混合动力汽车耦合装置闭锁离合器动力学分析
2017-09-12周之光刘永刚
黄 东,周之光,刘永刚,景 枫,赵 军
(1.奇瑞汽车股份有限公司, 安徽 芜湖 241006; 2.重庆大学 汽车工程学院, 重庆 400044;3.重庆理工大学, 重庆 400054)
混合动力汽车耦合装置闭锁离合器动力学分析
黄 东1,周之光1,刘永刚2,景 枫1,赵 军3
(1.奇瑞汽车股份有限公司, 安徽 芜湖 241006; 2.重庆大学 汽车工程学院, 重庆 400044;3.重庆理工大学, 重庆 400054)
并联式混合动力汽车耦合装置是混合动力汽车的关键部件,其性能决定了模式切换过程的平顺性和快捷性。而闭锁离合器的设计开发是混合动力耦合装置的难点之一。研究了混合动力汽车耦合装置闭锁离合器动力学特性,通过对混合动力汽车工作模式进行分析,并结合行星轮的动力学特性、行星轮杠杆受力分析图,推导出行星轮闭锁离合器的力矩计算公式,提出了混合动力耦合装置闭锁离合器设计准则,为闭锁离合器设计提供了必要的理论依据。
混合动力汽车;耦合机构;闭锁离合器
随着全球能源危机和温室效应的日益严重,混合动力汽车的发展越来越受到重视。目前混合动力汽车的耦合系统主流构型主要有P2构型和行星轮动力分流构型,在行星轮动力分流构型的混合动力耦合装置中,多数匹配闭锁离合器用以实现不同工作模式之间的切换。闭锁离合器的设计开发属于混合动力耦合装置的难点之一,核心技术基本掌握在国外核心专家手中,国内鲜有闭锁离合器的设计资料及经验。
