基于自然驾驶数据的危险评估算法研究∗
2017-09-15朱西产沈剑平
吴 斌,朱西产,沈剑平,李 霖
基于自然驾驶数据的危险评估算法研究∗
吴 斌1,2,朱西产1,沈剑平2,李 霖3
(1.同济大学汽车学院,上海 201804;2.国家机动车产品质量监督检验中心(上海),上海 201805;3.上海国际汽车城(集团)有限公司,上海 201805)
本文中提出了一种基于自然驾驶数据的汽车碰撞危险评估算法。首先分析了在自然驾驶工况下的驾驶员制动和转向的输入特性,研究了表征驾驶员的制动避撞和转向避撞紧急程度的行为特征参数,建立了紧急制动和紧急转向的驾驶员数学模型;在此基础上,分析了不同车速下制动避撞和转向避撞的特征,提出了基于自然驾驶数据的危险评估算法。仿真结果表明,本文中提出的危险评估算法可同时兼顾制动避撞和转向避撞,并与驾驶员在真实交通环境下的紧急避撞行为相对应,可用于汽车避撞系统控制策略的开发。
自然驾驶数据;紧急避撞;驾驶员行为;危险评估
前言
汽车碰撞危险估计是指通过分析当前驾驶环境,估计本车及周围驾驶环境的未来变化,判断车辆的潜在碰撞危险程度。危险估计算法是智能汽车安全系统制定控制策略的基础,决定了系统发出预警或主动干预的时刻及可靠性。
目前主要有两类危险估计算法:确定性算法和概率性算法。其中,概率性算法通过计算本车与不同目标发生碰撞的概率分布来估算危险程度,该方法用于复杂的交通环境,能够考虑多个目标之间的相互作用,但计算量巨大,目前还处在研究中[1]。确定性危险估计方法具有计算效率高、便于开发控制策略等优点,从而得到广泛应用。文献[2]中对于确定性危险估计算法的表征参数进行了总结,并将这些参数分成基于时间、基于距离和基于减速度3类。文献[3]中对于时间等各种估计测量参数进行了分析和比较。文献[4]中通过实际交通工况数据对基于距离的危险估计算法与TTC(time-to-collision,两车相对距离与相对速度计算得到的碰撞时间)进行了评价和比较。应用比较广泛的危险估算方法,主要集中在纵向碰撞预警策略,如Mazda模型、Honda模型、伯克利模型和Jaguar模型等。但是,目前这些模型未能充分考虑我国驾驶员的行为特征,且无法同时兼容考虑转向避撞的可行性。
本文中提出了一种基于我国自然驾驶工况的汽车碰撞危险估计算法。分析了在自然驾驶工况下驾驶员的制动和转向避撞行为特征,建立了驾驶员紧急制动和转向的数学模型;在此基础上,提出了基于我国自然驾驶工况的危险估计算法,对汽车碰撞的危险区域进行分级划分。
1 自然驾驶工况的数据采集
为了研究驾驶员在真实交通环境中的驾驶行为,本文中所使用的数据全部来自中国大型实车路试(China field operational test,China FOT)的先行实验China-Pilot FOT。所有实验车都统一安装了数据采集设备,包括4个摄像头,全面记录驾驶过程中驾驶员操作信息和道路环境信息,如图1所示。在为期2个月的数据采集中,收集了来自不同驾驶员的160个驾驶片段,得到5 600min的自然驾驶数据。

