基于多AUV协作的稀疏水下传感网定位技术研究*
2017-09-08张美燕蔡文郁郑晓丹
张美燕,蔡文郁,郑晓丹
(1.浙江水利水电学院电气工程系,杭州 310018;2.杭州电子科技大学电子信息学院,杭州 310018)
基于多AUV协作的稀疏水下传感网定位技术研究*
张美燕1,蔡文郁2*,郑晓丹1
(1.浙江水利水电学院电气工程系,杭州 310018;2.杭州电子科技大学电子信息学院,杭州 310018)
如何在稀疏部署的水下传感器网络中实现传感器节点的高效定位是一个研究热点。提出了一种基于多个移动AUV协作的水下传感器网络内节点定位机制,利用AUV的精确自导航功能实现对网内未知位置节点的定位协助。提出的协作定位算法扩展了水下传感器网络的网内节点位置迭代估计方法,将信标节点和多AUV联合作为定位参考点,然后推导了基于最小二乘法的定位估计方程。仿真结果验证了该方法可以在定位节点比例、归一化定位误差和平均置信度等几个方面提高定位性能。
水下传感器网络;协作定位;迭代定位;多AUV
水下传感器网络USN(Underwater Sensor Networks)是由具有水声通信能力的传感器节点构成的自组织三维无线网络,可广泛应用于海洋资源勘探、海底灾害监测、意外搜索救援、辅助导航和战术反潜等领域,近几年引起了国内外相关研究人员的重点关注[1-2]。在水下传感器网络的水下通信技术、组网路由技术、安全可靠技术、定位与追踪技术等方面研究中,节点定位算法作为具有重要意义的支撑技术,成为了一大研究热点。众所周知,水下传感器网络所采集到的数据必须具有时间维度和空间维度信息才有价值,因此必须设计节点定位机制以达到尽量准确地获取水下传感器节点位置信息的目的。水下传感器节点一般都部署在恶劣的水下三维空间内,节点之间的水声通信延迟大、可靠性低,节点部署较为稀疏,网络连通性难以保证,陆地无线传感器网络的一些定位算法无法直接应用于水下传感器网络[3]。因此,如何依靠位置已知的信标节点和节点间水声通信获取未知节点的位置信息,从而为整个水下传感器网络提供定位服务是迫切需要研究的重要课题[4]。
目前的水下测距技术一般分为如下4种方式[5]:RSSI(接收信号强度指示)、AOA(信号到达角度)、TDOA(信号到达时间差)、TOA(信号到达时间)。目前的各种定位算法研究都采取了上述各种水下测距方法,其中TOA算法从定位精度和算法代价折中考虑性价比最高,因此作为本文的水下测距定位技术。