双Buck交流电压调节器的建模与仿真
2017-09-11郑帅
郑 帅
(国网湖南省电力公司永州供电分公司,湖南永州425002)
双Buck交流电压调节器的建模与仿真
郑 帅
(国网湖南省电力公司永州供电分公司,湖南永州425002)
斩控调压控制技术作为一种新型交流调压技术,解决了相控调压技术含有大量不易滤除谐波和功率因数较低等问题,是一种很有发展前景的调压技术。双Buck交流电压调节器的拓扑解决了传统AC/AC变换器开关器件死区电感过电压等问题,控制方式也比较简单。建立双Buck交流电压调节器数学模型和控制模型,并对其控制环路校正进行了设计。
电压调节器;Buck;PI校正
1 引言
2 双Buck交流斩波器工作原理
双Buck交流斩波调压器的拓扑结构如图1所示,是在传统Buck斩波器的基础上,将IGBT器件和二极管的同向串联组合,阻断了IGBT器件在开通时的电流反向流动,这样使IGBT器件和串联二极管组成的一个具有单向性组合器件,从拓扑上避免了传统Buck斩波器的死区设计。这个拓扑是由两个Buck电路拓扑输出并联组成,分别工作在电源电压正负半周[1]。

图1 双Buck交流斩波调压器的拓扑结构
3 数学模型
在建立其数学模型的时候,可以简化成传统的单相Buck交流斩波器的模型,利用状态空间平均方法对Buck交流斩波调压器建立小信号模型[2-5]。如图2所示,L为输出滤波电感,C为输出滤波电容,负载为R,稳态下的占空比为D。
为简化系统分析,假设斩波电路的双向电子开关由高频脉冲信号控制开通关断,高频脉冲信号开关频率远远大于50Hz,输入LC低通滤波器参数较小。忽略输入LC低通滤波器对数学模型参数的影响。简化Buck交流斩波调压器如图2所示。

图2 Buck交流斩波调压器简化图
这个电路交替工作在两种状态,即S1闭合S2断开时(0<t<dTS)和 S1断开 S2闭合时(dTS<t<TS)。状态变量取 x=[iLuC],输出变量取 y=[uoiS]。得到Buck交流斩波电路状态空间平均方程为:

当输入电压有变化或有扰动时,会对状态变量、占空比、输出变量产生影响,令瞬时值等于稳态值加扰动值,分离扰动并经过线性化处理可得出交流小信号状态方程和输出方程。其中系数矩阵为Ax、Bx、Cx(x=1、2)

进行拉氏变换可得

由式(4)可得到以下传递函数:
近年来,各高校投入了大量经费用于学科技术建设和实验室建设改造,为跟上时代步伐,对实验仪器进行了大量更新,各实验室都添置了大量的新型仪器,学校的综合实力得到了提高,实验教学的设施条件得到了明显的改善。但同时,各实验室也积累了大量闲置和淘汰的仪器设备;实验室的仪器、设备,必然要报废、淘汰、更新,这是无可非议的。但如何处理这些数额庞大的淘汰仪器,更科学、更合理地利用资源,使之发挥更多作用,是值得思考的。若能变“废”为“宝”,有效利用,不仅能为学校节约可观的资源,还可另辟“蹊径”,打开一条锻炼学生动手能力、拓展思维空间之路。


4 双Buck交流斩波调压器的控制模型
4.1 PWM 调制器模型
PWM调制器主要由比较器和载波发生器组成。经比较输出脉冲波的实现方式如图3所示,图中utri为三角载波,幅值为Utri,um为调制信号,S为脉冲序列。
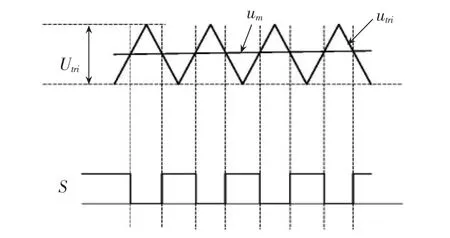
图3 PWM调制器模型
由于三角载波utri频率远大于调制波um的频率,故在一个开关周期内,由图3几何关系近似有:

式中Utri为三角载波utri的幅值,〈um(t)〉TS为调制波um在一个开关周期的平均值,在引入小信号扰动,分离扰动并线性化处理得到:

4.2 斩波器控制模型
由式(5)、(6)和(8)得到状态变量到输出的传递函数,占空比到状态变量的传递函数以及调制信号到占空比的传递函数,可以建立斩波器电压有效值闭环控制模型,如图4所示。

图4 控制模型框图
图4中ur(s)为输出电压的给定,G1(s)为电压误差补偿网络的传递函数其中Kp是PI调节器比例参数,Ki是PI调节器积分参数,K1为输出电压反馈的增益,为PWM放大器的增益。
由图4经补偿的电压环路开环传递函数记为G(s),未经补偿电压环路开环传递函数的记为G*(s)

带入以下数据可得到,R=10Ω、Ui=220V、Utri=1V、L=4×10-4H、C=4.7×10-6F。
滤波器的转折频率为:

