证试验,将液滴群实际落地覆盖区域与理论覆盖区域比对,试验结果表明相对误差为8%~13%,药液喷洒动力学模型得出的理论药液覆盖区域与试验结果具有一定的吻合性。采用吸水纸称质量法分析了药液覆盖区的沉积量特性,喷头转角为5°时,沉积量峰值区域出现在以横坐标为12~24 cm、纵坐标为12~21 cm封闭形成的区域内,在该区域中沉积量的均值为12.85 mg/cm2;喷头转角为15°时,沉积量峰值区域出现在以横坐标为11~27 cm、纵坐标为18~28 cm封闭形成的区域内,在该区域中沉积量的均值为13.65 mg/cm2;喷头转角为25°时,沉积量峰值区域出现在以横坐标为17~30 cm、纵坐标为13~25 cm封闭形成的区域内,在该区域中沉积量的均值为15.87 mg/cm2,结果表明随倾斜角度逐渐变大沉积量峰值明显偏向喷头旋转方向,所以通过改变喷头倾角的对靶施药方式,可有效控制药液沉积量的峰值点在覆盖区域中的位置,以提高靶向施药精度。
[1] 张波,翟长远,李瀚哲,等. 精准施药技术与装备发展现状分析[J]. 农机化研究,2016,38(4):1-5,28.
Zhang Bo, Zhai Changyuan, Li Hanzhe, et al. Design of fertilizing machine’s furrow opener in jujube orchard and finite element analysis[J]. Journal of Agricultural Mechanization Research, 2016, 38(4): 1-5, 28. (in Chinese with English abstract)
[2] 赵春江,薛绪掌,王秀,等. 精准农业技术体系的研究进展与展望[J]. 农业工程学报,2003,19(4):7-12.
Zhao Chunjiang, Xue Xuzhang, Wang Xiu, et al. Advance and prospects of precision agriculture technology system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(4): 7-12. (in Chinese with English abstract)
[3] Chow W K, Yin R M. Water spray pattern discharged from high headroom a trium sprinkler[J]. Journal of Architectural Engineering,1999, 5(4): 133-140.
[4] 何志霞,张亮,王谦,等. 耦合喷嘴内流欧拉-拉格朗日喷雾模型研究[J]. 内燃机工程,2016,37(1):72-77.
He Zhixia,Zhang Liang,Wang Qian,et al. Investigation of euler lagrangian spray and atomization coupled with cavitaion flow in injector nozzles[J]. Journal of Mechanical Engineering, 2016, 37(1): 72-77. (in Chinese with English abstract)
[5] 脱云飞,杨路华,柴春岭,等. 喷头射程理论公式与试验研究[J]. 农业工程学报,2006,22(1):23-26.
Tuo Yunfei, Yang Luhua, Chai Chunling, et al. Experimental study and theoretical formula of the sprinkler range[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(1): 23-26. (in Chinese with English abstract)
[6] 张慧春,周宏平,郑加强,等. 喷头雾化性能及雾滴沉积可视化模型研究[J/OL]. 林业工程学报,2016,1(3):91-96.
Zhang Huichun, Zhou Hongping, Zheng Jiaqiang, et al. A study of spray nozzle atomization performance and droplet deposition visual model[J]. Journal of Forestry Engineering, 2016, 1(3): 91-96. (in Chinese with English abstract)
[7] 张慧春,Dorr Gary,郑加强,等. 扇形喷头雾滴粒径分布风洞试验[J]. 农业机械学报,2012,43(6):53-57+52.
Zhang Huichun, Dorr Gary, Zheng Jiaqiang, et al. Wind tunnel experiment of influence on droplet size distribution offlat fan nozzles[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 53-57+52. (in Chinese with English abstract)
[8] 李超,张晓辉,姜建辉,等. 葡萄园立管风送式喷雾机的研制与试验[J]. 农业工程学报,2013,29(4):71-78.
Li Chao, Zhang Xiaohui, Jiang Jianhui, et al. Development and experiment of riser air-blowing sprayer in vineyard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(4): 71-78. (in Chinese with English abstract)
[9] 宋淑然,夏侯炳,刘洪山,等. 风送式喷雾机喷筒结构优化数值模拟与试验[J]. 农业机械学报,2013,44(6):73-78.
Song Shuran, Xia Houbing, Liu Hongshan, et al. Numerical simulation and experiment of structural optimization for air-blast sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 73-78. (in Chinese with English abstract)
[10] 宋坚利,何雄奎,张京,等. “Π”型循环喷雾机设计[J].农业机械学报,2012,43(4):31-36.
Song Jianli, He Xiongkui, Zhang Jing, et al. Design of Π -type recycling tunnel sprayer[J]. Transactions of the Chinese Society of Agricultural Machinery, 2012, 43(4): 31-36. (in Chinese with English abstract)
[11] 闫晓海. 两位一体烟草喷雾机的设计与性能试验[D]. 泰安:山东农业大学,2015.