文献[6]提出了一种新的基于相交环的两跳定位算法(IR2H),该算法利用同心环裁剪,缩小未知节点的定位区域,并通过两跳来定位节点,解决锚节点稀疏时会出现未知节点单跳定位困难的问题。文献[7]基于传统定位中常用的Chan算法,提出了一种改进的M-Chan算法,通过曲线拟合进行运动轨迹预测,并利用节点的移动特性修正估计值,从而提高了水下移动节点的定位精度。文献[8-9]针对水下三维传感器网络的特性,提出了一种利用信标节点定位普通节点,然后迭代上述方法实现整个水下传感器网络全网定位的机制,其分布式特性非常适合应用于大规模水下传感网,本文也借鉴这种思想研究水下传感器网络节点定位机制。但是上述的研究结果都是在水下传感器网络中节点部署较为稠密的假设条件下,实际应用中该假设并不一定始终成立。文献[10]针对无线传感器网络节点定位受环境干扰精度较差的问题,提出了一种将路径损耗因子根据实测环境进行动态修正的三边质心定位算法。但是这种方法无法应用于环境更为复杂的水下环境中。
随着自主水下航行器(Autonomous Underwater vehicle,AUV)越来越多地应用于水下传感器网络中,文献[11-14]提出了一些采用移动信标节点提高水下传感器网络节点定位性能的方法。由于AUV自身携带的捷联惯性导航系统(Strapdown Inertial Navigation System,SINS)、多普勒测速仪(Doppler Velocity Logger,DVL)、深度传感器和GPS浮标构成了精密的组合导航系统,还可以依靠信标节点的定位修正提高定位精度。文献[15]提出一种基于移动水平面估计的AUV定位方法,实验证明AUV的定位精度可达到2 m之内,因此可以作为移动信标节点协助水下传感器网络的网内节点定位。但是,文献[11-14]提出的采用移动节点或AUV辅助水下传感器网络定位研究中有些只单独采用了AUV辅助定位,没有综合考虑网内节点迭代定位方法,有些方法采用与一个AUV多次交互进行水声测距的方式,定位误差很大,因此对于传感器节点定位效果的提升并不明显。综上所述,本文提出了一种综合考虑网内信标节点、普通节点和多个移动AUV协助定位的协同定位算法,可以提高水下传感器网络内节点的定位性能。
1 基于多AUV协助的水下迭代定位算法
