基于车路协同的高速公路入口匝道车辆汇入引导方法*
2017-09-11张存保李劲松黄传明夏银霞
张存保 李劲松 黄传明 夏银霞
(武汉理工大学智能交通系统研究中心1) 武汉 430063) (武汉市公安局交通管理局2) 武汉 430022)
基于车路协同的高速公路入口匝道车辆汇入引导方法*
张存保1)李劲松2)黄传明2)夏银霞1)
(武汉理工大学智能交通系统研究中心1)武汉 430063) (武汉市公安局交通管理局2)武汉 430022)
为提高高速公路入口匝道区域交通安全和通行效率,提出了基于车路协同的高速公路入口匝道车辆汇入引导方法和模型.根据车路协同系统获取的各车辆实时位置和速度信息,在主线外侧车道上搜寻合适的匝道车辆汇入间隙,或通过调节主线外侧车道的车速形成合适的汇入间隙,在此基础上确定匝道车辆汇入时间、汇入位置、汇入车速等,并引导匝道车辆顺利汇入主线.利用Vissim交通仿真软件的COM接口,编程实现了车路协同环境下高速公路入口匝道车辆汇入引导功能,并针对主线和匝道流量分别处于低峰、平峰和高峰的情况进行了仿真实验.结果表明,与无车辆汇入引导情况相比,在主线交通流量处于低峰、平峰、高峰三种情况下,该方法可使入口匝道交通延误分别降低15.6%,20.9%和19.2%,并使交通冲突数分别降低17.9%,23.5%和32.3%,可有效改善高速公路入口匝道区域交通运行状况.
交通工程;汇入引导;入口匝道;车路协同系统;高速公路
0 引 言
针对高速公路匝道区域交通安全问题,国内外学者开展了大量研究.李嘉等[1]对匝道和变速车道的设计进行了安全性分析,提出高速公路出入口设计中应注意行车速度、匝道平面线形、匝道纵面线形等因素.Mccartt等[2-3]对匝道区域交通事故特性进行了分析,并对加/减速车道长度与事故率关系进行了研究.Lord等[4-5]以事故统计数据为基础,建立了互通式立交匝道与加/减速车道事故的预测方法及模型.李志斌等[6]针对高速公路入口匝道路段,建立了追尾事故风险的量化预测模型,并提出了减少事故发生概率的可变限速控制策略.杨鹏飞[7]针对匝道车辆汇入主线时容易与后方车辆发生碰撞事故的问题,提出了一种匝道车辆汇入安全性提示系统.
车路协同系统是指基于无线通信、传感探测等技术获取车辆和道路信息,通过车车、车路通信进行信息交互和共享,实现车辆与基础设施之间智能协同与配合,达到优化利用系统资源、提高道路交通安全、缓解交通拥堵的目标[8].车路协同系统能全方位获取车辆个体的时空状态信息,为改善高速公路匝道区域交通安全和通行效率提供了技术基础和支持条件.金立生等[9-10]分析了高速公路合流区交通事故特征,运用车路协同技术建立了入口匝道合流区车辆安全预警方法和模型.杨晓芳等[11]利用车车通信环境下获得的周边车辆运行状态信息,提出了入口匝道合流影响区车辆决策机制模型,提高了合流区的通行能力.Park等[12]针对车路协同环境,提出通过高速公路主线车辆换道来为匝道车辆提供更多的可汇入间隙,并建立了主线车辆换道模型.王云鹏等[13]提出了车路协同环境下自动驾驶车辆在入口匝道处的安全汇入方法和模型.Hayat等[14]研究并建立了车路协同环境下匝道汇入车辆安全辅助驾驶系统,降低了高速公路入口匝道区域的车辆汇入冲突.
综上所述,现有研究大多是为合流区车辆提供安全预警和换道提示,或者以自动驾驶车辆为研究对象,在面向驾驶员的入口匝道车辆汇入引导方面的研究较少.为此,本文在充分利用车路协同系统获取的车辆个体实时运行状态信息基础上,建立高速公路入口匝道车辆汇入引导方法和模型,为提高入口匝道区域交通安全性和通行效率提供技术基础.
1 车路协同环境下入口匝道车辆汇入引导的基本思路
充分利用车路协同系统获取的各车辆实时位置和速度信息,在入口匝道区域较大范围内搜索最佳的汇入间隙和汇入位置,并引导匝道车辆顺利汇入主线外侧车道,可有效提高入口匝道区域交通安全和通行效率.