Yan Xianhai. Two-spraying-mode-in-one Tobacco Sprayer Design and Performance Test[D]. Taian: Shandong Agricultural University, 2015. (in Chinese with English abstract)
[12] 何雄奎,严苛荣,储金宇,等. 果园自动对靶静电喷雾机设计与试验研究[J]. 农业工程学报,2003,19(6):78-80.
He Xiongkui, Yan Kerong, Chu Jinyu, et al. Design and testing of the automatic target detecting, electrostatic, air assisted, orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(6): 78-80. (in Chinese with English abstract)
[13] 杨洲,牛萌萌,李君,等. 不同侧风和静电电压对静电喷雾飘移的影响[J]. 农业工程学报,2015,31(24):39-45.
Yang Zhou, Niu Mengmeng, Li Jun, et al. Influence of lateral wind and electrostatic voltage on spray drift of electrostatic sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(24): 39-45. (in Chinese with English abstract)
[14] 任宁,高建民. 低频超声雾化栽培喷头阻抗特性的数值模拟[J]. 农业工程学报,2009,25(5):115-118.
Ren Ning, Gao Jianmin. Numerical simulation of impedance characteristic of low-frequency ultrasonic nozzle for aeroponic culture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(5): 115-118. (in Chinese with English abstract)
[15] 高建民,任宁,顾峰,等. 低频超声雾化喷头优化设计及试验[J]. 江苏大学学报,2009,30(1):1-4.
Gao Jianmin, Ren Ning, Gu Feng, et al. Optimum design and experiment on low-frequency ultrasonic atomizing nozzles[J]. Journal of Jiangsu University, 2009, 30(1): 1-4. (in Chinese with English abstract)
[16] 胡炼,罗锡文,曾山,等. 基于机器视觉的株间机械除草装置的作物识别与定位方法[J]. 农业工程学报,2013,29(10):12-18.
Hu Lian, Luo Xiwen, Zeng Shan, et al. Plant recognition and localization for intra-row mechanical weeding device based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(10): 12-18. (in Chinese with English abstract)
[17] 刘雪美,李扬,李明,等. 喷杆喷雾机精确对靶施药系统设计与试验[J]. 农业机械学报,2016,47(3):37-44.
Liu Xuemei, Li Yang, Li Ming , et al. Design and test of smart-targeting spraying system on boom sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 37-44. (in Chinese with English abstract)
[18] 孟婷. 高效低污染施药植株对靶红外线探测实验研究[D].镇江:江苏大学,2009.
Meng Ting. Experimental Research of Infrared Detecting for Plants Targeting on High Efficiency and Low Pollution Pesticide Spraying[D]. Zhenjiang: Jiangsu University, 2009. (in Chinese with English abstract)
[19] 孟庆宽,张漫,仇瑞承,等. 基于改进遗传算法的农机具视觉导航线检测[J]. 农业机械学报,2014,45(10):39-46.
Meng Qingkuan, Zhang Man, Qiu Ruicheng, et al. Navigation line detection for farm machinery based on improved genetic algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 39-46. (in Chinese with English abstract)
[20] 刁智华,赵明珍,宋寅卯,等. 基于机器视觉的玉米精准施药系统作物行识别算法及系统实现[J]. 农业工程学报,2015,31(7):47-52.
Diao Zhihua, Zhao Mingzhen, Song Yinmao, et al. Crop line recognition algorithm and realization in precision pesticide system based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(7): 47-52. (in Chinese with English abstract)
[21] 毛文华,张银桥,王辉,等. 杂草信息实时获取技术与设备研究进展[J]. 农业机械学报,2013,44(1):190-195.
Mao Wenhua, Zhang Yinqiang, Wang Hui, et al. Advance techniques and equipments for real-time weed detection[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(1): 190-195. (in Chinese with English abstract)
[22] 邢占强. 智能化除草机器人技术发展现状及趋势展望[J].农业科技与装备,2015(5):37-38.
Xing Zhanqiang. Research on the technology develop ment of intelligent weeding robot[J]. Agricultural Science Technology and Equipment, 2015(5): 37-38. (in Chinese with English abstract)
[23] 刘文,徐丽明,邢洁洁,等. 作物株间机械除草技术的研究现状[J]. 农机化研究,2017,39(1):243-250.
Liu Wen, Xu Liming, Xing Jiejie, et al. Research status of mechanical intra-row weed control in row crops[J]. Journal of Agricultural Mechanization Research, 2017, 39(1): 243-250. (in Chinese with English abstract)
[24] 张文君. 农药雾滴雾化与在玉米植株上的沉积特性研究[D].北京:中国农业大学,2014.
Zhang Wenjun. The Study of Pesticide Droplets Atomiza-Tion and Deposit Characteristics in Corn Leaves[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[25] 王波雷. 旋转式喷头射程计算模型研究[D]. 杨凌:西北农林科技大学,2008.
