基于恒转矩变速系统的送钻控制模式研究
2017-09-11王玉明龚治滨杨砚杭杨怀建杨冰洁
王玉明,龚治滨,杨砚杭,杨怀建,杨冰洁
(1.天水电气传动研究所有限责任公司,甘肃天水741020;2.渤海钻探第五钻井工程分公司装备科,河北河间062465;3.中国石油渤海钻探第四钻井公司,河北任丘062550)
基于恒转矩变速系统的送钻控制模式研究
王玉明1,龚治滨2,杨砚杭3,杨怀建2,杨冰洁3
(1.天水电气传动研究所有限责任公司,甘肃天水741020;2.渤海钻探第五钻井工程分公司装备科,河北河间062465;3.中国石油渤海钻探第四钻井公司,河北任丘062550)
基于恒转矩的变速系统,研究了几种送钻控制模式,分别给出了系统控制框图,并简单介绍了实现控制的主要思路、方法,根据具体配置计算了各种模式下控制效果的最高理论精度。
恒转矩变速;送钻;控制模式;精度
1 引言
本文介绍的恒转矩变速系统是指以转矩负反馈为内环、以转速负反馈为外环的电气变速系统。电驱动钻机绞车、转盘/顶驱、泥浆泵的变速控制系统结构基本上都采用此种方式。对基于恒转矩变速系统的送钻控制,虽然其控制模式多种多样,但无论对于机械还是电动钻机,控制系统的结构框架基本上完全一致,本文以7000m变频钻机为例,就其常用控制模式及其精度指标进行研究。
2 送钻控制模式及精度
2.1 恒钻速
恒钻速以钻头下钻速度为控制目标。由于下钻速度与拖动电机之间有固定的比例关系,电机速度按一定的比例变换后即可作为下钻的实际速度,因此控制结构就是基本的恒转矩变速系统,其结构如图1所示。控制精度取决于控制系统基础精度和速度反馈的采集精度。对于常用的16位数字控制系统,其精度为 1/214=1/16384≈0.00006,例如对选用额定转速为1500rpm的电机,可控精度为 1500×0.00006≈0.1rpm。

图1 恒转矩变速系统框图
2.2 恒钻压
恒钻压以钻头钻进时的钻压为控制目标。为达此目的,需要构造钻压负反馈闭环控制单元,该单元一般配置成P(比例)或PI(比例+积分)控制器。由于无法直接检测井下钻头的实际钻压,因此反馈钻压一般通过死绳固定系统的压力传感器间接获取。控制结构如图2所示。控制精度取决于钻压控制单元基础精度和实际钻压的采集精度。对常用的16位数字控制系统,实际能够达到的控制精度取决于压力传感器最大输出所对应的最大钩载。以4000m和7000m电动钻机为例,最大钩载为225T和450T,标准的压力传感器输出为0(4)mA-20mA或0V-10V,虽然有16位的数字资源,但限于实际模数转换精度,最高只有10或11(其他几位几乎均为噪声) 位,即 1/210≈0.00098 或 1/211≈0.00049 分辨率,对应钻压可控理论精度为 225(450)T×0.00098=218(436)kg或 225(450)T×0.00049=109(218)kg。由于死绳固定系统及压力传感器目前只有标准的装置可供选择,由上述关系可见,随着钻机规格的减小或增大,钻压的控制精度越来越高或越来越低。为了提高7000m以上钻机钻压的控制精度,可以采用双传感器切换或定制专用传感器等办法。

图2 恒钻压控制系统框图
2.3 线路恒压力
线路恒压力是以泥浆循环线上地面以上线路的某个点压力恒定为控制目标的。为达此目的,需要构造压力负反馈闭环控制单元,该单元一般配置成P(比例)或PI(比例+积分)控制器。实际线路压力检测一般通过标准的传压包和传感器获得,控制结构如图3所示。控制精度取决于控制单元基础精度和传感器最大输出所对应的最高压力配置,传感器的采集精度与恒钻压控制的一样,最高只有 10 或 11 位,即 1/210≈0.00098 或 1/211≈0.00049,当配置的传压包最高压力为25MPa或50MPa时,对应线路压力控制的理论精度为25(50)MPa×0.00098=24.5 (49)kPa 或 25 (50)MPa×0.00049=12.3(24.5)kPa。由上述关系可见,随着传压包所对应压力的减小或增大,线路压力的控制精度将提高或者降低。

