一种用于抑制混合动力电驱系统母线电压泵升
2017-09-12刘建林施大发王辉罗德荣
刘建林,施大发,王辉,罗德荣
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南机电职业技术学院,湖南 长沙 410151)
一种用于抑制混合动力电驱系统母线电压泵升
刘建林1,2†,施大发2,王辉1,罗德荣1
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南机电职业技术学院,湖南 长沙 410151)
在应用于工程装备的混合动力交直交电驱系统中,永磁同步电机在进行再生制动时往往回馈过量的电功率至直流母线上,容易引起直流母线电压泵升,影响发动/发电机组的运行性能.为解决该问题,从电机制动时逆变器和储能系统双向DC/DC占空比匹配不一致的角度分析母线电压泵升的原因,在此基础上提出了一种在传统逆变器双闭环矢量控制的转速外环上添加前馈补偿的控制策略,通过将直流母线电压与其参考值的误差进行比例-微分调节,并利用其输出的补偿量作为下垂因子作用于q轴电流给定值上,减小电机制动阶段的转矩电流和逆变器的占空比,限制电机回馈的电功率.仿真结果表明,该控制策略能有效改善混合动力电驱系统电机制动阶段母线电压泵升的问题,能较好地保护母线电气安全.
混合动力;交直交驱动系统;母线电压泵升;前馈控制;再生制动
在工程机械装备中,基于混合动力交直交功率变换的永磁同步电机驱动系统因其负载特性好、功率密度高、可实现瞬时峰值功率的快速补偿等优点,正受到越来越多的应用[1].然而,永磁同步电机在进行矢量控制时,具备四象限运行能力,在进行再生回馈制动时,往往采用较大的电磁转矩进行快速制动,造成电机回馈输出的电功率过高,超级电容无法及时吸纳,易引起母线电压泵升[2-3].如何改善电机制动过程中母线电压泵升的状况成为当前混合动力电驱系统研究的一大难题.目前,针对此问题的研究主要集中在双向DC/DC拓扑结构和控制[4-7]、超级电容建模和配置[8-9]以及电压均衡[10-11]等方面,相应的控制策略也多集中在混合动力储能系统这边.文献[12]不同程度地利用双向DC/DC控制超级电容的充电电流,使其匹配电机的回馈电能.然而,该类策略只能实现超级电容匹配电机回馈功率的粗调,并未从功率变换器占空比的角度对母线电压泵升原理进行分析,依旧未能从实质上解决电机回馈功率过量而引起母线电压泵升的问题.虽然可采用制动电阻消纳电机回馈的瞬时峰值功率,但制动电阻的使用和配置多基于经验和规则,且强制使用制动电阻也将增加不必要的能耗,无法体现混合动力系统和技术的节能优势.
为解决以上问题,本文提出了一种基于前馈补偿的控制策略.从电机再生制动过程中,逆变器和双向DC/DC占空比不匹配的角度分析了母线电压泵升的原理,在此基础上通过引入直流母线电压的扰动前馈,得到电机双闭环矢量控制中q轴电流给定值的下垂调控因子,减小q轴电流,以此限制逆变器相对于DC/DC而言过大的占空比,从而约束了电机回馈的电功率,使其便于超级电容储能系统的吸收.仿真结果表明,该策略能有效改善电机制动阶段母线电压泵升问题.
1 制动过程母线电压泵升原理
1.1 混合动力电驱系统结构
包含超级电容储能系统在内的混合动力电驱系统结构如图1所示.发动机与发电机刚性耦合组成发动/发电机组,发动机旋转拖动发电机发电,经双PWM功率变换电路驱动负载电机.由超级电容和双向DC/DC组成的混合动力储能系统与制动电阻、母线电容一同并联在直流母线上,储能系统用于瞬时的功率补偿:当控制双向DC/DC运行于boost模式,超级电容释能;双向DC/DC运行于buck模式,超级电容储能.
在该结构中,负载电机为表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM),发电机为表贴式永磁同步发电机.PWM整流采用双闭环矢量控制策略控制直流母线电压稳定在给定值udc*;PWM逆变采用双闭环矢量控制策略控制负载电机转速运行于给定值n*,其控制结构如图2所示;双向DC/DC采用PWM脉宽调制控制超级电容的充放电电流iL.图1中,Cdc为直流母线电容,Csc为超级电容,R为制动电阻.