本文假设水下传感器网络中存在位置未知传感器节点、信标节点和多个AUV节点,因此基于多AUV协助的水下传感器网络框架如图1所示。信标节点主要用于辅助其他传感器节点进行定位,自身位置信息可以通过与多个水面GPS浮标节点之间的交互通信获取。AUV依靠自身所携带的惯性导航、多普勒仪、深度计等设备获取精确的自身位置,也可以与普通节点进行信息交互。普通节点通过参考节点或多个AUV之间的信息交互计算出自身的位置数据,从而成为参考节点,此处参考节点定义为信标节点与已定位传感器节点的集合。因此一旦已定位传感器节点成为参考节点,就可以辅助其他未定位传感器节点的定位计算过程。通过以上迭代过程,逐渐扩展到整个水下传感器网络,达到水下传感器网络所有节点全定位的效果。但是上述假设不一定始终成立,由于水下传感器节点价格昂贵,传感器节点一般采用稀疏部署方式,且信标节点的比例不会很高,因此保证整个网络的全定位非常困难。随着水下机器人技术的发展,利用多个AUV进行水下传感器网络移动数据采集的方式已经广泛应用,而AUV配备的自身导航设备具有精确的自定位能力。因此本文引入了多个AUV作为移动信标节点协助普通传感器节点进行定位,从而提高网络的定位覆盖率,提高水下传感器网络的定位精度和定位可靠性。

图1 多AUV协助的水下传感器网络框架
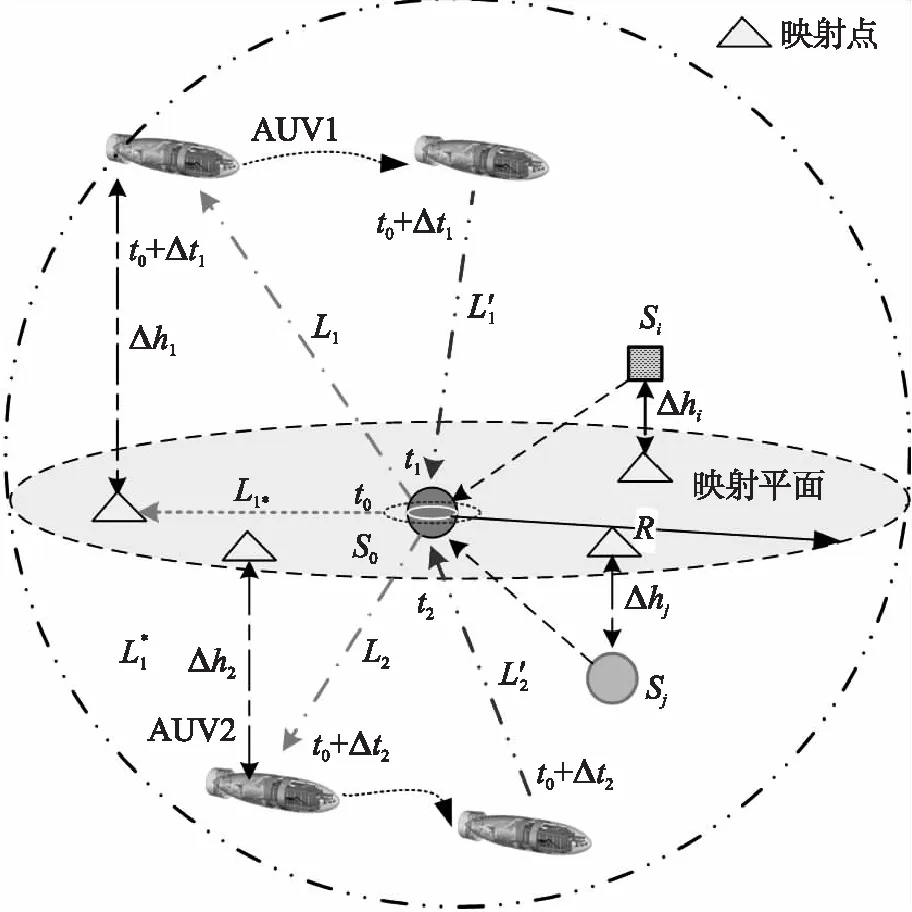
图2 多AUV辅助定位机制原理
多AUV辅助定位机制的原理如图2所示。假设位置未知节点S0处在信标节点Si、已定位节点Sj、两个AUV:AUV1、AUV2的覆盖范围内,利用TOA方法,未知节点S0很容易测得其与信标节点Si、已定位节点Sj的距离。未知节点S0与AUV1之间的距离L1采用往返双次TOA测距法,如式(1)所示:
(1)

(2)
与上式同理,可以获取未知节点S0与AUV2之间的距离L2:
(3)
由于水下传感器网络部署于水下三维空间内,传感器节点和AUV的深度数据都可通过自身携带的深度计获取,为了减低计算复杂度,本文将三维定位问题通过深度差映射方式投射到二维平面进行求解。假设未知节点S0的坐标为(x,y),其中有k个参考节点或AUV节点(其二维坐标为(xk,yk),与未知节点S0的深度差为Δhk)能覆盖到未知节点S0,未知节点S0与k个参考节点或AUV节点的距离分别为Lk,由此可得二维平面两点之间的距离公式:
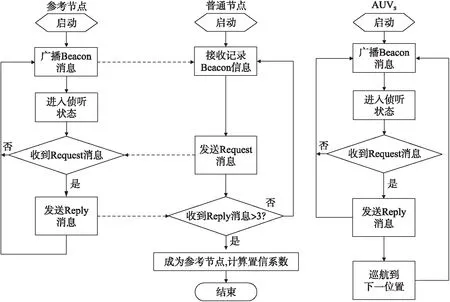
图3 多AUV协助的水下迭代定位算法流程图
(4)
前面k-1个公式分别减去最后一个公式,可得:
(5)


(6)
本文定义了置信度η(η≤1)来表征定位数据的可靠性,信标节点和AUV的置信度都为1,未定位节点的置信度为0,普通传感器节点被定位后,其置信度计算公式如下:
(7)
式中:ηi为能覆盖未知位置节点S0的参考节点或AUV的置信度,ρ为由于水下测距误差导致的衰减系数,与参考文献[8]相同,本文定义置信度衰减系数为:ρ=0.98。
本文提出的定位算法的整体流程如图3所示,普通节点通过与参考节点和AUV之间的水声通信交互实现TOA测量,然后通过循环迭代完成整个水下传感器网络的节点定位。根据上述的理论分析可知,只要普通节点能够获取至少4个参考节点或AUV的测距值,就可以计算出其位置信息,完成自身定位,后续可辅助其他未知位置节点进行迭代定位。
2 可定位性分析
假设水下传感器网络中的传感器节点集合{Si},i=1,2,…,Nsensor遵从密度为λ的泊松分布,‖Si‖为传感器节点的数量,Rcover为传感器节点的通信半径。在水下三维区域VROI=L×L×L内,传感器节点数量为γ的概率为:
(8)
本文定义传感器节点Si可定位的概率为Pi,那么水下传感器网络中所有节点都可定位的概率为所有传感器节点可定位概率的乘积:
(9)
而传感器节点Si的可定位概率为Pi等于两者的乘积,其一为节点Si的邻居节点NB(Si)数量大于等于k的概率,另一是节点Si的邻居节点NB(Si)的k个节点可定位概率乘积。
(10)
式中:Pi和Pj代表传感器节点Si和Sj的可定位概率,NB(Si)为传感器节点的Si邻居节点集合。Pr{NB(Si)≥k}计算如下:
Pr{NB(Si)≥k}=

(11)
式中:Vi表示以传感器节点Si为中心Rsensor为半径的球形区域,d(Si,Sj)表示传感器节点Si和Sj之间的欧几里德距离。
为了求解简单,本文借鉴了文献[16]中3D空间内的k覆盖问题求解方法,满足最低保证时节点空间分布密度为:
(12)
如图4所示,对于一个三维立方体区域500×500×500,不同k覆盖下的最少传感器节点数量如纵坐标所示,其中横坐标为传感器节点覆盖半径。本文所提出的基于多AUV协助的水下传感器网络定位算法要求k≥4。

图4 全定位覆盖率
3 仿真结果
本文采用 MATLAB构建仿真平台,实现算法的性能分析。仿真环境的主要参数设置如下:N个传感器节点(包含信标节点)和1个~3个AUV节点随机分布在区域半径为500×500×500的水下三维区域内,信标节点占传感器节点的比例p设置为5%/10%/15%。假设水下TOA测距的系统误差遵从正态分布,其最大误差幅值分别为测量距离值的1%/10%。