杜波等[1]对基于行星齿轮机构的新型并联式混合动力系统工作模式及能量分配策略进行了研究,但未对闭锁离合器的力矩容量进行分析,具有一定的局限性。肖敏[2]对行星齿轮变速箱闭锁离合器摩擦力矩的计算进行了研究,其未应用于行星轮式混合动力系统闭锁离合器力矩的设计,缺乏针对性。伊海霞等[3]对混合动力用行星轮耦合机构的转速与转矩特性进行了动力学分析。刘钊等[4]用杠杆模拟法建立了行星变速器的转速、转矩动力学模型,未对闭锁离合器的力矩容量进行推导。
本文通过对混合动力汽车工作模式进行研究,并结合行星轮的动力学特性、行星轮杠杆受力分析图,推导出行星轮闭锁离合器的力矩计算公式,提出了混合动力耦合装置闭锁离合器设计准则,为闭锁离合器设计提供了必要的理论依据。
1 不同工作模式下闭锁离合器扭矩求解
某款混合动力汽车耦合装置采用单排行星齿轮机构,形式如图1所示。行星齿轮机构主要由太阳轮、行星齿轮、行星架及齿圈构成,所述的行星齿轮机构太阳轮轴和齿圈轴作为力矩输入轴,行星架轴作为力矩输出轴。从图1中可知:发动机与太阳轮相连并互传动力、电机与齿圈相连并互传动力、行星架与变速器输入轴相连并互传动力。在齿圈和行星架间设置了闭锁离合器,同时,为防止纯电动驱动模式下发动机出现反转,可在太阳轮与壳体间设置制动器或单向离合器;通过离合器和制动器的分离或接合的状态组合,可实现混合动力车辆的纯电动行驶、发动机驱动、并联驱动、行驶中启动发动机以及制动能量回收等功能模式。
