高精度单晶硅挠性摆式加速度计组件的工程化实现
2017-09-12王淞立刘海斌张尧舜李鹏飞
赵 虎,王淞立,刘海斌,张尧舜,李鹏飞
(中航工业西安飞行自动控制研究所,西安 710065)
高精度单晶硅挠性摆式加速度计组件的工程化实现
赵 虎,王淞立,刘海斌,张尧舜,李鹏飞
(中航工业西安飞行自动控制研究所,西安 710065)
针对单晶硅挠性摆式加速度计的高精度工程化应用需求,设计了加速度计组件及温控系统。针对大多数温控系统工作时的瞬时电流较大问题,设计了一种带抽头的加热片,将温控分为粗温控和精温控两个阶段,不同阶段采用不同的加热电阻。测试结果表明,设定目标温度为60℃,当外界环境温度从5℃到55℃变化时,温控系统到温时间小于15 min,控温精度小于±0.1℃,精温控时的最大电流为粗温控时的33.4%。连续15天通电实验表明,该组件的加速度计刻度系数K1稳定性小于10×10-6,偏值K0稳定性小于10 μg,满足各类高精度、工程化的应用需求。
挠性摆式加速度计组件;带抽头加热片;高精度温控系统;工程化
加速度计是惯性导航系统最为常见的一类惯性器件。工作环境温度变化对加速度计输出的影响是惯性导航系统的一个主要误差来源[1],采用各类模型的温度补偿[2-5]以及温度控制[6-9]一直是国内外惯性行业关注的一个重要方向。温度补偿方案需要根据不同的环境,建立复杂的模型,很难有一种补偿方法适应任何复杂的环境变化,而采用温度控制方案可以避免建立复杂的温度补偿模型,为惯性元件提供良好的工作环境,是提升挠性摆式加速度计精度的有效方式,但采用温度控制方案也存在一些问题。
首先,惯导系统供电电压一般为28 V,常用的温控方案通过控制PWM波占空比调节加热功率,该方案在工程化应用中存在瞬时电流大的缺点,即当组件到温后,仅需要较小的占空比就能够满足控温要求,但此时惯导系统的电源电流变化与PWM波一致,这一方面会向惯导系统的其它器件和电路引入噪声,另一方面也会增加系统电源的瞬时功率。其次,挠性摆式加速度计组件体积较大,仅进行单点的温度测量和控制不足以反映整体组件的温度变化,在上电过程中,即便监测点的温度已经非常稳定,其他部位的温度还在缓慢上升,这也会影响惯性元件的输出精度。再者,在工程化应用中,采用温控方案,预热时间通常较长,一般在15 min以上[10-11],缩短预热时间可减小导航系统的准备时间。
本文针对特殊应用背景下,弹类产品5℃~35℃的使用环境温度需求,设计并实现了一种面向高精度、小体积、低价格应用的单晶硅挠性摆式加速度计工程化组件。针对传统温控系统存在的问题,该方案提出了一种带抽头的加热片结构,在粗温控和精温控阶段分别采用不同的加热电阻,从而克服了采用PWM波控制的瞬时电流过大问题。将三个热敏电阻布置在加速度计组件的不同位置,温控系统采集三个点的平均温度进行温度测量和反馈控制。加计组件的测试结果表明,设定目标温度为60℃,室温环境下启动,该组件可在10 min内到温,其温控精度为±0.05℃,精温控时的电流峰值降为粗温控时的33.4%。系统环境温升8℃/h模拟实验结果显示,当外界环境温度从5℃变化到55℃时,加速度计温度变化0.15℃,由温度波动带来的加速度计误差小于1.2μg。连续15 d通电实验表明,该组件的加速度计刻度系数小于10×10-6,输出精度小于10μg,该设计可在惯性导航系统中推广使用。
1 加速度计组件的结构设计
加速度计组件的结构如图1所示,主要包括三个部分:底座、盖板、加速度计安装座。加速度计被螺钉紧固在加速度计安装基座上。为了进行隔热,尽可能地减小加速度计组件与外部环境的热交换,采用导热率极低的垫片固定在安装基座与底座之间。为了尽量减轻整个加速度计组件的重量,对组件底座多处进行掏空,并采用非金属材料尼龙制作盖板。整个加速度计组件与系统的安装基准面之间通过热导率较低的钛合金螺钉固定,其余空间用绝热棉填充。图1(a)为加计组件的整体效果图,1(b)为没有盖板的斜视图,图1(c)为加速度计模型。