Wang Bolei. The formula and Experiment Validation on Rotational Sprinkler Nozzle[D]. Yangling: Northwest Agriculture and Forestry University, 2008. (in Chinese with English abstract)
[26] 孔珑. 两相流体力学[M]. 北京:高等教育出版社,2004.
[27] 王双双,何雄奎,宋坚利,等. 农用喷头雾化粒径测试方法比较及分布函数拟合[J]. 农业工程学报,2014,30(20):34-42.
Wang Shuangshuang, He Xiongkui, Song Jianli, et al. Measurement comparison and fitted distribution equation of droplet size for agricultural nozzles[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(20): 34-42. (in Chinese with English abstract)
[28] 朱晓光,李景侠. 喷头的雾化机理及特点分析[J]. 化工装备技术,2010(3):10-11,14.
Zhu Xiaoguang, Li Jingxia. The mechaism and characteristic of nozzle pulverization[J]. Chemical Equipment Technology, 2010(3): 10-11, 14. (in Chinese with English abstract)
[29] Kincaid D C. Volumetric water droplet evaporation measurement[J]. Transactions of the ASME, 1989, 12(4): 16-22.
[30] 刘海军,龚时宏. 喷灌水滴的蒸发研究[J]. 节水灌溉,2000(2):16-19, 41.
Liu Haijun, Gong Shiyu. Study on evaporation of sprinkler droplets[J]. Water Saving Irrigation, 2000(2): 16-19, 41. (in Chinese with English abstract)
Aerodynamics modeling and validation on liquid medicine spraying of target weeding robot
Quan Longzhe, Wang Jiansen, Xi Dejun, Li Yajun, Sun Wenfeng※, Chen Ci
(College of Engineering, Northeast Agricultural University, Harbin 150030, China)
Field weeds have a great effect on the yield of normal economic crops. The commonly used methods of weeding include artificial weeding, mechanical weeding, weed quarantine, biological control, chemical control, and so on. Among those methods, chemical weeding is the best when it comes to sudden grass damage (the weeds of disaster break out suddenly), because it works well and takes less time. However, when we use chemical weeding, there are many problems such as low utilization rate of liquid medicine and serious pollution to the environment with overplus liquid. Therefore, toward-target pesticide application is proposed to solve these problems above all. As we all know, toward-target pesticide application machineries often use machine vision technology to obtain spatial location information of weeds, which makes the nozzle rigidly fixed on the machine and at the same time, the control system adjusts the valve to open and close to achieve the purpose of spraying. On this basis, we use spraying nozzle to change the direction of application, resulting in precision spraying in this paper. In order to study the law of motion for spray droplet, we established dynamic model based on application methods with the principle of aerodynamics, and then the formula of the droplet flying and the analytic formula of the falling point were deduced. Next, the numerical simulation analysis of the covering area was carried out. Especially, in the process of analysis, we discussed the resistance characteristics of spray droplets, the nozzle angle, nozzle speed, machine speed and injection pressure, which affect the movement process we discussed. What’s more, the model established above can also be used to control the location and shape of the droplet cover area by adjusting the working parameters, to improve the accuracy of toward-target pesticide application. Furthermore, in order to verify the correctness of the model, we set up the toward-target pesticide application platform and selected the special test site. Under no wind conditions, we conducted a simple target spraying test indoor, and then measured the geometric characteristics of actual liquid dripping place carefully. At the same time, the relevant parameters were obtained by high-speed camera technology. Next, we took the data into the dynamic model mentioned above to get the theoretical coverage of the liquid medicine, which was then compared with the actual coverage of the liquid medicine. Finally, it can be found that there is an error between the calculated and experimental results, and the error range is 8%-13%. In addition, to study the sedimentary characteristics of liquid medicine with this application method, we analysed the distribution law of the deposition amount of liquid medicine in the effective coverage area by water absorption paper weighing method. According to the analysis, it can be seen that the peak value of sediment changes regularly with the parameters such as the change of the nozzle angle, which suggests that the physical background of the model is clear, and the correlation between the parameters of the model and the sprinkler type is small, so the model transplant is strong. In other words, it can be used as a theoretical basis for the relevant spraying machinery.
robots; models; computer simulation; targeted weeding; liquid covering area
10.11975/j.issn.1002-6819.2017.15.009
S224.1
A
1002-6819(2017)-15-0072-09
2017-03-17
2017-06-07
国家自然科学基金资助项目(51405078);黑龙江省博士后基金(LBH-Z13022);黑龙江省普通高等学校青年创新人才培养计划(LR-356214);东北农业大学“青年才俊”项目(518020)
权龙哲,男,黑龙江哈尔滨人,副教授,博士,主要从事智能农业装备研究。哈尔滨 东北农业大学工程学院,150030。
Email:quanlonzhe@163.com
※通信作者:孙文峰,男,黑龙江哈尔滨人,研究员,主要从事植保机械研究。哈尔滨 东北农业大学工程学院,150030。Email:1012208287@qq.com