图3 线路恒压力系统框图
2.4 转盘/顶驱恒功率
转盘/顶驱恒功率以转盘/顶驱输出功率恒定为控制目标,为达此目的,需要构造功率负反馈闭环控制单元,该单元一般配置成P(比例)或PI(比例+积分)控制器。转盘/顶驱的实际功率检测一般通过为其供电的电控装置通过其I/O接口间接获得,控制结构如图4所示。控制精度取决于控制单元和供电装置的精度。常用的数字控制和供电装置一般为 16 位,即 1/214=1/16384≈0.00006。当转盘/顶驱拖动电机的额定功率为400(800)kW时,功率控制的理论精度为 400(800)kW×0.00006=24(48)W。

图4 恒功率控制系统框图
2.5 转盘/顶驱恒扭矩
转盘/顶驱恒扭矩以转盘/顶驱输出扭矩恒定为控制目标,为达此目的,需要构造扭矩负反馈闭环控制单元,该单元一般配置成P(比例)或PI(比例+积分)控制器。转盘/顶驱的实际扭矩检测一般通过为其供电的电控装置通过其I/O接口间接获得,控制结构如图5所示。控制精度取决于控制单元的基础精度和供电装置扭矩的字长。常用的数字控制和供电装置扭矩的字长一般为16位,即1/214=1/16384≈0.00006。当转盘/顶驱供电单元电机的参数如表1所示时,扭矩控制的理论精度为10324(5860)Nm×0.00006=0.62(0.35)Nm。

表1 YJ系列变频电机技术参数
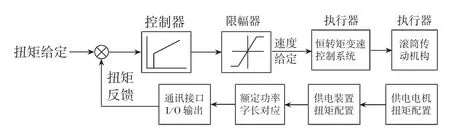
图5 恒转矩控制系统框图
3 结束语
上述几种送钻控制模式在实际钻井中都有应用,由于追求的目标不同,不同模式控制效果没有比较性,各有其优缺点,各有其最佳适用的钻井阶段,各种控制模式下的实际精度随钻机规格、送钻机构配置、传感器输出对应最大标定等因素影响,不可一概而论。对于送钻控制系统集成商,要求实现各种模式的最大值互相保护,实际使用时由操作者根据需要自由选择。
[1]李才良、朱奇先等.石油钻机电气自动送钻控制研究[J].电气传动自动化,2014,36(6):10-12.
[2]陈如恒、沈家骏.主编,钻井机械的设计计算[M].北京:石油工业出版社,1995.
[3]楼一珊、李琪主编,龙芝辉、熊青山副主编,钻井工程[M].北京:石油工业出版社,2013.
[4]刘铁范编.钻井仪表[M].北京:石油工业出版社,1993.
Research on drilling control mode based on constant torque transmission system
WANG Yu-ming1,GONG Zhi-bin2,YANG Yan-hang3,YANG Huai-jian2,YANG Bing-jie3
(1.Tianshui Electric Drive Research Institute Co.,Ltd.,Tianshui 741020,China;2.The 5th Drilling Company of BHDC,Hejian 062465,China;3.The 4th Drilling Company of CNPC Bohai Drilling Engineering Co.,Ltd.,Renqiu 062550,China)
Based on constant torque transmission system,the several kinds of drilling control modes and the system control block diagrams are put forward.The main ideas and the methods are present.ed according to the configuration,the highest control accuracy of in different modes is calculated.
constant torque transmission;drilling;control mode;accuracy
TE922
A
王玉明(1986-),男,毕业于甘肃机电技术学院,专科,助理工程师,就职于天水电气传动研究所有限责任公司。
2017-05-01
1005—7277(2017)02—0023—03