图1 混合动力电驱动系统电路拓扑结构Fig.1 Circuit topology of hybrid electric drive system
以负载电机一个典型工作周期为例说明系统运行策略:电机启动过程,超级电容配合发动/发电机组输出峰值补偿功率,共同驱动负载电机运行;电机转速达到给定值,发动/发电机组单独对负载电机供能;电机制动,发动/发电机组正常功率输出以避免频繁起停机而损伤机械寿命,超级电容进行储能以吸收电机回馈电能,制动电阻视母线电压情况而决定是否开启,用以消耗超级电容无法吸纳的过剩电功率.在一个工作周期内,超级电容端电压在电机启动阶段由最高放电至最低,在制动阶段由最低进行充电.

图2 永磁同步电机双闭环矢量控制结构Fig.2 Control structure of permanent magnet synchronous motor
1.2 电机制动过程直流母线电压泵升原理
结合典型工况,假设:1)发动/发电机组在电机制动过程也保持稳定的功率输出,整流控制器依旧按控制母线电压udc在给定值的要求运行;2)双向DC/DC在制动阶段实时控制超级电容的充电电流大小,使其能匹配电机的制动回馈功率;储能系统各元器件已按照此规则完成电气指标选型;3)双向DC/DC的低压侧电感电流iL能受控迅速跟随其给定值iL*的变化.
根据以上假设,当电机侧回馈电功率恰能被超级电容器组吸收,PWM整流侧的电功率将用于维持母线电压稳定,不会产生多余的无功功率引起母线电压泵升[13].因此,电机再生制动时DC/DC应控制充电电流与电机回馈的电功率相匹配,即:
(1)
式中:iL*为双向DC/DC电流给定值;usc为超级电容端电压;Pload为负载电机输出电功率,其大小由PMSM转速和电磁转矩决定:
(2)
式中:n为电机转速;Te为电机电磁转矩.在图2所示的双闭环磁场定向矢量控制(field oriented control,FOC)方案中[14],电机直轴电流id为0;又由于SPMSM无凸极效应,则电磁转矩表达式为:
(3)
式中:np为电机极对数;Ψf为定子磁链;iq为交轴电流,也叫做转矩电流.iq为正时,电机电动消耗电能;iq为负时,电机再生制动回馈电能.结合式(2)~(3),电机回馈的电功率与转速n和转矩电流iq有关.在FOC中,电机回馈制动瞬间,转速给定值n*阶跃变为0,与实际转速n做差后输入转速外环控制器,由于转速误差较大,外环负饱和而输出限幅值,iq在电流内环的跟随作用下,保持在最大负值.此时Pload与n成线性关系,因此iL*也将随n的下降而减小,以此匹配Pload的线性变化.
然而,式(1)中DC/DC电感电流给定值的粗略匹配并不能完全保证超级电容恰好能吸纳PMSM的回馈功率.在buck模式下,双向DC/DC高压侧(直流母线侧)电流iLdc和其低压侧(超级电容侧)电流iL以及功率管占空比D有关:
iLdc=iL·D
(4)
根据buck模式下双向DC/DC脉宽调制原理[15],其占空比由电路两侧电压所定义:
(5)
在整个PMSM制动阶段,超级电容端电压是从最低值开始充电上升,因此在制动阶段初期,占空比较小,导致DC/DC高压侧电流在一个开关周期Ts内的均值也较小,如图3所示.