传感器节点和AUV的水声通信距离设置为R,通过改变R值可改变水下传感器网络的节点平均度数(节点平均度数定义为网络中所有节点一跳范围内其他传感器节点数的平均值),从而表征水下传感器网络中节点部署的稀疏程度。AUV运动轨迹采用了随机行走模型,如式(13)所示。本文将AUV的每次运动周期定义为一轮(Round),仿真共进行了200轮。AUV移动一个时间间隔后悬停一段时间,用于采集传感器数据以及辅助定位。
(13)
式中:(x(t+1),y(t+1),z(t+1))和(x(t),y(t),z(t))分别表示AUV在t+1时刻和t时刻的位置,V表示AUV的运动速度,满足以Step为最大值的正态分布,θxy和 θz分别表示X-Y平面和Z平面的随机方向,仿真场景及AUV运动轨迹如图5所示,最大步进值Step=100时100轮的运动轨迹,图5(a)为较稠密部署(共有200个传感器节点),图5(b)为较稀疏部署(共有50个传感器节点)。
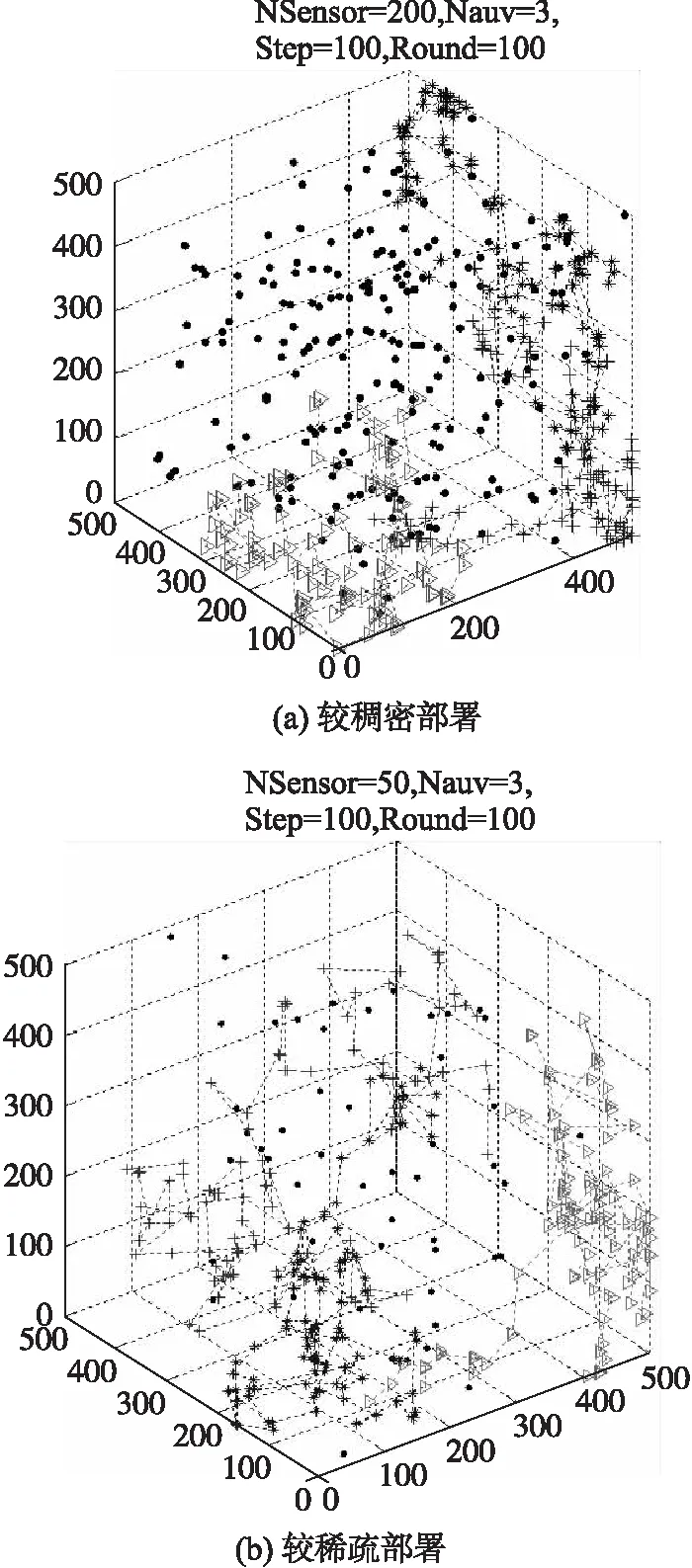
图5 仿真网络拓扑
本文定位算法的性能对比主要包含三项指标:定位节点比例、归一化定位误差和平均置信度。定位节点比例定义为最终获取位置信息定位节点占所有传感器节点(不包含信标节点)的比例。归一化定位误差定义为水下传感器网络中所有传感器节点定位误差的平均值(不包含未定位节点),以定位误差与区域半径500的比值进行归一化处理。平均置信度定义为水下传感器网络中所有传感器节点置信度的平均值(不包含未定位节点)。由此可见,定位节点比例高、归一化定位误差小和平均置信度大的定位算法性能最佳。
本文比较了3种算法(单纯依靠信标迭代定位—“信标定位”,信标定位和1个AUV辅助—“信标+1 AUV定位”,信标定位和3个AUV辅助—“信标+3 AUV定位”)的定位性能,定位节点比例、归一化定位误差和平均置信度的仿真结果分别如图6~图8所示,横坐标为水下传感器网络的平均节点度数,纵坐标分别为定位节点比例、归一化定位误差和平均置信度。定位节点比例和平均置信度与水下测距的系统误差无关,在仿真中设置都为1%。
由图6所示,节点定位比例随着节点平均度数的增加而明显增加,“信标+3 AUV定位”算法和“信标+1 AUV定位”算法比“信标定位”算法提高了定位节点比例,在信标比例较低时(p=5%)其定位提升效果更为明显。但是当水下传感器网络节点的平均度数过低时,水下传感器网络的节点定位比例过低,此时由于AUV采用了随机行走模型,虽然结果中节点定位比例有所提高,但随机性较为明显。