入口匝道车辆汇入引导的关键问题是找到最佳的汇入间隙,并确定汇入点位置和汇入引导速度.为此,将匝道入口上游部分路段至加速车道末端作为监测区域(监测区域长度通常为1 000~1 200 m),首先在监控区域内的主线外侧车道上,寻找满足最小安全汇入间隙的空档(根据实际高速公路观测数据,小汽车的最小安全汇入间隙可取为4.0 s,大中型车辆的最小安全汇入间隙可取为4.9 s).若找到满足要求的目标间隙且匝道车辆经过速度调整后能安全汇入上述目标间隙,则确定汇入时间、汇入位置、汇入车速并引导匝道车辆顺利汇入主线.若主线外侧车道上未找到合适的汇入间隙,则依次将匝道车辆当前位置对应的主线外侧车道空档及其后续空档作为目标间隙,判断能否通过降低目标间隙的后车速度(车速不小于最低限速),使目标间隙满足最小安全汇入间隙要求且匝道车辆经过速度调整后能安全汇入此目标间隙.若能,则确定汇入时间、汇入位置、主线车辆引导速度、匝道车辆引导车速等,并同时对主线车辆和匝道车辆进行引导以顺利完成汇入过程.若仍未找到合适的汇入间隙,则以1 s为周期实时更新各车辆运行状态信息,并按照上述过程重新搜索,直至找到合适的目标间隙为止,见图1.

图1 基于车路协同的高速公路入口匝道车辆汇入引导示意图
按照上述基本思路,确定了车路协同环境下入口匝道车辆汇入引导的工作流程,见图2.

图2 基于车路协同的入口匝道车辆汇入引导的工作流程
2 车路协同环境下入口匝道车辆汇入引导方法和模型
2.1 基于主线外侧车道目标间隙搜索的匝道车辆汇入引导方法和模型