图3 理想调制下母线侧双向DC/DC和逆变器电流波形Fig.3 Current waveform of Bi-DC/DC dc-bus side and inverter side in ideal modulation
与之同理,逆变器的占空比M(调制比)也可定义为逆变器交流侧电压矢量幅值|us|与直流母线电压的比值:
(6)
在FOC控制下,忽略电枢电阻,PMSM电压矢量us满足:
(7)
假设id=0恒成立且id无波动,计算式(7),可得:
(8)
式中:Ld,Lq分别为dq轴同步电感;ud,uq为dq轴定子电压;ω为电角速度.根据前文分析,iq在PMSM制动阶段保持负最大,故|us|可看作只与ω有关.由于ω与转速n成正相关,联立式(6)和式(8),可知M在制动初期较大.
为便于分析,假设图3中逆变器上桥臂功率管在SVPWM调制下处于(1,0,0)状态,并且逆变器与DC/DC为电流匹配效果最理想的同步调制,则此时逆变器直流侧电流iinv为:
iinv-iasa+ibsb+icsc=ia
(9)
由于制动初期,a相占空比偏高,逆变器功率管开管时间相较于buck模式下的双向DC/DC要长,此时即便iLdc与iinv在数值和调制时间上一致,却依然会因为占空比大小不同而失匹配,如图3中iinv比iLdc多出ΔT的续流时间.在发动/发电机组持续输出电能的情况下,若不开启制动电阻,ΔT这段时间内失配的电流只能由母线电容进行补偿.usc越低,DC/DC的占空比相对于逆变器就差得越多,母线电容的瞬时功率补偿就越大,根据电容充放电公式:i=C·du/dt,母线电压波动幅度越大,泵升情况越严重.此时,udc不再受整流器控制,泵升的udc最终将使发电机在PWM整流器四象限控制的作用下,由发电状态变为电动状态,影响原动机的做功特性.
2 基于前馈补偿的抑制母线电压泵升控制 策略
2.1 控制策略分析
根据前文分析,电机制动阶段母线电压泵升是由于制动初期逆变器和DC/DC占空比不一致而造成的,根据式(6)和式(8),逆变器的占空比不仅与其电角频率有关,也与制动阶段iq相关.在制动阶段适量减小图2中转速外环输出的q轴电流给定值,可使iq在内环的作用下随之降低,从而降低逆变器的占空比.从宏观上看,减少iq可以减小电机的电磁转矩,在降低转轴制动力矩的同时,降低了电机回馈输出的电功率.
受下垂控制启发,可以利用直流母线电压对制动阶段的q轴电流给定值做一前馈,通过直流母线电压的幅值情况来自动调控q轴电流给定值的大小.由此得到的q轴电流给定值调控算法如下:
(10)


图4 下垂调控因子前馈补偿控制结构Fig.4 Feed-forward compensation control structure of sagging regulation factor

为了提升前馈环节对直流母线电压变化的灵敏度,将图4结构中的补偿量微调环节设为PD控制器(比例-微分).采用PD控制器可以对母线电压泵升的干扰做出迅速响应,保证线性反馈控制律的渐进稳定.比例环节用以放大udc与udc*之间的动态误差,微分环节用以观测该误差的变化率.由此得到的下垂调控因子算法为:
(11)
式中:kp为比例系数;kd为微分系数.
在上述电驱系统中,将式(10)和式(11)作为电机iq电流的微调环节,将式(1)作为超级电容充电电流的粗调环节,由此可得混合动力电驱系统中电机制动阶段,抑制母线电压泵升策略的控制框图如图5所示.

图5 基于前馈补偿的抑制母线电压泵升策略控制框图Fig.5 Control strure of suppressing dc-bus voltgae pumping based on feed-forward compensation
需要说明的是,减小了电机制动过程的转矩电流iq,将会导致其电磁转矩变小.PMSM运动方程为:
(12)
式中J为转动惯量.由于电磁转矩在电机再生制动阶段为负,因此它与负载转矩Tf一起提供电机转轴制动的反作用力.当Te减小后,电机总制动力矩减小,对式(12)作变形,可知电机的制动时间会相应拉长:
(13)
2.2iq电流微调环节控制设计
补偿量微调环节作为前馈补偿量加入到转速-电流双闭环结构中,由于其作用对象是电流内环给定值,因此其参数整定与设计只与内环有关,且内环设计原则与传统双环设计方案一致.鉴于目前已有众多文献对电流内环的设计进行过研究,本文假设电流内环的参数已定,电流内环闭环传函已按典型Ⅱ型系统最优指标设计成一标准二阶环节:
(14)
因此,补偿量微调环节的闭环结构如图6所示.