图1 自然驾驶工况的采集
2 驾驶行为输入特性的研究
对于自动驾驶辅助系统,核心问题是确定合适的介入时刻以达到安全效用和用户接受度的最优化。传统的危险估计算法中大多以车辆物理极限来定义碰撞无法避免时刻,但这种方法并不是最为合理。故本文中引入驾驶员行为数据,通过制动和转向参数来定义工况的避撞操作的紧急程度,作为危险估计算法的输入。
2.1 驾驶员的制动输入特性
在研究驾驶员的制动输入特性时,本文中利用制动减速度和制动减速度梯度来表征制动工况操作紧急程度。
图2为自然驾驶工况下车辆的纵向加速度随速度变化的分布图,负值为制动减速度,表征了制动的强烈程度,代表了驾驶员在危险工况下对车辆制动力的利用水平。通过统计分析,自然驾驶工况中95%的驾驶员利用的最大制动减速度绝对值小于5m/s2;99%的驾驶员利用的最大制动减速度绝对值小于6m/s2;驾驶员最大的制动减速度为8m/s2,与地面的最大附着力相关。
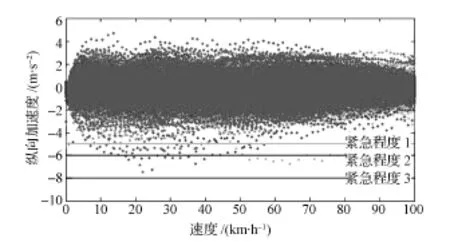
图2 纵向加速度随速度变化的分布图
纵向制动减速度梯度是指制动时减速度值的上升快慢,反映驾驶员踩制动踏板的速度,也是驾驶员对碰撞危险感知的直观反应。图3为自然驾驶工况下车辆纵向加速度梯度随速度变化的分布图,负值为制动减速度梯度。通过统计,在自然驾驶工况中95%可操作的最大制动减速度梯度小于10m/s3;99%的可操作的最大制动减速度梯度小于15m/s3;驾驶员可操作的最大制动减速度梯度为20m/s3。
利用制动减速度和制动减速度梯度来表达制动操作的紧急程度,根据上述分析将制动操作紧急程度分成3级,如表1所示。
2.2 驾驶员的转向输入特性
在研究驾驶员的转向输入特性时,侧向加速度、侧向加速度梯度、转向盘转角输入、转向盘转速等参数都与驾驶员的转向行为密切相关。其中转向盘转角输入和转向盘转速与驾驶员转向输入线性相关,故选取转向盘转速作为驾驶员转向操作剧烈程度的参数;同时考虑转向过程中,车辆对地面附着力利用程度,故选取侧向加速度作为转向强烈程度的参数。
图4为驾驶员的侧向加速度随速度变化的分布图,图中紧急程度1、紧急程度2和紧急程度3分别表示95%,99%范围线和最大侧向加速度线。
转向侧向加速度随速度变化比较明显:车速在40~80 km/h之间时,驾驶员使用的侧向加速度较大;车速小于40km/h和大于80km/h时,驾驶员使用的侧向加速度明显降低。
图5为驾驶员转向盘角速度随车速的变化分布图,图中紧急程度1、紧急程度2和紧急程度3分别表示95%,99%范围线和最大转向盘角速度线。随着车速的增加,转向盘角速度逐渐减小。在较低车速行驶时,驾驶员倾向于大幅度转向盘转角和角速度进行转向避撞;在较高车速行驶时,驾驶员倾向于小幅度转向盘转角和角速度进行转向避撞。
利用侧向加速度和转向盘角速度来表达转向工况的操作紧急程度,将转向操作紧急程度分成3级,如表2所示。
3 驾驶员紧急制动和转向模型建立
在驾驶过程中车辆受驾驶员控制,在某些工况下车辆运动虽然从车辆动力学上是可行的,但驾驶员通过操作实现这种车辆运动的可能性很低。本节利用自然驾驶工况数据,分析驾驶员紧急工况下的制动转向行为特征,并建立相应的驾驶员数学模型,作为危险估算方法的输入,可提高算法的安全效用。

表2 转向操作紧急程度的划分
3.1 驾驶员紧急制动模型的建立
以表1中的紧急程度1最大制动减速度绝对值>5m/s2、最大制动减速度梯度绝对值>10m/s3为筛选阈值,并结合视频录像筛选出制动危险工况400多例。紧急制动工况下驾驶员遵循的原则是保证驾驶的平顺性,即紧急制动是不断调整优化控制的过程,符合人体行为学规律,优化目标为