在行星机构的设计计算时,为了确定传动件计算载荷和闭锁离合器设计容量,要对该系统进行动力学的分析和计算。其中,闭锁离合器摩擦力矩的计算是重要的内容之一[2]。
混合动力耦合装置的不同工作模式下的各部件工作状态见表1。
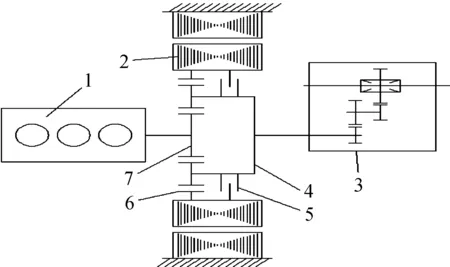
1.发动机;2.电机;3.变速器;4.行星架;5.闭锁离合器;6.齿圈;7.太阳轮
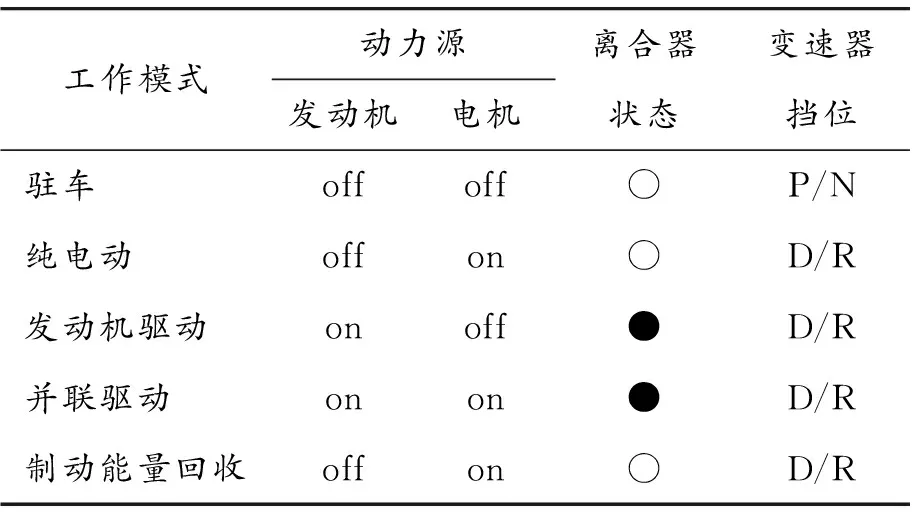
工作模式动力源发动机电机离合器状态变速器挡位驻车offoff○P/N纯电动offon○D/R发动机驱动onoff●D/R并联驱动onon●D/R制动能量回收offon○D/R
○:分离; ●:接合
根据行星齿轮动力学特性及行星轮杠杆分析法可得图2,由图2得出太阳轮、齿圈、行星架之间的力矩关系式如下:

(1)
TC=TS+Tr
(2)
式中:Ts、Zs分别表示太阳轮力矩及对应齿数;Tr、Zr分别表示齿圈力矩及对应齿数;TC分别表示行星架力矩。
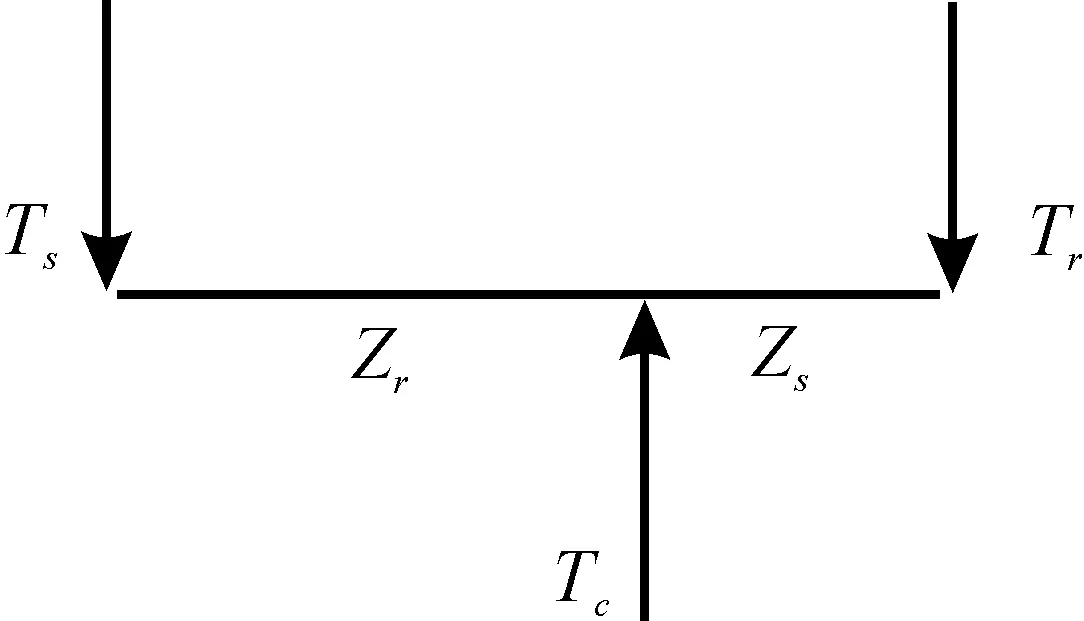
图2 行星齿轮机构系统杠杆原理