对于实际高速公路来说,主线外侧车道任意车辆A,B和匝道车辆R均处于动态行驶状态.在当前时刻t,各车辆与监测区起点的距离分别为XA(t),XB(t),XR(t),在t+Δt时刻各车辆与监测区起点的距离分别为XA(t+Δt),XB(t+Δt),XR(t+Δt),见图3.
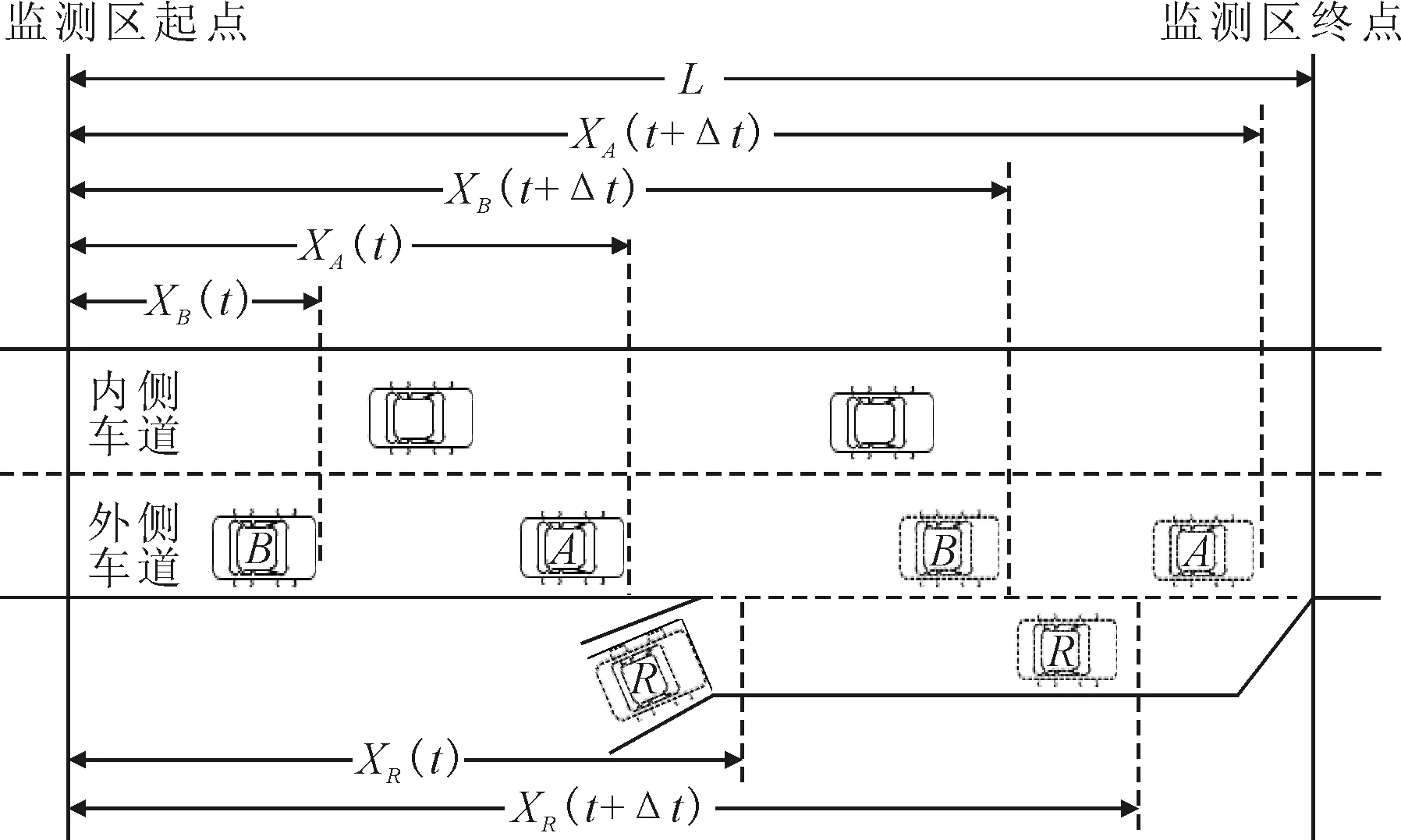
图3 高速公路主线和匝道车辆行驶状态示意图
在主线外侧车道搜索目标间隙的详细步骤如下.
步骤1 根据当前时刻主线外侧车道上各车辆的位置和速度,计算各车辆间的车头时距.即

(1)
式中:TAB为车辆A,B间的车头时距;vB(t)为当前时刻后车B的速度.
对于高速公路外侧车道上最靠前的车辆,则计算其到达监测区域终点的时间间隔;对于外侧车道上最靠后的车辆,则用其与监测区域起点的距离除以路段限速值作为该空档对应的时间间隔.
步骤2 逐个判断外侧车道上各空档是否满足最小安全汇入间隙T0要求.若满足,则将其作为候选的目标间隙.
步骤3 按照从监测区域下游至上游的方向,依次判断匝道车辆R能否安全汇入候选的目标间隙,并确定汇入引导方案.
对于任一候选目标间隙,若匝道车辆R以加速度aR匀加速行驶(车速不超过限速值vmax),在到达加速车道末端之前,判断其是否可超越候选目标间隙的后车B一段安全距离D0(通常可取为80~100 m),若是,则车辆R经加速后能顺利汇入该目标间隙.否则,车辆R无法汇入该目标间隙.