式中j(t)为制动减速度梯度。利用五次多项式来表示制动过程中的车辆纵向位移变化S(t),并推导出其他运动参数:

假设车辆初始状态:S(0)=0,v(0)=v0,a(0)=a0;车辆的最终状态:S(T)=Sf,v(T)=vf,a(T)=0;其中T为紧急制动的时间,将车辆的初始状态和最终状态代入多项式表征的运动参量中,可求解出五项式系数的表达式。
约束条件:(1)避免碰撞的发生,以目标车静止的追尾工况为例,如图6所示约束条件为Sf<D;(2)最大制动减速度绝对值小于8m/s2。

图6 制动工况约束条件的示意图
通过优化算法可最终计算出车辆的运动状态参量。为了验证上述驾驶员紧急制动数学模型的有效性,随机选取2个驾驶员紧急制动工况进行拟合,图7和图8分别为制动工况1#的拟合情况(两车的相对车速为28km/h,碰撞时间TTC=0.8s),图9和图10为制动工况2#的拟合情况(两车的相对速度为54km/h,TTC=1.8s)。
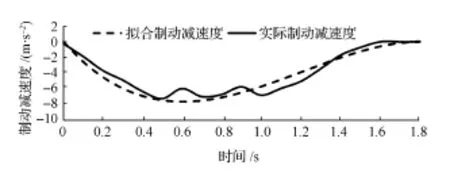
图7 制动工况1#的制动减速度曲线

图8 制动工况1#的制动减速度梯度曲线
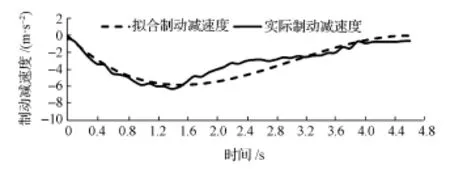
图9 制动工况2#的制动减速度曲线
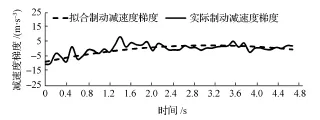
图10 制动工况2#的制动减速度梯度曲线
通过对比,建立的驾驶员紧急制动模型可以很好地复现驾驶员在紧急工况下的制动操作。
3.2 驾驶员紧急转向模型的建立
对紧急转向避撞变道过程进行分析,如图11所示,整个紧急转向变道过程可分成3个阶段:避撞阶段、侧移阶段以及稳定阶段。本文中研究集中在避撞阶段(从驾驶员开始转向避撞行为的时刻T0开始,以转向盘转角达到最大值的时刻T1为终点)的转向行为。

图11 紧急转向变道避撞阶段划分
为了研究避撞阶段驾驶员紧急转向特征,图12为33例紧急变道工况避撞阶段的转向盘最高角速度和转向盘转角变化的线性关系图,线性相关系数为0.98,线性比例约为2.21。

图12 转向盘最高角速度和转角的线性关系
上述线性关系表明,避撞阶段的驾驶员紧急转向避撞可用开环模型来表示,本文中利用高斯函数建立转向盘角速度的表达式为


驾驶员在紧急转向变道的避撞阶段,同样是以保证转向稳定性,优化目标为

上已述及,驾驶员的转向盘角速度可通过高斯函数来表达;而利用车辆自行车模型,可以推导车身的其他运动状态参量。
不失一般性,考虑图13所示将两车都视作相同大小矩形,有如下两个约束条件。

图13 紧急转向避撞的示意图
(1)避免与前方障碍物发生碰撞,如图13所示,以向左转向避撞为例,在本车通过目标车时,目标车左后角点(x0,y0)到本车右侧边界距离大于一定的安全距离Dsm,即