图6 iq电流补偿量微调环节闭环结构图Fig.6 Closed-loop compensation control structure for iq current fine-tuning
图中,kv=M·R,定义为dq坐标下发电机电压、电流的比例关系,其中M为调制比,R为定子电阻;Cdc为母线电容;kvf为电压反馈放大倍数,数字采用下kvf=1;Tvf为采样时间常数.
由于该补偿闭环的作用对象是母线电压,其截止频率一般较低,故电流闭环C(s)可以去掉高频,降阶为一阶惯性环节:
(15)
式中Tc=2ξ/ω,为内环等效时间常数.采用工业上调节器的零点与被控对象的最大时间常数极点对消原则,则有:
(16)
将其进行配置,则该结构的开环传函可视为典型Ⅰ型系统:
(17)
至此,能得出闭环传函为一典型Ⅱ型系统:
(18)
按照典型Ⅱ型系统最优阻尼系数设计:
(19)
可有:
(20)
3 仿真分析与验证
为验证本文设计策略的有效性,在Matlab/ Simulink平台上搭建图1结构的仿真模型.针对电机制动过程进行仿真验证.主要仿真模型参数列于表1.

表1 工程机械装备混合动力电驱系统仿真参数Tab.1 Engineering machinery and equipment hybrid electric drive system simulation parameters
仿真中,发动/发电机额定转速设为2 000 r/min,超级电容最大充电电流限制在200 A,制动电阻开启阈值设为640 V;前馈补偿微调环节的控制参数经多次调试设为:kp=3,kd=12.2,正负限幅设为0.5;默认电机0 s已达到额定转速,0.1 s开始制动.
图7为逆变器控制PMSM的转速曲线,分别表示采用本文设计的前馈补偿环节后电机转速及未采用前馈补偿情况下电机正常再生制动时的转速.图8为2种方式下,逆变器控制电机的iq及其给定值iq*的波形对比.

图7 负载电机制动转速对比Fig.7 Comparison of braking speed

(a)正常制动

(b)前馈补偿制动图8 Q轴电流对比Fig.8 Comparison of iq
由图7和图8可以看到,在采用前馈补偿后,iq由于下垂调整因子的作用而减小为-60 A,根据前文分析,这直接减弱了电机的制动转矩.由牛顿运动定律,转轴减速阶段的“加速度”会随着作用力的减小而减小,电机减速变慢,制动时间拉长;相比于正常再生制动仅消耗0.005 4 s,前馈补偿下的再生制动耗时0.014 5 s.但同时也能发现,在采用前馈补偿后,iq的动态稳定性能变好,相较于正常制动阶段中iq的阶跃突变,前馈补偿下的q轴电流在制动后期的积分超调更小.这是因为前馈补偿后,电机的制动力矩变小,转速下降变慢,逆变器双环结构中的输入误差变化率变缓,内、外环的带宽更能适应这一缓慢变化的过程.
图9为2种方式下,混合动力电驱系统动力总成的功率对比.图10则为直流母线电压对比,分别表示采用前馈补偿后电机再生制动阶段的母线电压波形及正常再生制动下的母线电压波形.这里默认发电机发电状态下输出功率为负,电动状态下功率为正;超级电容充电功率为负,放电功率为正;负载电机电动状态消耗功率为正,再生制动状态回馈功率为负.