假定当前时刻为t,匝道车辆R汇入主线时刻为t+Δt,则t+Δt时刻车辆A,B,R距离监测区域起点的距离分别为
XA(t+Δt)=XA(t)+vA(t)·Δt
(2)
XB(t+Δt)=XB(t)+vB(t)·Δt
(3)
XR(t+Δt)=XR(t)+vR(t)·Δt+aR·Δt2/2
if (vR(t)+aR·Δt)≤vmax
(4)
或

vmax·[Δt-(vmax-vR(t))/aR]
if (vR(t)+aR·Δt)>vmax
(5)
t+Δt时刻车辆R的速度为
vR(t+Δt)=min(vR(t)+aR·Δt,vmax)
(6)
令XR(t+Δt)≥XB(t+Δt)+D0,两边取等号并求解方程可得
if (vR(t)+aR·Δt)≤vmax
(7)
或

if (vR(t)+aR·Δt)>vmax
(8)
由式(7)~(8)可知,Δt的值与车辆R的加速度aR密切相关,由于aR并非定值,使得方程解Δt值也不唯一.为降低匝道车辆延误,将aR取为较大的加速度值1.2 m/s2,带入式(7)~(8)中得到Δt值,并检验是否满足如下约束条件:
XB(t+Δt)+D0≤XR(t+Δt) (9) XR(t+Δt) (10) 若满足上述约束条件,表明车辆R能在加速车道上完成加速并顺利汇入主线目标间隙,此时Δt值即为可行解.当方程的两个解均为可行解时,为提高匝道车辆汇入效率,选择Δt值较小的可行解而舍弃Δt值较大的可行解.若未找到可行解,则以0.1 m/s2为单位逐步减小车辆R加速度aR值,重新计算方程解,直至找到满足要求的可行解为止. 至此,将汇入时间、汇入点位置、汇入引导车速等信息发送给匝道车辆R,同时提示主线车辆A和B有匝道车辆汇入请保持当前车速行驶,从而实现匝道车道R安全、高效汇入目标间隙.若最终未找到满足要求的可行解,则采用调节主线外侧车道上车辆速度的方式来形成目标间隙. 2.2 基于主线车速调节的匝道车辆汇入引导方法和模型 步骤1 调节主线外侧车道的车辆速度,形成满足最小安全汇入间隙的空档.依次将匝道车辆当前位置对应的主线外侧车道空档及其上游空档作为目标间隙,判断能否通过降低目标间隙的后车速度(车速不小于最低限速值vmin,以保证主线车辆的通行效率),使目标间隙满足最小安全汇入间隙要求. 首先选定匝道车辆当前位置对应的主线外侧车道空档,假设该空档的前车A保持当前行驶速度,后车B以舒适减速度aB减速行驶(减速度值通常取为1.5 m/s2),在前车A到达加速车道末端时,判断车辆A和B的车头时距TAB是否满足最小安全汇入间隙要求.前车A到达加速车道末端所需要的时间t1为 (1) 前车A到达加速车道末端时,后车B的速度及其与监测区域起点的距离为 vB(t+t1)=max(vB(t)-aB·t1,vmin)(12) if (vB(t)-aB·t1)≥vmin (13) 或 vmin·[t1-(vB(t)-vmin)/aR] if (vB(t)-aB·t1) (14) 车辆A和B的车头时距 (15) 判断TAB≥T0是否成立.若成立,则将该空档作为候选的目标间隙,并进入步骤2判断匝道车辆R能否顺利汇入此目标间隙.若能,则引导车辆R安全汇入此目标间隙;若不能,则将上游紧邻该目标间隙的空档作为新的目标间隙,重复上述分析过程.依此类推,直至主线外侧车道上所有空档都搜索完毕为止. 步骤2 判断车辆R是否能汇入候选目标间隙并确定汇入引导方案 对于任一候选目标间隙,分别对目标间隙的前车A、后车B和匝道车辆R的行驶状态进行预测.假定当前时刻为t,匝道车辆R汇入主线时刻为t+Δt,则t+Δt时刻车辆A,B距离监测区域起点距离及车辆B的速度分别为 XA(t+Δt)=XA(t)+vA(t)·Δt (16) XB(t+Δt)=XB(t)+vB(t)·Δt-aB·Δt2/2 if (vB(t)-aB·Δt)≥vmin (17) 或 vmin·[Δt-(vB(t)-vmin)/aB] if (vB(t)-aB·Δt) (18) vB(t+Δt)=max(vB(t)-aB·Δt,vmin) (19) t+Δt时刻车辆R的速度及其与监测区起点的距离分别为 vR(t+Δt)=min(vR(t)+aR·Δt,vmax)(20) XR(t+Δt)=XR(t)+vR(t)·Δt+aR·Δt2/2 if (vR(t)+aR·Δt)≤vmax (21) 或 vmax·[Δt-(vmax-vR(t))/aR] if (vR(t)+aR·Δt)>vmax (22) 令XR≥XB+D0,两边取等号并求解方程,即可得到Δt值.需要说明的是,由于XB(t+Δt),XR(t+Δt)各有两个计算公式,共有四种组合,写出方程解的一般表达式较为繁琐.由于Δt值不会太大,可采用遍历搜索方法进行求解.将aR取为较大的加速度值1.2 m/s2,将Δt按从小到大顺序依次设定为1,2,3,…,60 s,带入上述方程式,分别计算XA(t+Δt),XB(t+Δt),XR(t+Δt)的值,并判断是否满足下列条件: XB(t+Δt)+D0≤XR(t+Δt) (23) XR(t+Δt) (24) 若满足上述条件,表明车辆R能在加速车道上完成加速并顺利汇入目标间隙,则当前Δt值即为可行解,并停止搜索.若不满足上述条件,则以0.1 m/s2为单位逐步减少aR值,重新搜索Δt的解,直至找到满足要求的可行解为止. 至此,将汇入时间、汇入点位置、汇入引导速度等信息发送给主线车辆A和B,以及匝道车辆R,实现匝道车道安全、高效汇入主线外侧车道. 3.1 实验方案 以武汉市绕城高速公路一个入口匝道为对象,运用VISSIM仿真软件对基于车路协同的入口匝道车辆汇入引导方法进行实验验证.该路段主线为双向4车道,限速100 km/h,入口匝道加速车道长度为190 m.