计算得出 ωT=23063rad/s。

图5 校正前后幅频特性图
校正前后幅频特性曲线如图5所示,其中实线1为被控系统校正前的幅频特性曲线,虚线2为PI控制器的幅频响应曲线,虚线3为被控系统校正后的曲线。从虚线3可以看出,校正后较大地抑制了高频部分,在转折频率以后曲线以-40dB/dec衰减,保证了对高频段的抑制,在低频段区间曲线以-20dB/dec衰减。设计PI控制器参数时,通常把PI控制器的传递函数的零点选取在变换器输出滤波器的转折频率处。
在变换器输出滤波器的转折频率fr确定了之后,选取穿越频率fC要根据需要综合考虑。如果穿越频率选取太低,则会减小低频增益,会降低系统的快速动态响应性能;如果穿越频率靠近变换器输出LC低通滤波器的转折频率,虽然在低频部分有助于获得较大的增益,这有助于提高系统的快速动态响应性能。但这时不利于对高频部分的抑制。同时,如果穿越频率非常靠近变换器输出LC低通滤波器的转折频率,会使补偿后系统的相角裕度ωp太小。综合考虑斩波器的穿越频率fC选取为转折频率 fr的 1/10,即:

由于在穿越频率处的增益为1,故有:

结合式(10)(11)和(12)可得到:

带入数据可计算出 PI控制器参数:Kp=4.5×10-4,Ki=10.369。
所以补偿网络传递函数为:

校正后的传递函数为:


图6 校正前后的波特图
校正前后其波特如图6所示,图6中曲线1、曲线2、曲线3分别代表系统校正前、PI校正环节以及系统校正后的幅频响应曲线和相频响应曲线。系统校正前中频频域过宽,所以在校正时减小带宽,提高低频增益,并加速高频衰减。根据开关电源的一般规律,应使系统经校正后的传递函数的相角裕度 λ>45°,幅值裕度 h>6dB[6][7]。系统校正后相角裕度为90.4°,幅值裕度41.7dB,说明经PI校正后的系统具有很好的稳定性。
5 仿真验证
为了验证斩波调压电路抵御电网电压波动的能力,本文采用Matlab/Simulink仿真软件中的受时间控制的电源来模拟电网电压的波动,使用由外部时间触发的受控开关,设定开关在0.2s进行状态切换,图7为电压峰值由311V变为342V输入和输出波形图,图8为电压峰值由311V变为279V输入和输出波形图。

图7 电网电压在0.2s时波动+10%时波形图
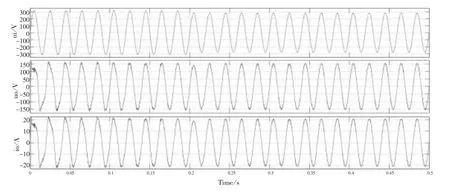
图8 电网电压在0.2s时波动-10%时波形图
由图7和8可以看出,电网电压在0.2s分别波动+10%和-10%,斩波器输出电压仍然经过短时间调整后保持在设定值150V,其调整时间约为0.05s,这就表明本系统在电网电压波动的情况下,仍然可以保证稳定输出。
6 结束语
本文建立了双Buck交流电压调节器的数学模型和电压有效值闭环控制的控制系统模型。并对控制环路进行了分析和设计,完成了对控制环路的校正。在Matlab/Simulink仿真环境下进行了建模仿真,验证了PI校正设计的正确性和可行性。仿真结果表明,调节器在电网电压波动10%的情况下,能够快速响应,稳定输出电压。
[1]洪 峰,孙 刚,蔡兆奇,王慧贞,严仰光.双Buck双向交流斩波器[J].中国电机工程学报,2008:28(18):18~22.
[2]徐德鸿.电力电子系统建模及控制[M].北京:机械工业出版社,2006.
[3]张 兴.高等电力电子技术[M].北京:机械工业出版社,2011.
[4]V.Vorperian.Simplified Analysis of PWM Converters Using Model of PWM Switch,Part II,IEEE Trans.on Areospace and Electronic Systems,1990,26(3):500-505.
[5]杨 阳.Buck型交流斩波调压器研究[D].上海交通大学,2012.
[6]胡寿松主编.自动控制原理[M].北京:国防工业出版社,1994.
[7]张占松,蔡宣三,开关电源的原理与设计(修订版)[M].北京:北京电子工业出版社,2004:525-529.
Modeling and simulation of dual Buck AC voltage regulator
ZHENG Shuai
(State Grid Yongzhou Power Supply Company,Yongzhou 425002,China)
As a new type of AC voltage regulating technology,the chopping control technology solves the problems that the phase control technology is not easy to filter a lot of harmonic and the power factor is low.It is a promising voltage regulating technology.The topology of dual Buck AC voltage regulator solves the over-voltage problem of dead zone inductance of switch device for traditional AC /AC converter,and the control method is simple.So the mathematical model and control model for dual Buck AC voltage regulator are established,and the control loop correction is also designed.
voltage regulator;Buck;PI correction
TM41
A
郑 帅(1987-),男,助理工程师,研究方向为电力电子技术及其在电力系统中的应用。
2017-05-01
1005—7277(2017)02—0031—04