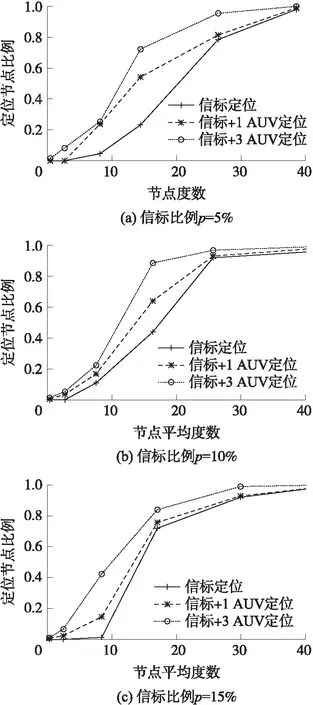
图6 定位节点比例对比
图7比较了不同信标比例条件下,节点平均度数为30和40,外加系统误差为10%和20%时,3种定位算法的归一化定位误差。由图7可见,归一化定位误差与外加的系统误差率接近,当系统误差为10%时,归一化定位误差在节点平均度数较大时反而有所增加,这是由于定位误差传递累计的结果,所以当定位误差量值在1%左右时,定位误差的累积效应不明显。无论系统误差率为1%还是10%,“信标+3 AUV定位”算法和“信标+1 AUV定位”算法相比“信标定位”算法可以降低归一化定位误差,而3个AUV作用下的结果也明显优于只有1个AUV作用的结果。由图8所示,平均置信度随着节点平均度数的增加而增加,“信标+3 AUV定位”算法和“信标+1 AUV定位”算法比“信标定位”算法提高了平均置信度,在信标比例较低时(p=5%)系数提高非常明显(最大可达到300%),但是当信标比例较高和节点平均度数较大时,平均置信度提高较少。
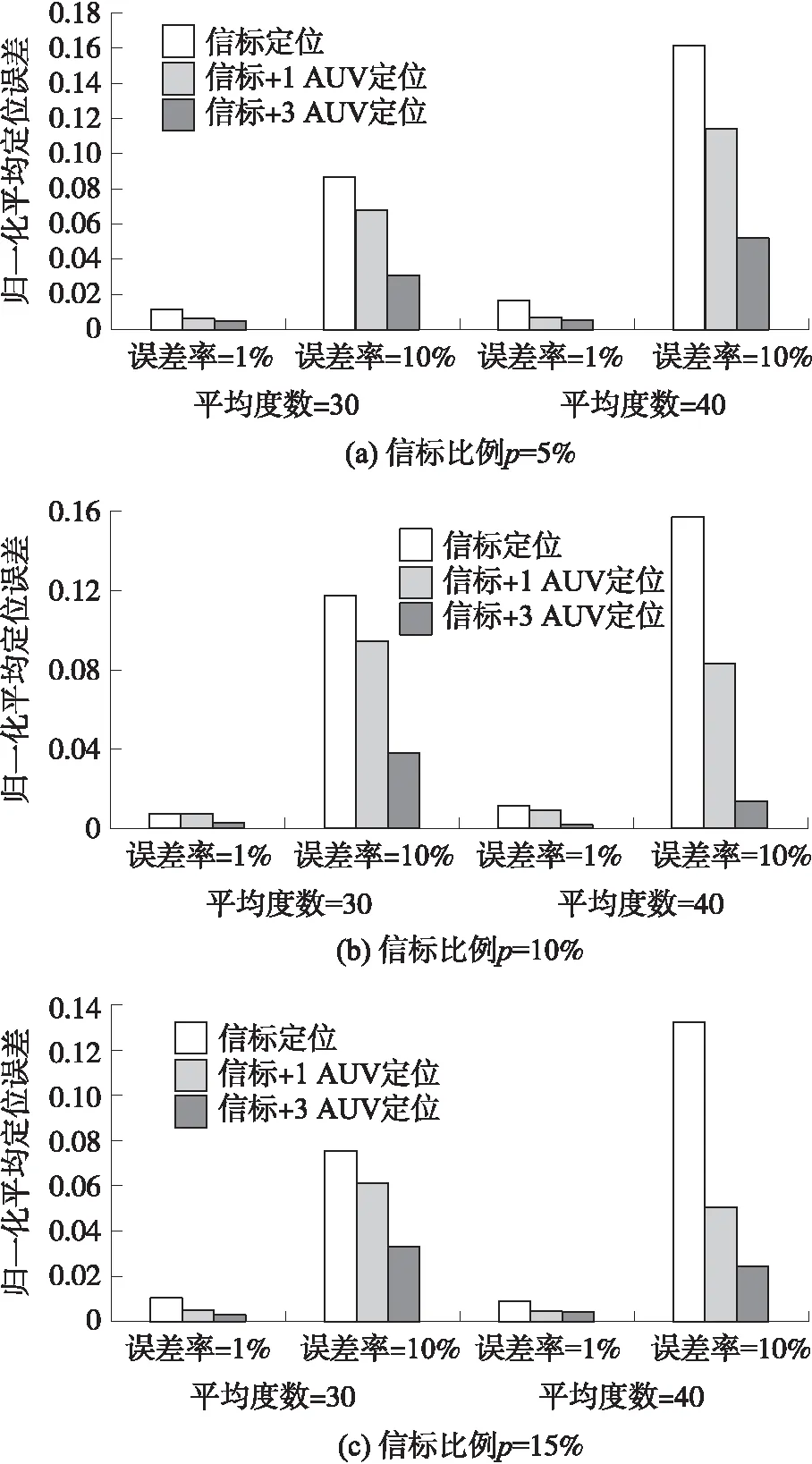
图7 归一化定位误差对比
综上所分析,在传感器节点和信标节点的循环迭代定位基础上,依靠多个AUV的定位协助效果,可以提高定位节点比例、归一化定位误差和平均置信度。综合分析图6~图8的结果可以发现,本文提出的算法特别适用于具有节点稀疏部署特征(即节点平均度数不是非常高)的水下传感器网络中,作为一种信标迭代定位的辅助定位技术,在信标比例值合适的情况下,可以明显地提高定位的覆盖度、精度与可信度,总体定位性能有明显提高。
上述仿真结果并没有深入考虑AUV的定位误差以及网络节点部署更为稀疏情况下的性能改善,本节比较节点较为稀疏的网络部署(平均度数20)下、AUV定位误差为2单位时的定位性能提升效果。仿真结果如图9所示,由于AUV的辅助定位功能,定位归一化误差会有所降低,但是由于考虑了AUV的定位误差,所以实际归一化误差会较大。
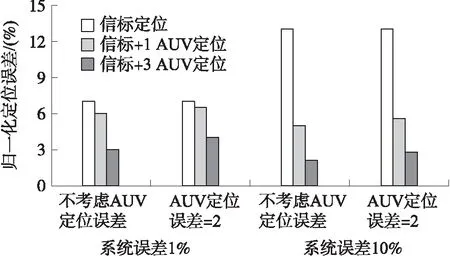
图9 定位归一化误差比较(信标比例p=15%,Rcover=200)
4 结语
本文研究了如何利用多个AUV辅助水下传感器网络节点定位的问题,建立了基于多AUV协助定位的理论模型,推导了水下传感器网络节点全定位的概率分析,仿真结果表明该定位算法可以提高节点定位比例、归一化定位误差和平均置信度等几方面性能。由于本文研究模型中假设AUV采用了随机行走模型,因此对定位性能具有一定的随机性影响,下一步工作将研究如何规划AUV运动轨迹,使得AUV尽量趋向未定位节点浓度高的区域巡航,以提高整体水下传感器网络的定位性能。