(a)未采用前馈补偿

(b)采用前馈补偿图9 功率对比Fig.9 Comparison of power

图10 直流母线电压对比Fig.10 Compaison of dc voltage
图9(b)制动阶段,超级电容根据式(1)的粗调环节实时调整充电电流以匹配PMSM的回馈功率.而在前馈补偿的调控下,电动机因iq变小而导致回馈的峰值功率受限.由于电机回馈的电能基本由超级电容吸纳,发电机在此过程无实际有功功率输出,其输出功率向0变化,工作状态由发电状态变为待机状态过程中,存在一定的积分超调(7 kW).这是因为发电机同样采用双闭环矢量控制结构,其电压外环在这一过程中因为母线电压超出其给定值而产生了动态误差,在调整这一误差的过程中,PI控制器因自身积分特性必然存在一超调过程,但由于图10中母线电压没有剧烈泵升,而只是小幅波动,因此对整流器的影响不大,发电机工作状态变换的幅度在可接受范围内.而与之相反,图9(a)中发电机的输出功率波动剧烈,对应在图10中的母线电压,其泵升程度较为严重且存在频繁振荡现象,这一过程与整流器对发电机的控制产生正反馈,导致发动/发电机组的运行性能变差.
图10中母线电压的波动情况更能体现前馈补偿的调控作用:在未采用前馈补偿而选择正常制动时,母线电压泵升频繁振荡,最高幅值达到633 V,距额定值的波动幅度达到10.1%;采用前馈补偿进行制动,母线电压变化平缓,最高幅值为594 V,波动幅度降为3.3%.
根据前文母线电压泵升原理分析,图11给出了2种方式下DC/DC和逆变器的占空比数值对比.

