农作物表型快速检测移动机器人系统及其主梁有限元分析
2017-09-15闫法领史景飞王大庆高理富
闫法领,史景飞,王大庆,高理富
(1.中国科学院合肥智能机械研究所,合肥 230031;2.中国科学技术大学自动化系,合肥 230027)
农作物表型快速检测移动机器人系统及其主梁有限元分析
闫法领1,2,史景飞1,2,王大庆1,2,高理富1
(1.中国科学院合肥智能机械研究所,合肥 230031;2.中国科学技术大学自动化系,合肥 230027)
针对育种领域对农作物表型快速检测移动机器人的迫切需求,介绍了一种育种表型快速检测移动机器人的主要系统构成。通过三维移动平台重复定位精度实验,验证了移动平台的重复定位性能,并给出了主梁的有限元分析,验证了主梁设计的合理性,为机载设备快速检测农作物的表型特征参数提供移动作业平台,解决快速采集大量农作物表型参数所需的移动平台问题。
快速检测;三维移动平台;重复定位精度;有限元分析
0 引言
农作物表型检测是育种过程中的一项重要任务,主要检测农作物的表型特征参数,如农作物株型、株高、叶绿素及其成分含量等,具有采样点数多、数据量大等特点。目前的检测方式主要是人工完成,工作效率低,工人劳动强度大[1]。由于农作物生长具有季节性,致使人工检测的数据偏少,不能全面反映农作物表型的总体水平,给育种专家全面掌握种子的性能造成了困难,因此植物表型自动检测技术在农业研究和作物育种的过程中将发挥重要作用[2]。
农作物表型快速检测移动机器人系统就是利用机器人技术,为农作物表型参数检测仪器提供移动作业平台,解决快速检测的平台问题,这也是21世纪农业机械化的重要发展趋势[3]。本文介绍了育种表型快速检测移动机器人的系统构成,分析了主梁的有限元特性,并通过实验,验证了系统设计的合理性。
1 农作物表型快速检测移动机器人系统介绍
1.1 总体结构
表型快速检测移动机器人本体由大范围三维移动平台和数据采样系统两部分组成。大范围三维移动平台主要包括门架、升降移动平台、运行机构和电气系统等四个主要部分,数据采样系统主要由六自由度操作机器人和摄像机系统构成,如图1所示。

图1 表型快速检测移动机器人本体
1.2 工作原理
当育种专家需要获取表型特征参数时,若这些参数是非接触式(如农作物株高、株型、病虫害情况等)获取,只需将所需仪器挂载在移动平台上,将移动平台移动至所需检测农作物上方,然后通过对农作物株高、株型检测仪、病虫害检测仪的读取,即可获得所需参数,若所需检测参数是接触式的(如农作物叶绿素含量、光合作用情况等),此时需要通过安装在六自由度机器人上的摄像头,对农作物的叶片先进行定位,然后再通过机械臂上的末端夹持器进行采样,然后再检测,获取所需参数。