为全面分析本文方法在不同的主线流量和入口匝道流量下的效果,将主线流量和匝道流量分别按照高峰、平峰和低峰等情况进行组合,并分别对无匝道车辆汇入引导和有匝道车辆汇入引导两种场景开展仿真实验,每种流量组合的仿真时间为3 600 s.利用Vissim软件的COM接口函数,编程实现车辆ID、车辆位置、车辆速度等数据的实时采集,以及车速引导、车道变换引导等功能,从而准确模拟车路协同环境下匝道车辆汇入引导过程. 3.2 实验结果及分析 针对主线流量和匝道流量的多种组合方案,将交通冲突数和延误分别作为评价交通安全和通行效率的指标,通过仿真实验得到有、无匝道车辆汇入引导情况下各评价指标的结果,见表1~2. 从实验结果可知: 1) 高速公路主线流量和入口匝道流量对匝道区域延误和交通冲突有明显影响.无论是否采取匝道车辆汇入引导措施,随着主线流量的增加,匝道车辆汇入难度随之增大,使得交通延误和交通冲突数均会明显增加.同样地,在主线流量不变的情况下,随着入口匝道流量的增大,匝道汇入车辆对主线的扰动随之增加,并表现为交通延误和交通冲突数的增长.当主线和入口匝道均为高峰流量时,匝道区域交通延误和交通冲突数均达到较大值. 表1 高速公路主线车辆和匝道车辆平均延误 表2 不同流量下高速公路入口匝道区域交通冲突数 2) 基于车路协同的入口匝道车辆汇入引导方法可有效提高匝道区域交通安全和通行效率.与无匝道车辆汇入引导方式相比,在主线交通流量处于低峰、平峰、高峰三种情况下,本文方法可使入口匝道交通延误分别降低15.6%,20.9%和19.2%,并使交通冲突数分别降低17.9%,23.5%和32.3%. 3) 高速公路主线和匝道流量大小对本文方法的效果有一定影响.当主线和入口匝道均处于低峰流量时,因匝道车辆在无引导情况下也很容易找到汇入间隙,本文方法的效果不够明显;随着主线和匝道流量的增加,本文方法在降低延误和交通冲突数两方面的效果均不断提升.当主线和匝道均为高峰流量时,本文方法在降低延误方面的效果有限,但可显著降低交通冲突数量,其降幅达到36.4%. 为改善高速公路入口匝道区域交通安全和通行效率,提出了基于车路协同的入口匝道车辆汇入引导方法,并建立了匝道车辆汇入时间、汇入位置、汇入车速等的计算方法和模型,实现了入口匝道车辆与主线车辆的实时交互和协同通行.在现有Vissim微观仿真软件基础上,利用其COM接口,编程实现了车路协同环境下高速公路入口匝道车辆汇入引导功能模块,在此基础上开展了仿真实现.结果表明,与无匝道车辆汇入引导相比,本文方法可明显降低入口匝道区域交通延误和交通冲突数量. 本文未考虑入口匝道车辆汇入引导信息作用下驾驶员个体行为特性,同时,对入口匝道区域主线车辆从外侧车道变换至内侧车道的情况也未做充分考虑.上述问题将在后续工作中做进一步研究,并对车路协同环境下入口匝道车辆汇入引导方法和模型加以修改完善. [1]李嘉,方霞.高速公路出入口设计与安全性研究[J].中南公路工程,2003,28(2):31-34. [2]MCCARTT A T, NORTHRUP V S, RETTING R A. Types and characteristics of ramp-related motor vehicle crashes on urban interstate roadways in northern virginia[J]. Journal of Safety Research, 2004,35(1):107-114. [3]BARED J, GIERING G L, WARREN D L. Safety evaluation of acceleration and deceleration lane lengths[J]. Institute of Transportation Engineers Journal, 1999,69(5):50-54. [4]LORD D, BONNESON J. Calibration of predictive models for estimating safety of ramp design configurations[J].Journal of the Transportation Research Board, 2005,19(1):88-95. [5]BONNESON J, ZIMMERMAN K, FITZPATRICK K. Roadway safety design synthesis[R]. College Station:Texas A & M University, 2005. [6]李志斌,刘攀,单肖年,等.高速公路可变限速控制策略安全性效果仿真[J].西南交通大学学报,2013,48(5):942-948. [7]杨鹏飞.一种匝道车辆汇入主干道安全性提示系统[J].汽车实用技术,2015(1):57-58. [8]陈超,吕植勇,付姗姗,等.国内外车路协同系统发展现状综述[J].交通信息与安全,2011,29(1):102-105. [9]金力生,JING B, 靳玉,等.高速公路合流区车间无线通讯安全辅助驾驶研究[J].计算机工程与应用,2009,45(19):207-209. [10]王东柱,宋向辉,朱书善,等.基于车路协同的高速公路合流区安全预警控制方法[J].公路交通科技,2012,29(1):50-56. [11]杨晓芳,郭倩,付强.基于车车通信合流影响区外侧车辆决策模型[J].