式中:c为本车右侧边界所在直线斜率,c=tan(ϕ);(xrf,yrf)为本车矩形边界的右上顶点,可对车身的状态参数进行推导。
(2)紧急转向的最大侧向加速度绝对值小于6m/s2。
通过优化算法可最终计算出车辆的运动状态参量。为了验证上述驾驶员紧急转向数学模型的有效性,随机选取2个驾驶员紧急转向工况进行拟合,图14为转向工况1#的拟合情况(两车的相对车速为57km/h,TTC=1.35s),图15为转向工况2#的拟合情况(两车的相对速度为70km/h,TTC=1.3s)。通过对比可知,建立的驾驶员紧急转向模型可以很好地复现驾驶员在紧急工况下的转向操作。
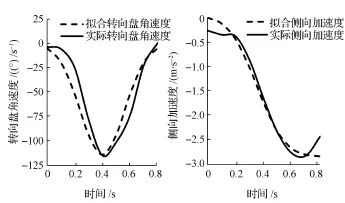
图14 转向工况1#的转向盘角速度和侧向加速度曲线

图15 转向工况2#的转向盘角速度和侧向加速度曲线
4 危险估计算法的研究
本文中以目标车静止、后车追尾的工况为例,进行危险估计算法的研究。通过上节驾驶员紧急制动和转向模型,可模拟出从车辆初始危险状态到安全状态的驾驶员紧急操作。模型预测的驾驶员参考操作,可判断该操作是否超出了驾驶员正常驾驶的可行域范围,并通过表1和表2中的表征制动和转向操作紧急程度的阈值参数来估计目前车辆行驶状态的危险程度。
根据文献[6]和文献[7]中的研究成果,驾驶员的紧急操作行为与TTC倒数TTC-1相关,本文中采用TTC-1进行危险估计的分析。以本车30和70km/h速度接近静止的目标车为例进行计算,表3为达到表1中制动操作紧急程度1~3条件下的紧急制动工况。

表3 达到表1的紧急程度_1~3条件的紧急制动工况
图16和图17为30与70km/h情况下,不同工况下模拟车辆紧急制动减速度和制动减速度梯度的模拟曲线,分别为达到表1中制动操作紧急程度的3个等级的工况操作曲线。

图16 70km/h车速下各工况的制动减速度和梯度曲线
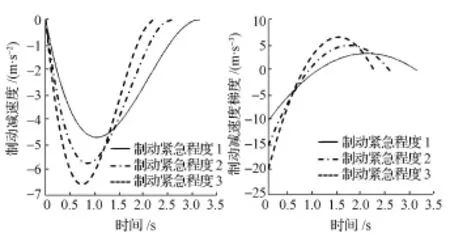
图17 30km/h车速下各工况的制动减速度和梯度曲线
随着TTC-1增加,两车之间的距离D减少,车辆最大制动减速度及其梯度的绝对值都逐渐变大,危险等级不断增加。进一步分析可知,在低速情况下危险程度主要受最大制动减速度梯度的影响,在高速情况下危险程度主要是受最大制动减速度的影响。
用同样的方法分析两种车速下紧急转向的驾驶行为,表4示出达到表2中的操作紧急程度1~3条件下的紧急转向工况。

表4 达到表2的紧急程度_1~3条件的紧急转向工况
图18和图19为在表4中不同工况下自车转向盘角速度和侧向加速度的模拟曲线。分别为达到表2中转向操作紧急程度的3个等级的工况操作曲线。

图18 70km/h各工况的转向盘角速度和侧向加速度曲线
通过分析随着TTC-1的不断增加,相对距离不断减少,所需的转向盘最高角速度和车辆最大侧向加速度不断增加,紧急转向危险程度也不断增加。