1.3 主要技术参数
根据安徽龙亢农场育种用地的实际情况和基金设计任务要求,大范围三维移动平台采用门式结构,分段式设计,尺寸为20m*30m,移动平台具有200Kg负载能力,可以搭载多种检测设备(多光谱成像仪、叶绿素检测仪,病虫害检测仪等),其控制系统具有手工和自动行走两种工作模式,有良好的用户操作接口。设计性能参数及指标如表1所示。
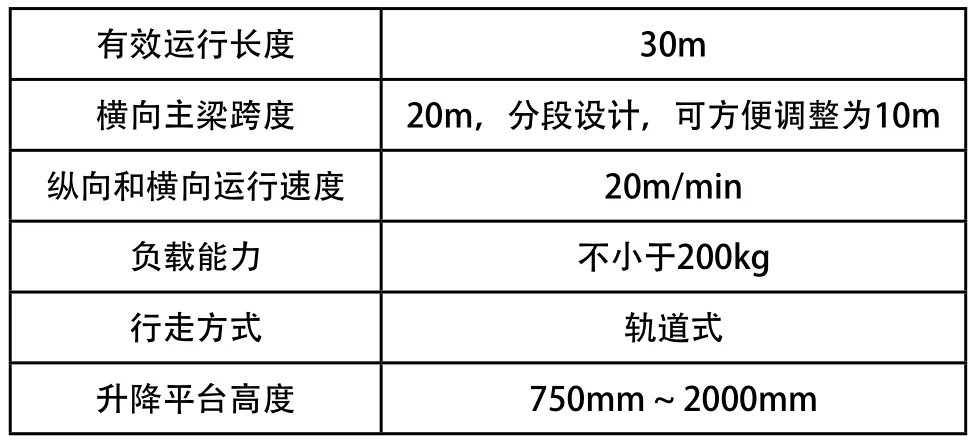
表1 大范围三维移动平台设计参数
2 主要工作部件
2.1 升降移动平台
升降移动平台的作用是将检测仪器定位到感兴趣的检测点,可以精确定位到指定的位置坐标。移动平台上面装有小车运行机构,可沿主梁行走,也可进行上下移动,升降移动平台的末端是一安装平台,在平台上可以安装用以进行农作物表型快速检测的各种仪器以及机械臂,用以进行植物表型参数的快速检测。
2.2 大车运行机构
大车运行机构的作用是使升降系统整体沿轨道运行。其由电机、减速器、制动器、联轴器和车轮组组成,车轮组在门机两侧对称布置。大车运行机构采用“三合一”驱动装置,电机、制动器和减速器作成一体。
2.3 电气系统
电气系统控制电机按照预期目标运行,设有短路、失压、过流等安全保护装置。系统运行、起升机构均装有行程限位开关,以限制各机构的运动行程。当限位开关断开后,相应的电路被切断,机构停止运转。两次接通电源时,机构只能向相反方向运转,从而保障了安全。
2.4 六自由度操作机器人
本实验所使用的六自由度操作机器人系埃夫特智能装备有限公司的ER6C60的通用型6R工业机器人。前三个关节确定手腕的位置,后三个关节确定手腕的方位。通过上位机将摄像头获得叶片的位置信息发送给机械臂控制器,然后机械臂通过末端夹持器,进行农作物的快速取样与检测。
3 大范围三维移动平台重复定位精度实验
由于本实验平台主要用于精准农业中农作物表型快速检测,而对于同一颗植物的采样,需要在不同时间进行多次采样,因此能够准确、快速找到需要重复采样的植物,对于实验,有着很重要的作用。其中六自由度机械臂的重复定位精度是0.02mm,移动平台误差主要来源于三维移动平台,因此我们实验所做的重复定位精度主要做的是大范围三维移动平台的重复定位精度实验。
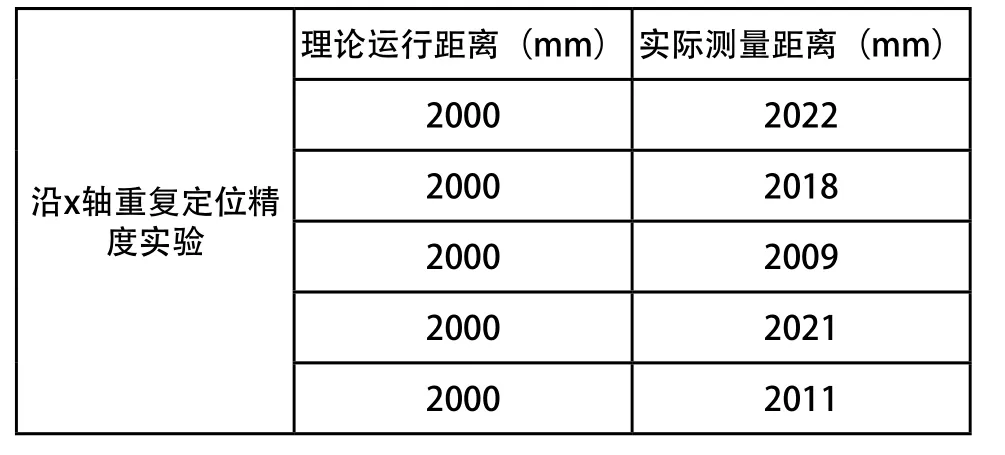
实验时,我们移动平台沿x,y,z轴各运行2000mm,3000mm,1000mm。每组数据采样5次。
?