图1 加速度计组件的结构设计Fig. 1 Structure design of the accelerometer triad
2 温控方案设计
我所生产的挠性摆式加速度计的温度系数为全温1mg,约为8μg/℃,因此当温控精度为±0.1℃时,加速度计由温度波动带来的误差小于2μg,满足高精度应用的需求,因此温控系统的设计目标值为60±0.1℃。
2.1 温控策略
整体温控的策略如图2(a)所示,控制的目标温度为60℃,上电后满功率从室温加热到55℃。这个过程的时间t1越短越好,称之为粗温控;接下来采用PID算法进行温控,称之为精温控。时间t2之后,达到控温精度。温控所采用的加热片如图2(b)所示,不同于大多数只有两个抽头的加热片,该加热片AB之间的电阻为165Ω,BC之间的电阻为55Ω,B端可看作是两个普通加热片AB和BC的公共端。
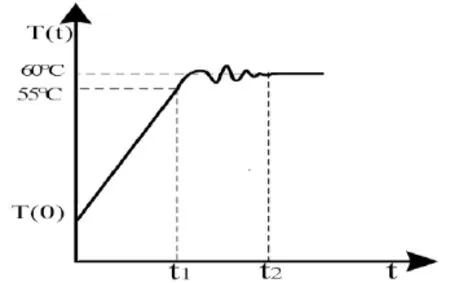
图2(a) 整体温控策略Fig.2(a) Temperature control strategy

图2(b) 三抽头加热片示意图Fig.2(b) Three-electrode heater
将这种带抽头的加热片缠绕在加速度计的圆柱面上(图1(c)),所有的加热片并联,则BC之间的总电阻为18.3 Ω,AB之间的总电阻为55 Ω。满功率加热时,BC接28 V直流电平,得到粗温控时的功率为42.8 W,电流恒定为1.5 A。精温控时,取AB之间的电阻进行加热,得到精温控的瞬时最大功率为14.3 W,瞬时最大电流为0.5 A。总体说来,精温控的最大瞬时功率和最大瞬时电流都是粗温控的33.4%。
2.2 温控硬件设计
图3为整个温控系统的硬件设计方案,主控制器为C8051f单片机,控制算法为普通PID算法。单片机的两个端口输出PWM波给固态继电器1和2,分别对加热片在不同控温阶段进行加热。在粗温控阶段,由于被控温度距离目标温度值较远,采用较小阻值的加热电阻进行加热;在精温控阶段,采用较大阻值的加热电阻进行加热。安装在加速度计基座上的PT1000热敏电阻采集组件的实时温度信息,并通过电阻电压转换电路,将温度转换为电压,输入到单片机,形成闭环。

图3 温控系统的硬件方案Fig.3 Hardware design of the temperature control system
由于组件体积较大,若采用单个PT1000热敏电阻作为温度反馈点,该反馈点的温度会较快达到目标值,但整个系统达到热平衡的时间依然需要比较久。为了尽量减少系统热平衡的时间,将三个PT1000热敏电阻布置在相互之间距离较远的位置,取三个采集点温度的平均值作为被控对象。温控电路板及加速度计组件安装在系统框架的实物图如图4所示。

图4 带有加计的IMU组件及温控电路板实物图Fig.4 The flexure accelerometer triad and temperature control circuit board
3 测试结果及分析
测试主要分为三个部分:第一部分为控温指标测试,包括温控精度和到温时间;第二部分为环境适应性测试,主要模拟在有系统环境温升的情况下,温控的精度能否满足要求;第三部分为加速度计长期稳定性测试,通过连续15 d的通电,对加速度计的输出特性进行测试。
3.1 温控指标测试
加速度计表面贴有AD590温度传感器,用于监测加速度计的温度变化,测试结果如图5所示。