系统仿真学报,2015,27(5):1112-1119. [12]PARK H, BHAMIDIPATI C S, SMITH B L. Development and evaluation of enhanced intellidrive enabled lane changing advisory algorithm to address freeway merge conflict[J]. Transportation Research Record Journal of the Transportation Research Board, 2011,2243(1):146-157. [13]WANG Y P, Wen J E, TANG W, et al. Automated on-ramp merging control algorithm based on internet-connected vehicles[J]. IET Intelligent Transport Systems,2013,7(4):371-379. [14]HAYAT M T, PARK H, SMITH B L. Connected vehicle enabled freeway merge assistance system-field test: preliminary results of driver compliance to advisory[C]. Intelligent Vehicles Symposium Proceedings, IEEE, Michigan, USA,2014. The Method of Vehicle Merging Guidance at Freeway On-ramp Based on Cooperative Vehicle Infrastructure System ZHANG Cunbao1)LI Jinsong2)HUANG Chuanming2)XIA Yinxia1) (IntelligentTransportationSystemResearchCenter,WuhanUniversityofTechnology,Wuhan430063,China)1)(WuhanTrafficManagementBureau,Wuhan430022,China)2) In order to improve the traffic safety and efficiency of freeway on-ramp area, the merging guidance method and models for on-ramp vehicle based on the Cooperative Vehicle Infrastructure System (CVIS) are put forward. According to the vehicles’ location and speed data collected by CVIS, the merging gap for on-ramp vehicle is selected from gaps on freeway near-side lane, or the merging gap was created by adjusting the speed of vehicle on near-side lane. After that, the merging time, merging point and merging speed are calculated, and the on-ramp vehicle is guided to merge into freeway mainline smoothly. The merging guidance program for freeway on-ramp vehicle based on CVIS are developed using the COM interface of Vissim, and the simulation experiments are carried out by setting the mainline and on-ramp traffic flow as low volume, medium volume and high volume, separately. Compared with the case without on-ramp vehicle, the results show that the proposed method can decrease the delay of on-ramp vehicles by 15.6%, 20.9% and 19.2% for low volume, medium volume and high volume, respectively, and decrease the traffic conflicts by 17.9%, 23.5% and 32.3%, respectively. The proposed method improves the traffic status of freeway on-ramp area effectively. traffic engineering; merging guidance; on-ramp; cooperative vehicle infrastructure system; freeway 2017-05-17 *国家自然科学基金项目(51578432)、武汉市青年科技晨光计划项目(2016070204010124)、云南省交通厅科技计划项目(2016A05)资助 U491.31 10.3963/j.issn.2095-3844.2017.04.001 张存保(1976—):男,博士,副研究员,主要研究领域为交通信息工程及控制、交通安全



3 仿真实验


4 结 束 语