(a)正常制动
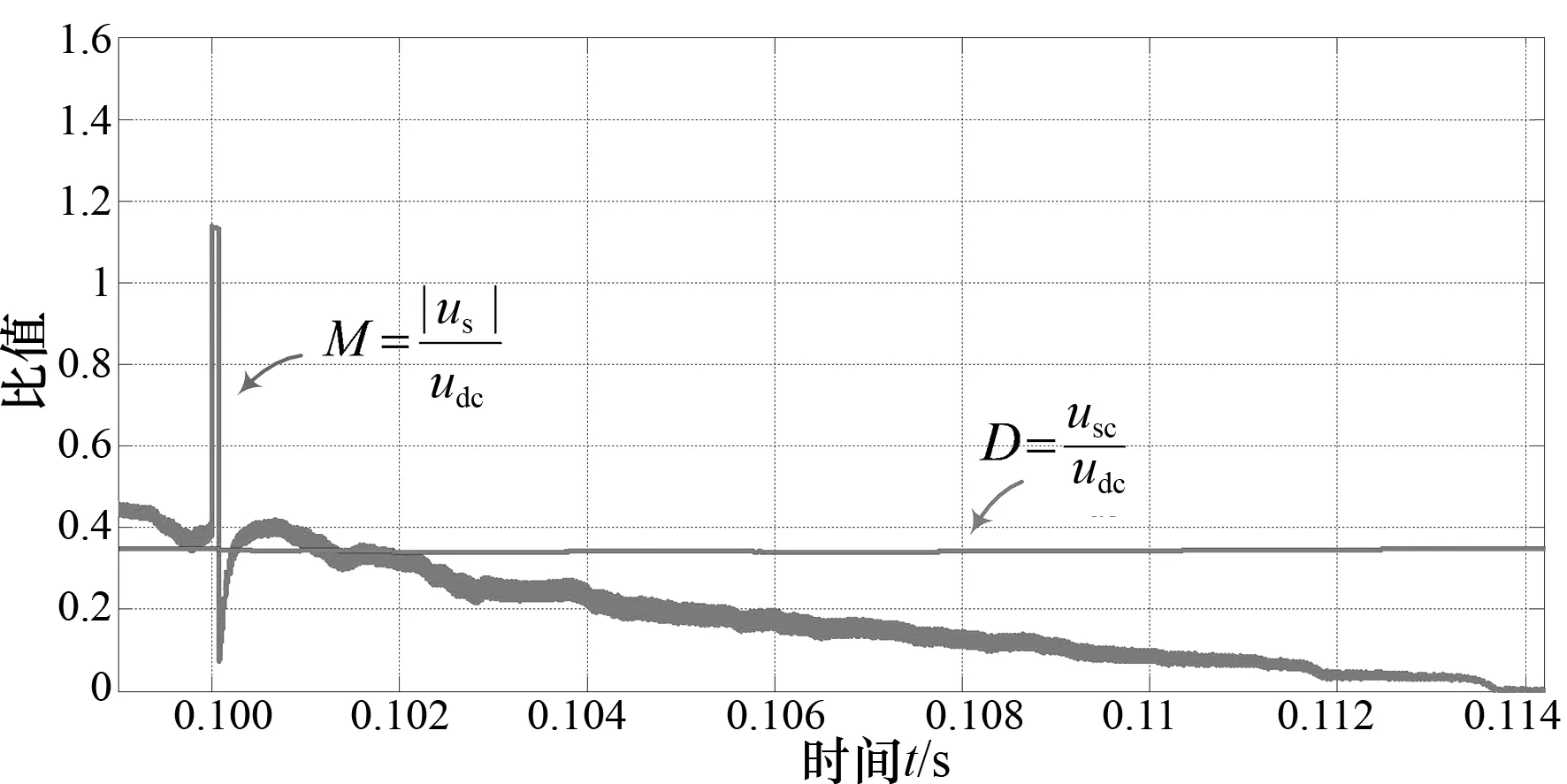
(b) 前馈补偿图11 功率变换器占空比对比Fig.11 Comparison of converter duty cycle
可以看到,电机同样在0.1 s进行再生制动,正常制动下逆变器的占空比在制动器前期几乎是双向DC/DC的3倍;且从数值上看,|us|的瞬时值超过了udc,SVPWM中电压矢量幅值超过内接六边形而进入过调制区域,这对buck模式下的双向DC/DC而言很难进行匹配.而在前馈补偿的调控下,电机回馈电流幅值因iq减小而变小,相比于双向DC/DC的占空比匹配也更为友好.
4 结 论
混合动力电驱系统在电机再生制动过程中会因逆变器占空比过大而导致回馈电能过剩,在储能系统吸纳能力不足的情况下易引起母线电压泵升.本文从占空比角度分析了电机再生制动时母线电压泵升原理,在此基础提出了一种对q轴电流给定值前馈补偿的控制策略,通过将直流母线电压的波动作为前馈扰动进行调理,并将输出的补偿量作为下垂因子作用于q轴电流给定值,减小电机制动阶段iq,降低了逆变器的占空比,限制电机回馈的电功率.仿真表明该策略能有效改善母线电压泵升问题,虽然会拉长电机制动时间,但在对电机运动控制精度要求不高的工程机械装备中具有一定的应用价值.
[1] TAE-SUK Kwon,SEON-WOO Lee.Power control algorithm for hybrid excavator with supercapacitor[J].IEEE Transactions on Industry Applications,2010,46(4):1447-1455.
[2] 卢东斌,欧阳明高,谷靖,等.电动汽车永磁同步电机最优制动能量回馈控制[J].中国电机工程学报,2013,33(3):83-91.
LU Dongbing,OUYANG Minggao,GU Jing,etal.Optimal regenerative braking control for permanent magnet synchronous motors in electric vehicles[J].Proceedings of the CESS,2013,33(3):83-91.(In Chinese)
[3] 卢智锋,李军,周世琼.永磁同步电机制动能量回收系统的控制方法[J].电力自动化设备,2013,33(2):131-135.
LU Zhifeng,LI Jun,ZHOU Shiqiong.Control of PMSM braking energy regeneration system[J].Electric Power Automation Equipment,2013,33(2):131-135.(In Chinese)
[4] KILLER A,ARMSTORFER A,DIEZ A E.Ultracapacitor assisted regenerative braking in metropolitan railway systems[C]//IEEE Colombian Intelligent Transportation Systems Symposium.Bogota,Colombia:IEEE,2012:1-6.
[5] GRBOVIC P J,DELARUE P.The ultracapacitor-based regenerative controlled electric drives with power-smoothing capability[J].IEEE Trans on Industrial Electronics,2012,59(12):4511-4522.
[6] GRBOVIC P J,DELARUE P,MOIGNE P L.A three-terminal ultracapacitor-based energy storage and PFC device for regenerative controlled electric drives[J].IEEE Trans on Industrial Electronics,2012,59(1):301-316.
[7] DING Shichuan,CHENG Ming,HU Chao.An energy recovery system of regenerative braking based permanent magnet synchronous motor for electric vehicles[C]//International Conference on Electrical Machines and Systems.Busan,Korea,2013:280-284.(In Chinese)
[8] 赵洋,韦莉,张逸成.基于粒子群优化的超级电容器模型结构与参数辨识[J].中国电机工程学报,2012,15(5):155-161.
ZHAO Yang,WEI Li,ZHANG Yicheng.Structure and parameter identification of supercapacitors based on particle swarm optimization[J].Proceedings of the CSEE,2012,15(5):155-161.(In Chinese)
[9] KRECZANIK P,VENET P.Study of supercapacitor aging and lifetime estimation according to voltage,temperature,and RMS current[J].IEEE Trans on Industrial Electronics,2014,61(9):4895-4902.
[10]QU Yanqing,ZHU Jiangu,HU Jiefeng.Overview of supercapacitor cell voltage balancing methods for an electric vehicle[C]//IEEE ECCE Asia Downunder.Melbourne,Australia:IEEE,2013:810-814.
[11]张晓立,张辉,苏冰.基于Zetas的串联超级电容器电压均衡技术[J].电力电子技术,2013,47(5):79-80.
ZHANG Xiaoli,ZHANG Hui,SU Bing.Voltage equalization technique using multistacked-zetas converter for series connected super-capacitor[J].Power Electronics,2013,47(5):79-80.(In Chinese)