[1]Akyildiz I,Pompili D,Melodia T. Underwater Acoustic Sensor Networks:Research Challenges[J]. Ad Hoc Networks. 2005,3(3):257-279.
[2]Wang K,Gao H,Xu X L,et al. An Energy-Efficient Reliable Data Transmission Scheme for Complex Environmental Monitoring in Underwater Acoustic Sensor Networks[J]. IEEE Sensors Journal,2016,16(11):4051-4062.
[3]Erol-Kantarci M,Mouftah H T,Oktug S. A Survey of Architectures and Localization Techniques for Underwater Acoustic Sensor Networks[J]. IEEE Communications Surveys and Tutorials,2011,13(3):487-502.
[4]Zhao L,Stan E D,Sun D J. Motion-Compensated Acoustic Localization for Underwater Vehicles[J]. IEEE Journal of Oceanic Engineering,2016,41(4):840-851.
[5]Erol-Kantarci M,Mouftah H T,Oktug S. Localization Techniques for Underwater Acoustic Sensor Networks[J]. IEEE Communication Magazine,2010,48(12):152-158.
[6]单志龙,胡燕. 基于相交环的水下无线传感器网络节点自定位研究[J]. 传感技术学报,2012,25(4):536-540.
[7]胡钢,张瑞,刘宴佳. 水下传感器网络移动节点定位问题研究[J]. 传感技术学报,2012,25(2):268-272.