根据式(1)(2)可得出

(3)
(4)
1.1 并联驱动
并联驱动有2种工作模式,分别为闭锁离合器接合与分离情况下耦合装置的工作状态。当离合器接合时,行星齿轮机构处于锁死状态,电机的驱动力和发动机的驱动力直接叠加后,输出给变速器,用于驱动整车,图3为并联驱动模式下的能量流。
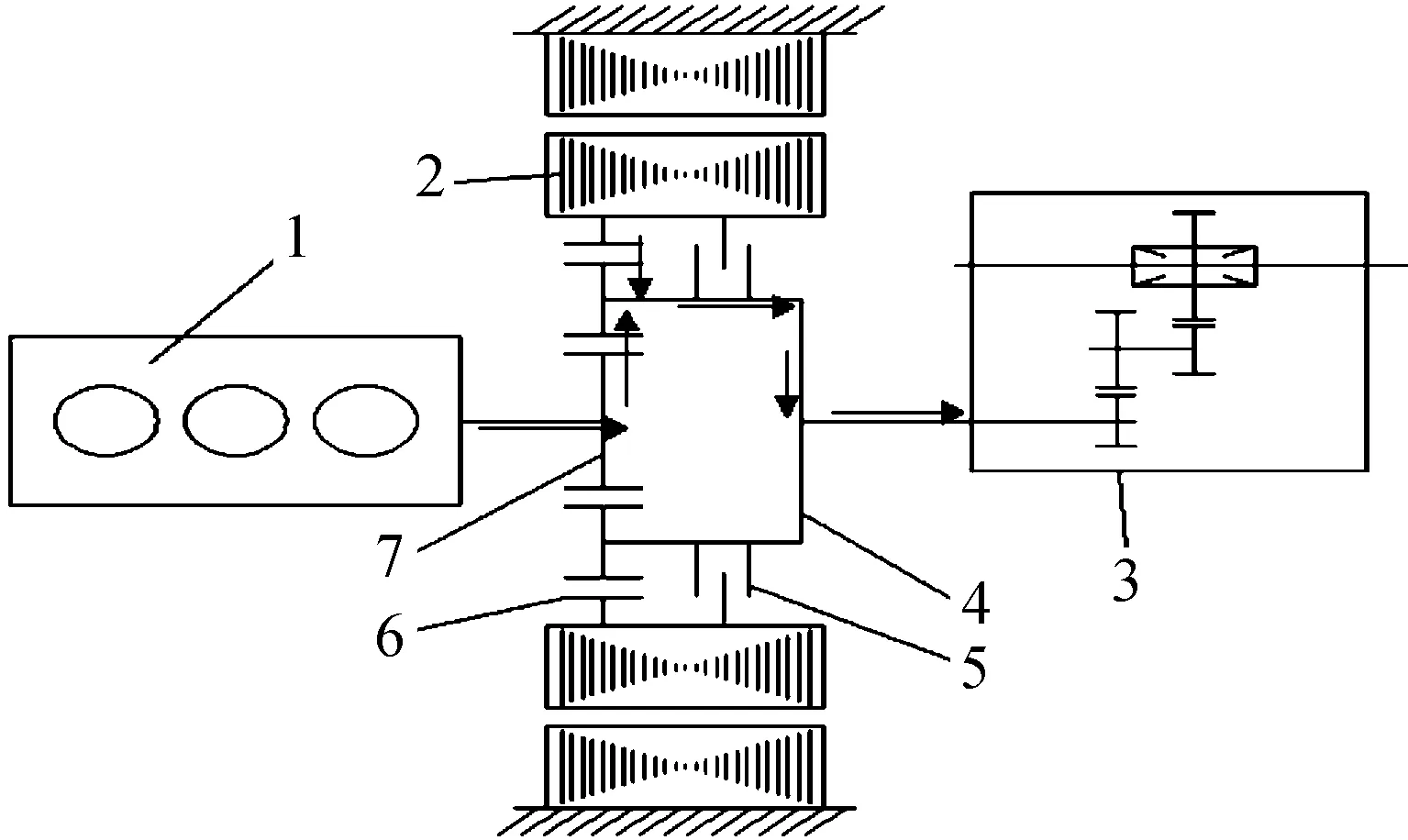
1.发动机;2.电机;3.变速器;4.行星架;5.闭锁离合器;6.齿圈;7.太阳轮
根据行星齿轮机构工作原理,当整车在并联驱动工作模式下,电机与发动机同时对行星机构输出驱动扭矩,即电机与发动机扭矩方向相同,设定为正方向,建立如图4、图5的行星轮杠杆受力分析图,可知齿圈受到的力矩Tr由电机力矩Tem和闭锁离合器力矩Tcl组成,太阳轮受到的力扭矩等于发动机力矩Tice。根据式(3)可得
(5)
式中:Tem表示电机的力矩;Tice表示发动机的力矩;Tcl表示闭锁离合器的力矩,整理后可得
(6)
图4假设了闭锁离合器的力矩Tcl与电机力矩Tem方向相反。如图5所示,当闭锁离合器的力矩Tcl与电机力矩Tem方向相同时可得
( 7)
整理后可得
(8)
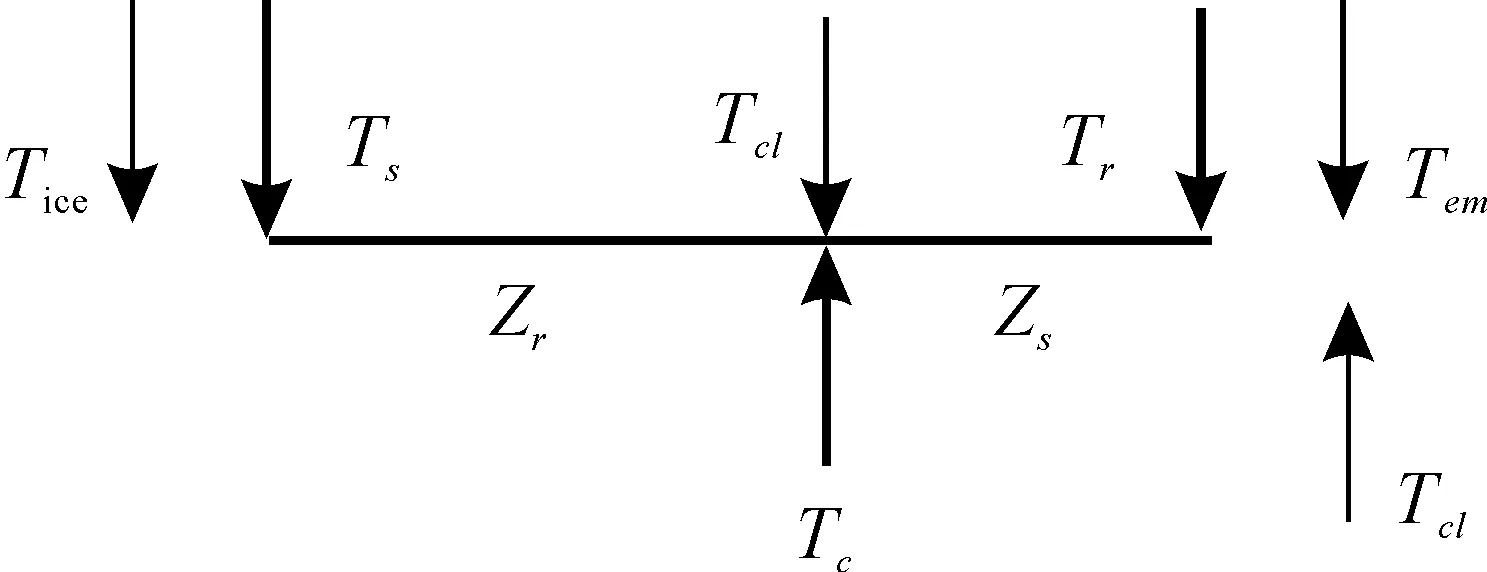
图4 并联驱动模式行星机构受力分析图1