图19 30km/h各工况的转向盘角速度和侧向加速度曲线
综合比较紧急制动和紧急转向操作,在速度为70km/h时,紧急转向避撞所需的纵向距离更小;在低速30km/h时,制动避撞所需的纵向距离更小。
为了更好地说明制动和转向操作在不同车速下的区别,以最高操作紧急等级紧急程度3作为约束条件,计算并对比紧急制动和转向的临界避撞TTC-1,如图20所示。
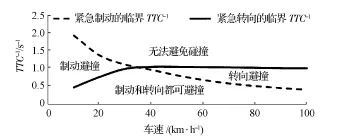
图20 紧急制动和转向的临界TTC-1曲线
在相对车速较高(大于40km/h)时,转向避撞的临界TTC-1更高,说明此时虽然制动无法避免碰撞,但通过转向还能够避免碰撞,因此紧急转向避撞在相对车速较高时相比于紧急制动可以提供更好的避撞效果。而在相对车速较低(小于40km/h)时,紧急制动相对于紧急转向避撞可以提供更好的避撞效果。
通过驾驶员紧急工况的制动转向模型,分别估算紧急制动和转向操作,并通过制动和转向紧急程度的参数来估计目前车辆行驶状态的危险程度。利用表1和表2建立的制动和转向操作不同紧急程度的划分,分别计算不同车速在不同危险等级下的临界TTC-1值,图21为不同车速下紧急制动和紧急转向的临界TTC-1值的曲线图。

图21 制动和转向操作不同紧急程度的临界TTC-1曲线
根据上述研究,结合图21,在速度较低(小于40km/h)时,紧急制动有更好的避撞效果,故本文中危险估计算法在低速情况下以紧急制动的临界TTC-1作为危险等级区域划分的依据;在速度较高(大于40km/h)时,紧急转向有更好的避撞效果,且随着车速增加驾驶员通过转向避撞有增多的趋势,故在高速阶段以紧急转向的临界TTC-1作为危险等级区域划分的依据,同时考虑到高速阶段发生碰撞的危险程度较高,故增加两档以紧急制动的临界TTC-1来划分的危险等级。最终基于自然驾驶工况的危险估计算法的区域划分如图22所示。
由图22可见,按照TTC-1与车速的关系划分危险等级区域。I0区域,未能检测到碰撞发生的危险;I1区域,碰撞危险程度低,提示驾驶员进行制动或转向来避撞;I2区域,碰撞危险程度低,提示驾驶员进行转向来避撞;II区域,危险程度较高,一级预警;III区域,危险等级极高,二级预警;IV区域,碰撞危险极高,碰撞即将发生甚至无法避免。