[8]Zhou Z,Cui J H,Zhou S. Efficient Localization for Large-Scale Underwater Sensor Networks[J]. Elsevier Ad Hoc Networks,2010,8(3):267-279.
[9]Patrick Carroll,Kaleel Mahmood,Shengli Zhou,and et al. On-Demand Asynchronous Localization for Underwater Sensor Networks[J]. IEEE Transactions on Signal Processing,2014,62(13):3337-3348.
[10]张宏刚,黄华. 基于RSSI路径损耗因子动态修正的三边质心定位算法[J]. 传感技术学报,2016,29(11):1731-1736.
[11]Erol M,Vierira L F M,Gerla M. Localization with Dive’N’Rise(DNR)Beacons for Underwater Acoustic Sensor Networks[C]//Proceedings of Second ACM Int’l Workshop Underwater Networks(WUWNET),Sep. 2007:97-100.
[12]Erol M,Vieira L,Gerla M. AUV-Aided Localization for Underwater Sensor Networks[C]//Proceedings of the 2nd International Conference on Wireless Algorithms,Systems and Applications,Chicago,IL,Aug. 2007:44-54.
[13]Luo H J,Guo Z W,Dong W. LDB:Localization with Directional Beacons for Sparse 3D Underwater Acoustic Sensor Networks[J]. Journal of Networks,2010,5(1):28-38.
[14]Sangho Lee,Kiseon Kim. Localization with a Mobile Beacon in Underwater Acoustic Sensor Networks[J]. Sensors,2012,12:5486-5501.
[15]Sen W L,Chen D B,Gu H S,et al. Cooperative Localization of AUVs Using Moving Horizon Estimation[J]. IEEE/CAA Journal of Automatic Sinica,2014,1(1):68-76.
[16]Habib M A,Sajal K D. A Study of k-Coverage and Measures of Connectivity in 3D Wireless Sensor Networks[J]. IEEE Transactions on Computers,2010,59(2):243-257.

张美燕(1983-),女,硕士,副教授,从事无线传感网络、新型能源技术、物联网技术等研究,主持和参与浙江省自然科学基金2项,浙江省公益性行业专项3项,浙江省水利厅科技项目2项,参与浙江省厅级项目多项。近年来发表论文20余篇,被三大索引收录论文10余篇,申请发明专利和实用新型专利20余项;
蔡文郁(1979-),男,博士,副教授,主要从事物联网、无线传感网及嵌入式技术研究。主持和参与国家自然科学基金2项、浙江省自然科学基金3项、浙江省公益性行业专项3项,国家863计划项目2项、国家海洋局行业专项1项、浙江省重大科技专项1项,横向课题10余项。近年来发表论文40余篇,被SCI/EI收录20余篇,申请专利及软著40余项,授权30余项,dreampp2000@163.com。
Cooperative Localization with Mobile AUVs for SparseUnderwater Sensor Networks*
ZHANGMeiyan1,CAIWenyu2*,ZhengXiaodan1
(1.School of Electrical Engineering,Zhejiang University of Water Resources and Electric Power,Hangzhou 310018,China)2.School of Electronics and Information,Hangzhou Dianzi University,Hangzhou 310018,China)
Efficient localization of underwater sensor networks with sparse deployment sensor nodes is still an active topic for researchers. One cooperative localization mechanism for 3D underwater sensor networks is proposed,which derives greater benefit from accurate position ability of multiple AUVs to help un-localized sensor nodes to be localized. The proposed cooperative mechanism introduces a recursive localization estimation method using anchor nodes and mobile AUVs together,and then deduces Least Square based position estimation equation in 2D horizontal plane projected from 3D region. Simulation results verify that the proposed cooperative localization algorithm can improve localization efficiency in terms of localization coverage ratio,normalization localization error and average confidence factor.
underwater sensor networks;cooperative localization;iterative localization;Multiple AUVs
项目来源:浙江省自然科学基金项目(LY16F030004,LY15F030018);国家自然科学基金项目(6170060208)
2017-01-01 修改日期:2017-04-20
TP393
A
1004-1699(2017)08-1274-07
C:6150P
10.3969/j.issn.1004-1699.2017.08.024