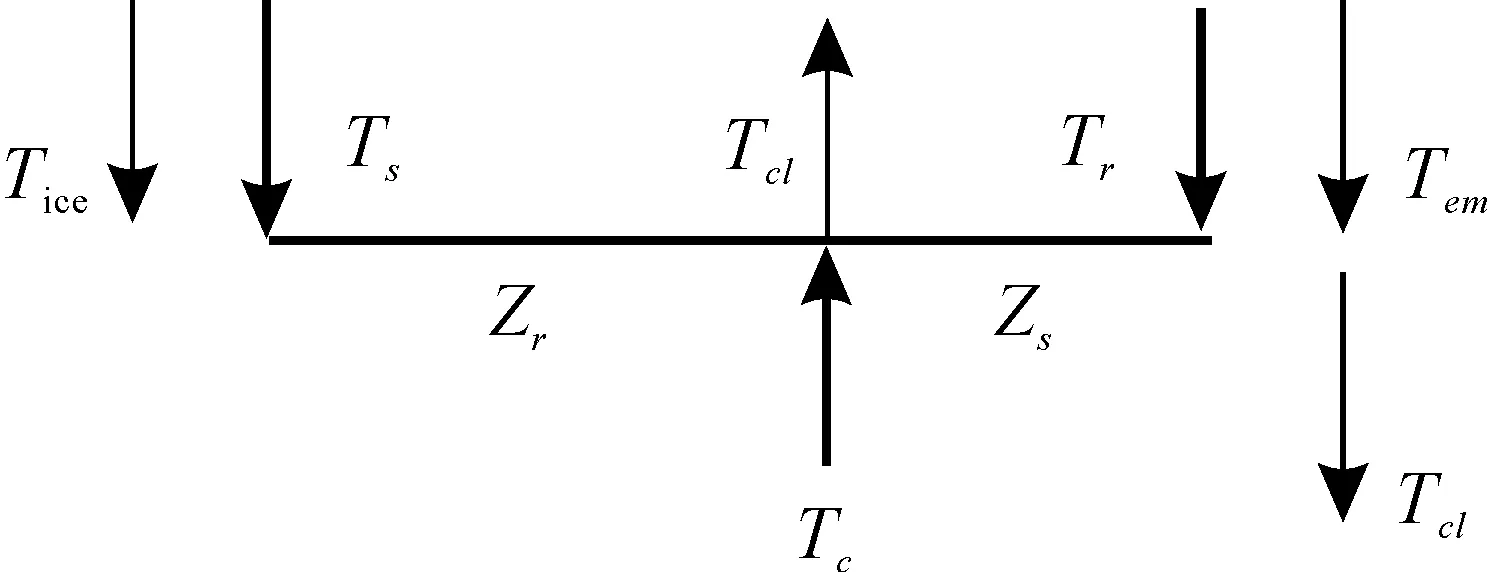
图5 并联驱动模式行星机构受力分析图2
在做闭锁离合器力矩容量计算时,只需要得出离合器力矩Tcl的数值大小即可,不需要做方向判断,因此综合式(6)和(8)可得
(9)
由式(5)可知

(10)
此时闭锁离合器力矩Tcl与电机力矩Tem反向。
由式(7)可知

(11)
此时闭锁离合器力矩Tcl与电机力矩Tem同向。
闭锁离合器力矩Tcl方向及计算如表2所示。

表2 并联驱动闭锁离合器力矩Tcl方向及计算表
1.2 行车充电
根据行星齿轮机构工作原理,当混合动力车工作在行车充电模式下,发动机动力输入到太阳轮,一部分动力分配至齿圈用于发电,一部分动力分配至行星架用于驱动车辆行驶,能量流如图6所示。建立如图7的行星轮杠杆受力分析图,发动机力矩设定为正方向,可知齿圈受到的力矩Tr由电机力矩Tem和闭锁离合器力矩Tcl组成,太阳轮受到的力扭矩等于发动机力矩Tice,并且根据电机的特性可知电机力矩Tem为负方向,则离合器力矩Tcl必为正方向。根据式(3)可得

(12)
整理后可得
(13)

1.发动机;2.电机;3.变速器;4.行星架;5.闭锁离合器;6.齿圈;7.太阳轮

图7 行车充电模式行星机构受力分析
闭锁离合器力矩Tcl方向及计算如表3所示。
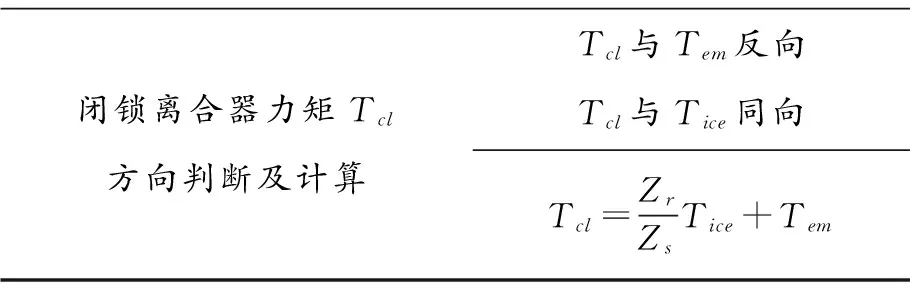