图5 室温下温控测试结果Fig.5 Measurement results of temperature control system in room temperature
刚上电时,进入粗温控阶段,温升速率为0.1℃/s,到55℃后,进入精温控。由于AD590和PT1000安装部位的不同,当加热片的温度为60℃时,PT1000检测到的温度略低于60℃,因此PID反馈控制使其温度继续升高,待加热到60.7℃左右,此时PT1000检测到的温度达到60℃,PID调节使得功率下降,对应图中的温度从60.7℃下降到59.3℃附近,直到被控温度点达到热平衡。稳定工作时,温度的波动在59.313℃~59.221℃之间,波动范围为0.092℃。该温度与目标温度60℃的差距主要来自于PT1000采样电路理论值与实际值的差异。从测试结果可以看出,室温条件下启动,该温控系统在10 min内可以稳定。
3.2 模拟系统温升条件下的测试
在实际使用过程中,惯导系统中的其他电路和器件都会产生热量,测试结果表明该系统的温升速率约为10℃/h,根据系统要求,系统的放置环境温度为5℃~35℃。将加速度计组件放置在温箱中,设定温箱为5℃,保温2 h,然后进行温控实验。实验过程中,设定温箱从5℃以10℃/h的升温速率升温至55℃,得到如图7(1)所示的结果。从图中可以看出,随着外界环境温度的升高,采集到的温度也逐渐升高,外界环境温度变化50℃,带来的加速度计表面温度变化0.67℃。这是由于PT1000电阻电压变换网络的温度系数造成的,PT1000的阻值通过电路转换为电压值输入到8051单片机进行采集,从而得到反馈点的温度,该转换电路的数学表达式为

其中,V1=1.25 V、V2=2.5 V为参考电压,R1=1100Ω,R3=4640Ω,RT为PT1000的电阻值。
为了估算温度漂移带来的影响,当外界环境温度为5℃时,RT的阻值为1019.25Ω,可计算出VT=1.6677 V;当外界环境温度为55℃时,控温60℃时,RT的阻值为1231.00Ω,可计算出VT=688.9 mV。从数据手册可以得到,电压与电阻的温度系数约为50×10-6/℃,设外界环境温度变化50℃时,参考电压与电阻都变化Δ,若考虑温度变化,则式(1)可写为:

带入数据进行计算得ΔVT=13.5mV,因此当外界环境温度为55℃时,PT1000电阻电压变换网络的输出电压702.4 mV,可以解算出RT=1227.48Ω,对应温度为59.08℃,与目标温度有0.92℃的差距,这与实际测量得到的0.67℃基本符合。为了使得温控在外界环境温度变化时依然能够满足60±0.1℃的控温要求,必须对PT1000电阻电压变换网络的温度系数进行补偿。

图6(a) 模拟系统温升未补偿温控效果Fig.6(a) Temperature control results with no compensation in system temperature simulations