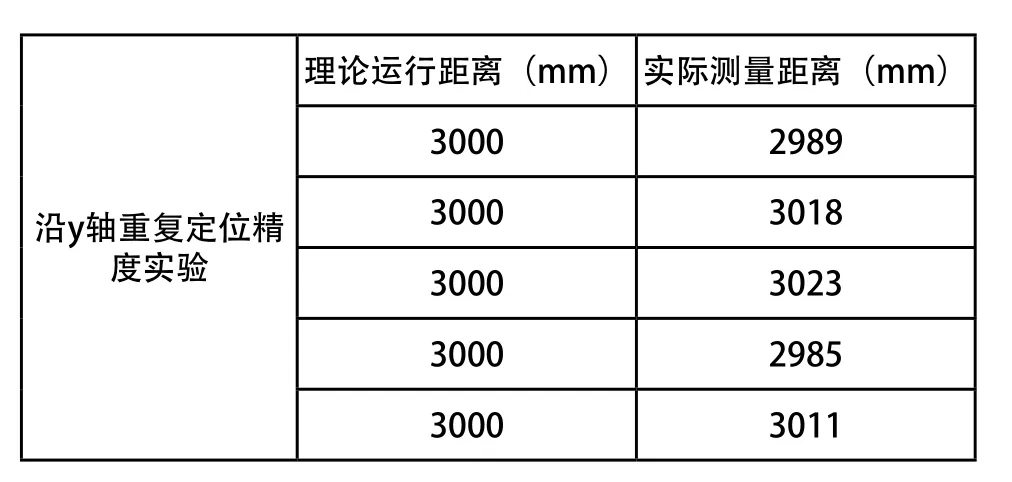
理论运行距离(m m)实际测量距离(m m)3 0 0 0 2 9 8 9 3 0 0 0 3 0 1 8 3 0 0 0 3 0 2 3 3 0 0 0 2 9 8 5 3 0 0 0 3 0 1 1沿y轴重复定位精度实验
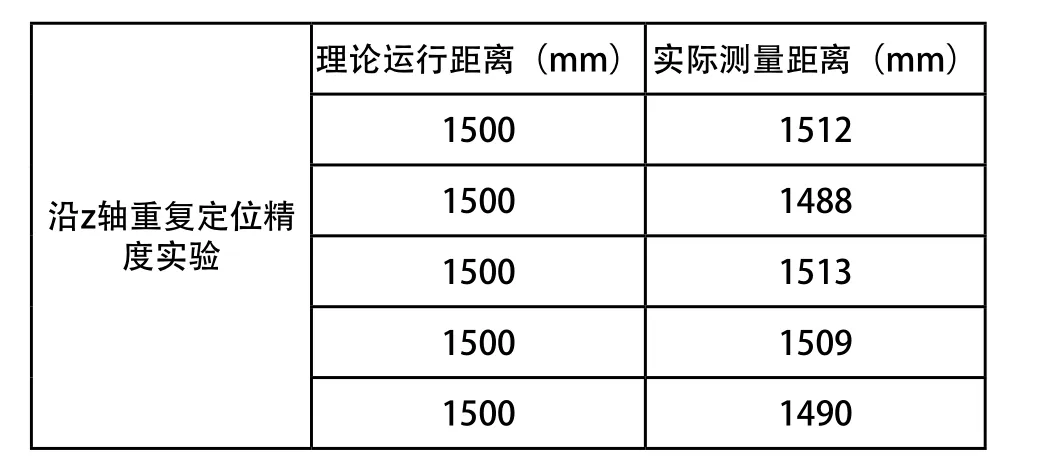
理论运行距离(mm)实际测量距离(mm)1500 1512 1500 1488 1500 1513 1500 1509 1500 1490沿z轴重复定位精度实验
由重复定位实验数据,在x,y,z,三方向上,最大移动误差为32mm,在我们设计表型参数快速检测定位机构时,要求其粗定位精度小于40mm,实验数据表明满足设计要求。
4 主梁设计合理性的有限元验证
4.1 主梁三维模型的建立
根据主梁的设计图纸,采用pro/e建立三维模型。其中主梁各板材之间连接均为焊接。材料为Q235B,其杨氏模量2.1 e11,泊松比0.3。
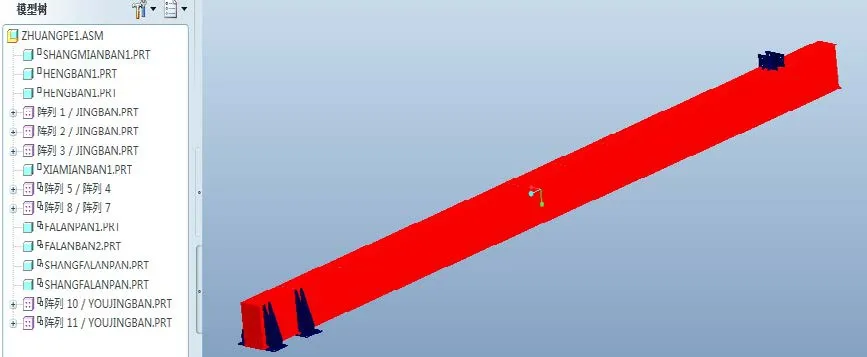
图2 主梁三维模型图
4.2 主梁工况分析
主梁在进行静力学分析时,应选取梁在实际工况中有可能面临最不利的工况,来分析各结构的应变和应力, 以检验主梁的刚度和强度是否满足设计要求[4,5]。主梁由于是两端固定,其最坏工况就是当升降平台运行到梁的跨中位[6]置且负载最大时,此时主梁变形与受力最大。因此本文选用当运行平台在梁的跨中时进行有限元分析验证。
主梁设计参考钢结构设计规范[7],根据结构钢设计规范,主梁垂直静挠度f与主梁跨度L间的关系为:

4.3 主梁的有限元分析
有限元分析采用ANSYS workbench进行,Workbench 利用ANSYS 计算内核,具有装配体自动分析、自动网格划分、快捷的参数优化工具,为设计者提供了极大的便利[8]。
首先进行主梁的网格划分,采用自动划分法对装配体进行网格划分。自动划分法就是自动设置四面体或扫掠网格划分,如果几何体不能被扫掠,程序自动生成四面体,反之则产生六面体[9]。网格划分的优劣直接影响着分析的结果,节点30464个,基本单元15992个。
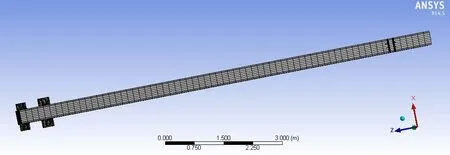
图3 主梁网格划分图
完成主梁的边界条件设置,力施加后,对主梁进行静力分析。梁为有限元分析的主体,因此在后处理过程中只显示主梁的变形和应力云图这样能够简化分析结果,突出重点[10]。主梁的变形图如图4所示,应力图如图5所示。
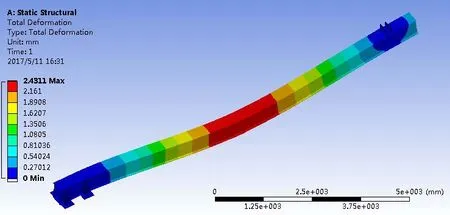
图4 主梁应变形图
由图可知,挠度最大处于跨中处,此时主梁挠度大约为2.4311mm,远小于设计规范的12.5mm,因此完全符合设计要求。