表3 行车充电闭锁离合器力矩Tcl方向及计算表
1.3 闭锁离合器最大力矩容量
通过本文闭锁离合器的动力学分析,可得出闭锁离合器最大力矩容量需求计算公式:

( 14)
由于闭锁离合器最大力矩容量需求在闭锁离合器设计时,仅仅考虑其力矩值的大小,而不考虑其方向,同时,为了便于比较,因此式(14)中二者计算结果均为绝对值。
1.4 仿真及结果分析
为了验证本文所推导的闭锁离合器的力矩计算公式,应用Matlab/Simulink软件建立了混合动力耦合系统动态仿真模型,对并联驱动模式和行车充电模式下的闭锁离合器力矩进行分析,仿真结果如图8所示。
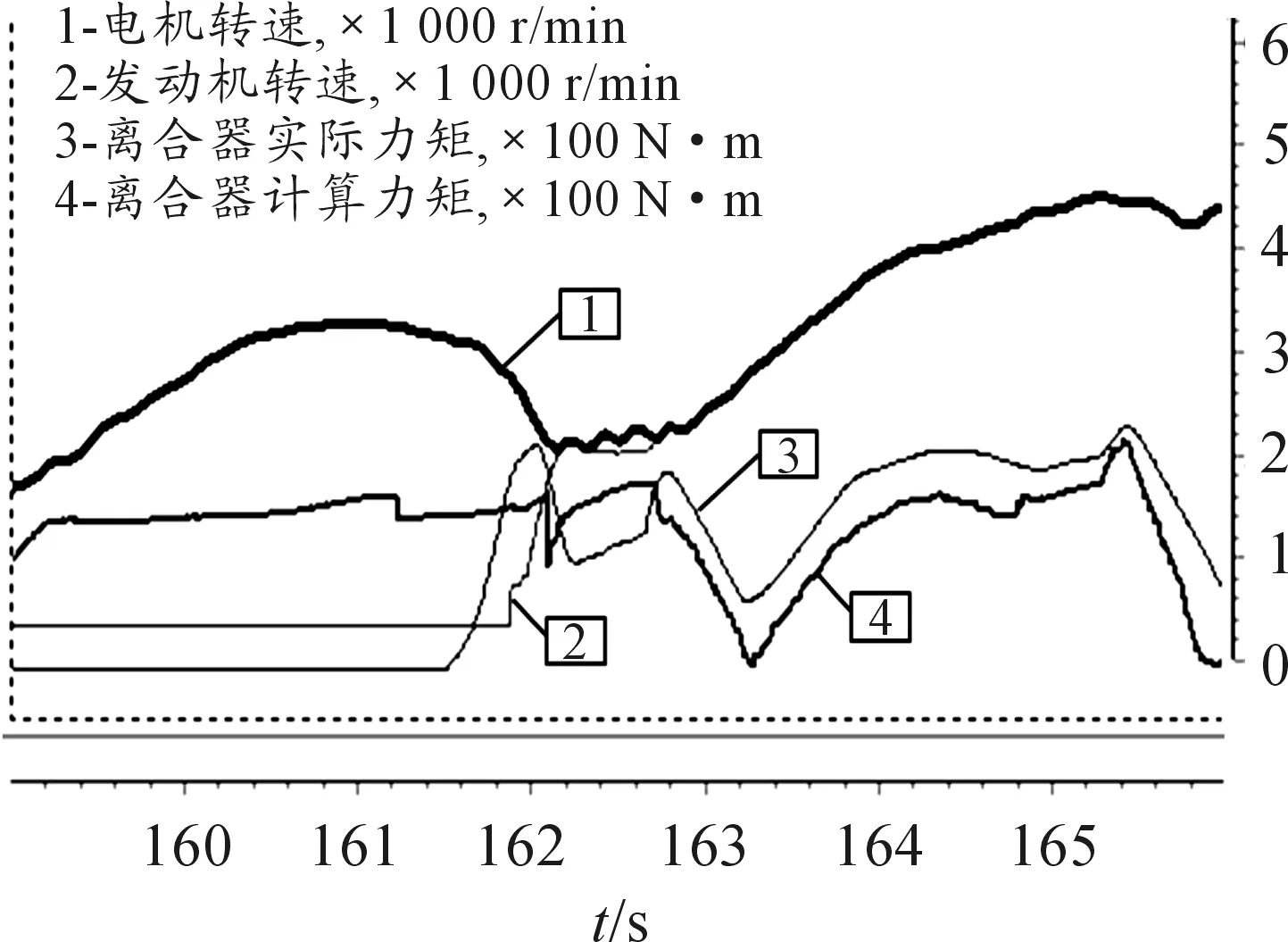
图8 耦合装置仿真结果
由图8可以看出:发动机在启动过程中,转速由0逐渐增大至与电机转速同步,该过程属于发动机启动的动态过程,不适用本文推导的闭锁离合器力矩计算公式;在发动机转速与电机转速同步后,进入稳态控制阶段,应用本文推导的闭锁离合器力矩计算公式经过仿真得到图8中的曲线4,策略控制的闭锁离合器力矩为曲线3。当闭锁离合器的实际力矩大于等于计算力矩时,发动机转速和电机转速同步,与本文的闭锁离合器动力学分析结论吻合。
2 闭锁离合器设计准则
本文所述混合动力耦合装置,发动机连接太阳轮、电机连接齿圈、行星架连接变速器输入轴,闭锁离合器设置与齿圈和行星架之间,根据行星轮的动力学特性推导得到闭锁离合器力矩计算式(9)、(13),闭锁离合器设计准则如下:
① 根据混合动力系统构型方案,制定不同工作模式下的各部件工作状态表;
② 根据各部件工作状态表筛选出闭锁离合器工作状态为接合的工作模式;
③ 根据行星轮杠杆分析方法建立各个工作模式下的行星轮受力分析杠杆图;
④ 根据行星轮动力学理论,推导各个工作模式下的闭锁离合器力矩计算公式,并按式(14)选取最大计算值作为闭锁离合器的最大力矩容量值。
⑤ 发动机力矩在参与计算时需要放大,放大系数为齿圈齿数与太阳轮齿数之比Zr/Zs;电机力矩在参与计算时系数为1。
⑥ 一般来说,并联驱动模式的闭锁离合器力矩需求小于行车充电模式。
⑦ 为更好地保护闭锁离合器,计算时应采用安全系数,一般取1.2~1.3。
⑧ 试验研究表明:摩擦因数随着温度变化会有一定的差异,闭锁离合器应采用最小的摩擦系数进行设计计算。
3 结论
本文通过对混合动力汽车工作模式进行分析,并结合行星轮的动力学特性、行星轮杠杆受力分析法,推导出行星轮闭锁离合器的力矩计算公式。本文所推导的动力学公式可有效指导混合动力汽车行星轮耦合装置的闭锁离合器的动力学设计和计算,实际验证结果与理论推导相符合。
[1] 杜波,秦大同,段志辉,等.新型并联式混合动力汽车模式切换协调控[J].中国机械工程,2012,23(6):739-744.