图6(b) 模拟系统温升补偿后温控效果Fig.6(b) Temperature control results with compensation in system temperature simulations
将图4所示的加速度计组件和系统框架放入温箱,在5℃~55℃的温度范围内,以10℃为步进,进行保温测试,得到如表1所示的数据。其中,目标温度为程序设定的控制温度,8051温度为单片机集成温度传感器测量得到的温度,监测点温度为加速度计表面温度传感器AD590采集得到的温度,电源电流为28 V恒压电源的输出电流值。闭环控制所采用的控制策略为PID,理想的PID控制可以使得目标值与实际值近似相等,但对于该温控系统,I值不宜过大,这主要是因为该温控系统可通过调节占空比调节升温速率,但降温只能依靠环境的热交换,而热交换与系统与外界的环境温差关系密切,当I值过大,外界环境温度较低时,可以带来非常小的静差,但当外界环境温度升高后,温控系统容易积分饱和,导致温度下降缓慢,影响调节精度。从表2可以看出,随着温箱温度的升高,由于PT1000电阻电压变换网络存在温度系数,反馈点温度、8051温度以及监测点的温度都不断升高,温控的目的是让反馈点的温度在外界环境温度变化时依然趋于稳定。可以看出8051温度传感器大体能够反映外部环境温度的变化情况,因此可通过8051的温度传感器对目标温度进行修正。以温箱5℃时的监测点温度60.00℃为参考,近似认为目标温度与监测点温度为线性关系,可以得到补偿目标温度与8051温度的关系,例如当环境温度为45℃,目标温度应为60.00℃-0.47℃=59.53℃,以此类推,可以得到补偿目标温度与8051温度的关系如表2所示。另外,8051测得的温度与温箱设定温度近似线性,因此可以将8051的温度视为环境温度进行温度补偿。

表1 加速度计组件的变温测试结果Tab.1 Test results of accelerometer triad under variable temperature

表2 补偿目标温度与8051温度关系Tab.2 Relationship between compensation target temperature and 8051 temperature
用三次多项式y=A+Bx+Cx2+Dx3对8051温度与补偿目标温度进行拟合,得到如图7所示的拟合曲线。

图7 补偿目标温度与8051温度的曲线拟合Fig.7 The target compensation temperature and 8051 temperature polynomial fitting
从图7可以看出,补偿目标温度与8051温度曲线基本符合三次多项式关系,拟合效果理想。将8051采集得到的温度作为输入,利用拟合公式计算得到温度作为目标温度进行PID控制,可以很好地对PT1000电阻电压变换网络的温度系数进行补偿。同样,设定温箱从5℃以10℃/h的升温速率升温至55℃,得到如图7(2)所示的结果,当外界环境温度变化50℃,监测点温度仅变化0.15℃,符合60±0.1℃的精度要求。
3.3 加速度计长期稳定性测试结果
给加速度计组件通电,在温控条件下进行连续通电15 d的测试,每8 h进行一次标定,最终的结果如图8(a)和图8 (b)所示。