图22 基于自然驾驶工况的危险估计的区域划分
5 结论
本文中基于我国自然驾驶工况数据,提出了一种汽车碰撞危险估计算法。首先分析了紧急制动和转向的驾驶员输入特性,对紧急操作的等级进行了划分;筛选了紧急工况,建立了驾驶员紧急制动和转向的驾驶员模型,并进行了验证。通过驾驶员模型,并结合制动和转向操作的紧急程度,分析了不同速度下驾驶员的紧急制动和转向避撞操作的特征。结果表明,在低速阶段紧急制动操作所需避撞的纵向距离小,而在高速阶段紧急转向操作的避撞效果更好。结合不同速度情况下的避撞特征,提出了汽车碰撞危险估计算法,以TTC-1作为危险等级的参数,对汽车碰撞的危险程度进行分级区域的划分。
本文中建立的危险估计算法中的阈值是基于自然驾驶工况中的数据,与我国驾驶员驾驶行为特征相符,并同时考虑制动和转向两种避撞措施,可用于设计针对我国用户的汽车避撞系统。
[1] EIDEHALL A.Tracking and threat assessment for automotive collision avoidance[D].Linkoping:Department of Electrical Engineering of Linkoping University,2007.
[2] ZHANG Y,ANTONSSON E K,GROTE K.A new threat assessment measure for collision avoidance systems[C].Proceeding of the IEEE ITSC 2006.Toronto:IEEE Press,2006:968-975.
[3] KITAJIMA S,MARUMO Y,HIRAOKA T,et al.Comparison of evaluation indices concerning estimation of driver's risk perceptionrisk perception of rear-end collision to a preceding vehicle[J].Review of Automotive Engineering,2009,30(2):191.
[4] LEE K,PENG H.Evaluation of automotive forward collision warning and collision avoidance algorithms[J].Vehicle System Dynamics,2005,43(10):735.
[5] NAJM W G,SMITH J D,YANAGISAWA M.Pre-crash scenario typology for crash avoidance research[R].Washington,DC:National Highway Traffic Safety Administration,2007.
[6] MOON S,YI K.Human driving data-based design of a vehicle adaptive cruise control algorithm[J].Vehicle System Dynamics,2008,46(8):661.
[7] KIEFER R J,LEBLANC D J,FLANNAGAN C A.Developing an inverse time-to-collision crash alert timing approach based on drivers last-second braking and steering judgments[J].Accident Analysis&Prevention,2005,37(2):295.
[8] BIRAL F,LIO M D,LOT R,et al.Vehicle and driver modeling and threat assessment for driving support functions[C].Atti XX Congresso dell’Associazione Italiana di Meccanica Teorica e Applicata,2011.
[9] MATTIAS M,COELINGH E,et al.Model-based threat assessment for avoiding arbitrary vehicle collisions[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(3):658-669.
[10] BROWN T L,LEE J D,MCGEHEE D V.Human performance models and rear-end collision avoidance algorithms[J].Human Factors: The Journal of the Human Factors and Ergonomics Society,2001,43(3):462.
[11] BERTOLAZZI E,BIRAL F,LIO M D,et al.Supporting drivers in keeping safe speed and safe distance:The SASPENCE subproject within the european framework programme 6 integrating project PReVENT[J].Intelligent Transportation Systems IEEE Transactions on,2010,11(3):525-538.
[12] KIEFER R J,CASSAR M T,FLANNAGAN C A,et al.Forward collision warning requirements project final report-task 1[R]. Washington D C:National Highway Traffic Safety Administration,2003.
[13] HUGEMANN D W,NICKEL D M,MORAWSKI I,et al.Longitudinal and lateral accelerations in normal day driving[C].The 6thInternational Conference of The Institute of Traffic Accident Investigators.London:The Institute of Traffic Accident Investigator,2003:1-8.
[14] BRACKSTONE M,MCDONALD M.Driver headway:how close is too close on a motorway?[J].Ergonomics,2007,50(8): 1183.
[15] HIRAOKA T,TANAKA M,KUMAMOTO H,et al.Collision risk evaluation index based on deceleration for collision avoidance (First Report)[J].Review of Automotive Engineering,2009,30 (4):429.
A Study on Risk Assessment Algorithm Based on Natural Driving Data
Wu Bin1,2,Zhu Xichan1,Shen Jianping2&Li Lin3
1.College of Automotive Studies,Tongji University,Shanghai 201804;2.National Center of Supervision and Inspection on Motor Vehicle Products Quality(Shanghai),Shanghai 201805;3.Shanghai International Automobile City(Group)Co.Ltd.,Shanghai 201805
A vehicle collision risk assessment algorithm based on natural driving data.is proposed in this paper.Firstly the driver input characteristics for braking and steering under natural driving condition are analyzed,the feature parameters of driver behavior characterizing the emergency extent of collision avoidance by braking and by steering are studied,and the driver models for emergency braking and emergency steering are established.Then on this basis,the features of collision avoidance by braking and by steering are analyzed.Finally a risk assessment algorithm based on natural driving data is proposed.The simulation results show that the risk assessment algorithm proposed can concurrently consider collision avoidance by both braking and steering and correspond to emergency collision avoidance behavior of driver under real traffic environment,so can be used for the development of control strategy for vehicle collision avoidance system.
natural driving data;collision avoidance;driver behavior;risk assessment
10.19562/j.chinasae.qcgc.2017.08.009
∗上海市科委研发平台项目(16DZ2291000)资助。
原稿收到日期为2016年11月23日,修改稿收到日期为2017年2月16日。
朱西产,教授,博士生导师,E-mail:xczhu@163.com。