[2] 肖敏.行星齿轮变速箱闭锁离合器摩擦力矩的计算[J].机械,2007,34(1):19-20,40.
[3] 伊海霞,杨正林,蒋元广,等.混合动力用行星轮耦合机构的特性分析与试验[C]//2009中国汽车工程学会年会论文集.北京:机械工业出版社,2009.
[4] 刘钊,赵世琴.用杠杆模拟法建立行星变速器动力学模型[J].汽车工程,2000,22(4):274-277.
[5] 饶振纲.行星传动机构设计[M].北京:化学工业出版社,2003.
[6] 杨建明,张策,林忠钦,等.行星齿轮传动动力学特性研究进展[J].航空动力学报,2003,18(2):299-304.
[7] 步曦,杜爱民,薛锋.混合动力汽车用行星齿轮机构的理论研究与仿真分析[J].汽车工程,2006,28(9):834-838.
[8] 朱元,吴志红,陆科.行星齿轮混合动力汽车驱动模式的切换规则[J].同济大学学报(自然科学版),2009,37(7):948-954.
[9] 朱福堂,陈俐,殷承良,等.混合动力汽车行星齿轮机构的方案设计与优选[J].中国机械工程,2010(1):104-109.
(责任编辑 刘 舸)
收稿日期:2016-12-25 基金项目:重庆市社会民生科技创新专项(cstc2016shmszx80019)
Dynamic Analysis of the Locking Clutch in a Hybrid Coupling Mechanism
HUANG Dong1, ZHOU Zhiguang1, LIU Yonggang2, JING Feng1, ZHAO Jun3
(1.Chery Automobile Co., Ltd.,Wuhu 241006, China; 2.School of Automotive Engineering, Chongqing University, Chongqing 400044, China; 3.Chongqing University of Technology, Chongqing 400054, China)
Parallel hybrid vehicle coupling device is a key component of the hybrid electric vehicle, and its performance determines the smoothness and fast of mode switching processes. The design and development of the lockup clutch is one of the difficulties in the hybrid coupling device. According to the dynamics analysis of the locking clutch in a hybrid coupling mechanism, based on the research of the mode of hybrid vehicles and combined with the dynamic characteristics of planetary gear, and through the planetary gear lever force analysis, it derives the torque calculation formula for the locking clutch in the planetary gear set, and provides the necessary basis for the design of locking clutch.
hybrid vehicle;coupling mechanism;locking clutch
2017-04-19 基金项目:国家863计划资助项目(2011AA11A226);重庆市重点产业共性关键技术创新专项 (cstc2015zdcy-ztzx60013)
黄东(1978—),男,主要从事新能源汽车混合动力系统研究和开发,E-mail:huangdong1@mychery.com。
黄东,周之光,刘永刚,等.混合动力汽车耦合装置闭锁离合器动力学分析[J].重庆理工大学学报(自然科学),2017(8):81-85.
format:HUANG Dong, ZHOU Zhiguang, LIU Yonggang,et al.Dynamic Analysis of the Locking Clutch in a Hybrid Coupling Mechanism[J].Journal of Chongqing University of Technology(Natural Science),2017(8):81-85.
10.3969/j.issn.1674-8425(z).2017.08.013
U469.72
A
1674-8425(2017)08-0081-05