图8 连续通电15 天加速度计测试结果Fig.8 Accelerometer measurement results with 15 d continuous experiments
从图8可以看出,在连续通电15 d的情况下,三轴加速度计的刻度系数变化小于10×10-6,其输出偏值稳定性在10 μg以内,可以满足高精度的应用要求。
4 总结与展望
本文针对单晶硅摆式挠性加速度计的高精度、工程化应用,设计了加速度计组件,针对大部分温控系统普遍存在的温控瞬时电流过大问题,提出了一种带抽头的加热片结构,将温控过程分为两个阶段,即粗温控和精温控,不同的温控阶段采用不同阻值的加热电阻,解决了瞬时电流过大问题。最终测试结果表明,该系统的温控精度为60±0.1℃,到温时间小于15 min。该温控方案具有很好的环境适应性,该方法可推广至任何需要进行高精度温控的场合。连续通电15 d测试实验表明,三轴加速度计的刻度系数K1变化小于10×10-6,输出残差在10 μg以内,可以推广至各类高精度的应用场合。
(References):
[1] Bereska D, Daniec K, Llewicz W, et al. Influence of temperature on measurements of 3-axial accelerometers and gyroscopes: Embedded into inertial measurement unit[C]//International Conference on Signals & Electronic Systems. 2016: 200-205.
[2] Alaluev R V, Ivanov Yu V, Malyutin D M, et al. Highprecision algorithmic compensation of temperature instability of accelerometer’s scaling[J]. Automation and Remote Control, 2011, 72(4): 853-860.
[3] Guo Wei, Ceng Li, Yan Wu. Application of least squaressupport vector machine in system-level temperature compensation of ring laser gyroscope[J]. Measurement, 2011,44(10): 1898-1903.
[4] Chen F, Zhang K. Identification for temperature model and the method for temperature compensation of quartz flexible accelerometer[C]//IEEE Advanced Information Technology, Electronic & Automation Control Conference. 2015: 841-845.
[5] 李汉舟, 潘泉, 王小旭, 等. 温控和温补相结合的高精度激光惯性导航系统[J]. 中国惯性技术学报, 2013,21(5): 585-590.Li Han-zhou, Pan Quan, Wang Xiao-xu, et al. High precise LINS based on temperature control combined with temperature compensation[J]. Journal of Chinese Inertial Technology, 2013, 21(5): 585-590.
[6] Baumann H, Klingele E E, Marson I. Absolute airborne gravimetry: A feasibility study[J]. Geophysical Prospecting, 2012, 60(2): 361-372.
[7] Jekeli C. Accuracy requirements in position and attitude for airborne vector gravimetry and gradiometry[J]. Gyroscopy and Navigation, 2011, 2 (3): 164-169.
[8] Hao J, Liu B. Design and realization of temperature control system for FOG POS based on DSP[C]//International Conference on Measuring Technology & Mechatronics Automation. 2011: 906-910.
[9] Yang D, Woo J K, Najafi K, et al. ±2ppm frequency drift and 300x reduction of bias drift of commercial 6- axis inertial measurement units using a low-power ovencontrol micro platform[C]//Sensors. 2016: 1-4.
[10] 卫瑞, 康冰, 孙谦. 基于光学捷联惯组的精密温控系统设计[J]. 导弹与航天运载技术, 2014, 335(5): 78-81.Wei Rui, Kang Bing, Sun Qian. Design of exact temperature control system based on optics strapdown inertial measurement unit[J]. Missiles and Space Vehicles,2014, 335(5): 78-81.
[11] 何海洋, 王章波. 基于温控方案的一种MEMS惯性测量装置设计[J]. 计测技术, 2014, 34(3): 28-31.He Hai-yang, Wang Zhang-bo. Design of MEMS inertial measurement unit based on temperature-controlling scheme[J]. Metrology & Measurement Unit, 2014, 34(3): 28-31.
[12] Fu Jun, Jiang Sai, Qin Fang-jun, et al. Novel piecewise compensation method for FOG temperature error[J]. Journal of Chinese Inertial Technology, 2016, 24(2): 242-244.
Engineering realization of high-precision silicon flexure accelerometer triad
ZHAO Hu, WANG Song-li, LIU Hai-bin, ZHANG Yao-shun, LI Peng-fei
(AVIC Xi’an Flight Automatic Control Research Institute, Xi’an 710065, China)
In view of the engineering application requirements of high-precision silicon flexure accelerometer, an accelerometer triad and its temperature control system are designed and fulfilled. To solve the problem that most PWM-based temperature control systems have too large instantaneous current, a tapped heater with three electrodes is designed, in which the temperature control process is divided into the coarse temperature controlling phase and the precise one, and the electrodes used in the two phases are different.Measurement results show that, when the target temperature value is set to 60℃, and the surrounding temperature is changed from 5℃ to 55℃, the temperature stable time is less than 15 min, the temperature control precision is within ±0.1℃, and the instantaneous current of the precise temperature controlling phase is 33.4% of the coarse temperature controlling phase. The 15 days continuous experiments show that the K1is less than 10×10-6, and the K0is less than 10μg, meeting the high-precision engineering applications.
flexure accelerometer triad; three-electrode heater; temperature control system; engineering
U666.1
:A
1005-6734(2017)03-0360-05
10.13695/j.cnki.12-1222/o3.2017.03.015
2017-03-16;
:2017-05-27
火箭军武器装备(高精度惯性平台技术)(30401030302)
赵虎(1987—),男,博士研究生,从事摆式加速度计研究、微机电机械系统研究。E-mail: zhaohu870126@163.com
联 系 人:李鹏飞(1980—),男,高级工程师,从事单晶硅摆式加速度计研究。E-mail: 618gdb104@facri.com