图5 主梁应力图
由应力图,可以看出,梁所受最大应力约52.524MPa,小于Q235B钢的屈服极限应力235MPa,完全符合设计要求。
这里挠度和应力都有较大的安全余量,主要是因为我们在进行主梁设计时,考虑到移动平台主要用于实验,在以后的试验中可能会采用别的升降方式,使主梁受到更大的力,因此在主梁设计时,预留了很大的安全余量。
5 结论
本文介绍了我们研制的育种表型快速检测移动机器人的系统构成,该系统的研制是为了满足育种过程中农作物表型快速检测的需求,解决快速采集大量农作物表型参数的自动化平台问题。在系统介绍的基础上,通过实验和有限元分析,验证了系统设计的合理性。
[1] 段凌凤,杨万能.水稻表型组学研究概况和展望[J].生命科学,2016,28(10):1129-1137.
[2] 方伟,冯慧,杨万能,刘谦,表型检测中用于小麦株型研究的快速三维重建方 法[J].中国农业科技导报,2016,18(2):95-101.
[3] 李玉林,崔振德,张园,李明福,罗文杨,葛畅,中国农业机器人的应用及发展现状[J].热带农业工程,2014,38(4):30-33.
[4] 王伟璋,起重机金属结构加劲薄板承载能力的试验研究与仿真分析[D].上海:上海海事大学物流工程学院,2005.
[5] 周平槐,大跨度箱形变截面钢拱结构的受力性能研究[D].杭州:浙江大学机械与能源工程学院,2005.
[6] 刘金萍,龙门吊结构有限元分析[J].山西电子技术,2014,6;18-19.
[7] 《钢结构设计规范》编制组, 钢结构设计规范应用讲解[M].北京:中国计划出版社,2003.
[8] 查太东,杨萍,基于ANSYS Workbench 的固定支架优化设计[J].煤矿机械2012,33(2):28-30.
[9] 张海波,张瑞军,常影.基于ANSYS的汽车悬架控制臂有限元分析[J].组合机床与自动化加工技术,2014,3:151-155.
[10] 周孜亮,王贵飞,丛明.基于ANSYS Workbench 的主轴箱有限元分析及优 化设计[J].组合机床与自动化加工技术,2014,3:17-20.
A robot system for crop phenotype detection and the analysis of the main beam
YAN Fa-ling1,2, SHI Jing-fei1,2, WANG Da-qing1,2, GAO Li-fu1
TP242.2
:A
:1009-0134(2017)08-0067-04
2017-06-20
高通量育种作物本体与环境快速检测装置(Y622A21291);中国科学院战略性先导科技专项基金(XDA08040109);安徽省对外科技合作项目(1503062026)
闫法领(1989 -),男,安徽阜阳人,硕士,研究方向为机器人。