[12]韦统振,吴理心,韩立博.基于超级电容器储能的交直交变频驱动系统制动能量综合回收利用方法研究[J].中国电机工程学报,2014,34(24):4076-4083.
WEI Tongzhen,WU Lixin,HAN Libo.Reasearch on the integrated braking energy recovery strategy based on supercapacitor energy storage for AC-DC-AC variable-frequency drive[J].Proceedings of the CSEE,2014,34(24):4076-4083.(In Chinese)
[13]GROUZ F,SBITA L,BOUSSAK M.Modelling for non-salient PMSM with multi-phase inter-turn short circuit[C]//IEEE International Multi-Conference on Systems,Signals & Devices.Hammamet,Tumissia,2013:1-6.
[14]LAKSHMI G S,KAMAKSHAIAH S.Closed loop PI control of PMSM for hybrid electric vehicle using three level diode clamped inverter for optimal efficiency[C]//International Conference on Energy Efficient Technologies for Sustainability.Nagercoil,India,2013:754-759.
[15]徐德鸿,马皓,汪槱生.电力电子技术[M].北京:科学出版社,2006:65-67.
XU Dehong,MA Hao,WANG Yousheng.Power eletronics technology[M].Beijing:Science Press,2006:65-67.(In Chinese)
A Feed-forward Compensation Control Strategy for DC-bus Voltage Pumping Suppressing in Hybrid Electric Driving System
LIU Jianlin1,2†,SHI Dafa2,WANG Hui1,LUO Derong1
(1.College of Electrical and Information Engineering,Hunan University,Changsha 410082,China;2.Hunan Mechanical & Electrical Polytechnic,Changsha 410151,China)
In the hybrid AC-DC-AC electric drive system of engineering equipment,the PMSM usually regenerates excessive braking energy to the D.C bus during the regenerated braking process.The excessive energy is likely to cause the D.C bus voltage pumping and reduces the operating performance of engine.To solve this problem,this paper analyzes the reason of D.C bus voltage pumping in the braking process from the view of the non-coincidence of the DC/DC and the inverter.On this basis,a control strategy of a feed-forward compensation added to the FOC outer loop is proposed.This strategy uses the PD controller to deal with the error between the D.C bus voltage and its reference value,and then adds the outputs of PD controller to the reference ofiq,so that theiqand the duty cycle of inverter can be both reduced.The regenerated power of PMSM is also limited.The simulation results show that the proposed control strategy can effectively improve the problem of D.C bus voltage pumping during the PMSM regenerated braking process,which is good for the electrical safety protecting in the D.C bus.
hybrid power;AC-DC-AC driving system;DC-bus voltage pumping;feed-forward control;regenerative braking
1674-2474(2017)08-0077-07
10.16339/j.cnki.hdxbzkb.2017.08.012
2016-11-02
国家自然科学基金资助项目(51577052),National Natural Science Foundation of China(51577052);湖南省教育厅科技项目(16C0571),Education Deportment of Science and technology of Hunan Province(16C0571)
刘建林(1978-),男,湖南湘乡人,湖南机电职业技术学院副教授
†通讯联系人:E-mail:tikolin@126.com
TM351
A
的前馈补偿控制策略*
