基于低成本超声传感器的无线传感网生存环境地图构建研究*
2017-09-08李林茂魏丁丁
王 巍,李林茂,魏丁丁
(1.河北工程大学信息与电气工程学院,河北 邯郸 056038;2.江南大学物联网技术应用教育部工程中心,物联网工程学院,江苏 无锡 214122)
基于低成本超声传感器的无线传感网生存环境地图构建研究*
王 巍1,2*,李林茂1,魏丁丁1
(1.河北工程大学信息与电气工程学院,河北 邯郸 056038;2.江南大学物联网技术应用教育部工程中心,物联网工程学院,江苏 无锡 214122)
移动传感器网络节点在监测环境过程中,采集到大量有误差的环境地图数据,导致构建的传感器网络生存环境地图质量低、实时性差。针对以上问题,提出了一种适用于低成本、轻数据量、多网络节点的基于超声传感器组的环境地图构建算法。首先对超声波测量数据进行高斯滤波处理,其次利用处理后的数据进行单一网络节点所属区域地图的构建,再次提取单一节点地图的点特征,并进行匹配,进而得到融合后的全局地图,最终实现传感器网络节点生存环境地图的构建。进一步通过优化子图拼接顺序,降低了构图数据与实际环境数据的误差,提高了传感器网络节点生存环境的地图质量。
传感器网络;地图融合;移动节点;子图优化
在未知复杂环境下,传感器网络节点借助超声波、红外、视觉以及声纳等传感器进行环境监测,将测得数据分析处理转换为环境地图信息,然后将各个节点地图进行拼接,最终构建出传感器网络生存环境地图。地图信息不仅可以由超声波、红外测得的距离数据描述,还可以由视觉传感器[1-3]拍摄的图像展现。不同的数据类型,有着不同的构图方法和地图拼接算法。程争刚[4]等人针对现有航拍图像拼接方法处理速度较慢的问题,提出一种基于无人机位姿信息的快速拼接方法,从机载GPS和惯性导航单元获得无人机航拍时的坐标和姿态角,根据每一幅航拍图像对应的无人机坐标和姿态角计算它们之间的单应变换矩阵,实现航拍图像之间的快速配准。然后通过单应变换矩阵的运算得到拼接图像之间的配准,最后完成多幅图像的拼接得到整个区域的全景图。Li J[5]提出了一种基于点线特征的二维自由激光扫描匹配方法,对不同特征点扩展一维SIFT,通过改进的分割和合并算法提取线特征,实现一个同时定位和地图系统的室内测绘。
图像拼接时会出现明显的拼接线与过渡带,针对该问题,张勇[6]等人提出一种改进的SIFT特征点匹配的图像拼接算法,该算法在特征提取的过程中加入Harris角点算子,筛选出鲁棒性较强的点。采用基于圆形窗口的48维向量来进行特征降维,并借助匹配特征点对之间的几何一致性来对特征点进行粗提纯,提高算法运行效率;最后采用重叠区域线性过渡融合算法对图像进行平滑过渡,消除拼接缝隙。李海洋[7]提出一种改进的基于SURF特征匹配的图像拼接算法。在剔除误配点时,采用改进的随机抽样一致(RANSAC)算法调整采样概率,以更少的时间获取正确模型,提高算法效率。在图像融合时,先对输入图像进行亮度均衡预处理,然后再使用加权平滑算法进行融合,从而消除结果图的拼接线和过渡带,提高图像拼接质量。
针对图像匹配算法计算量大,实时性差的问题,张懿[8]提出了一种基于FAST特征的快速图像配准系统。该系统首先通过FAST特征进行配准,然后通过改进的RANSAC算法增加配准准确率,最后通过加权融合完成图像拼接。李玉峰[9]等人提出了一种基于区域分块与尺度不变特征变换(SIFT)相结合的图像拼接算法。该算法利用图像能量的归一化互相关系数快速分割出匹配图像与待匹配图像间的相似区域,利用SIFT算法在重叠区域中搜索出能用于匹配的图像特征点并实现快速精确配准。然后,通过对图像进行了几何校正和图像融合来实现图像序列间的无缝拼接。张旭[10]提出将图像分离,减少背景特征点,并采用FAST和BRIEF相结合的图像匹配算法,保障了拼接效果和拼接效率。
相较于视觉传感器的高质量图片数据,超声波传感器[11]有着低成本、轻数据量、不受光线等因素影响的优点。韩霜[12]设计并实现了一种基于射频与超声波信号到达时间差的高精度室内定位系统,用于无线传感器网络中节点的定位和跟踪。系统中位置固定的信标节点周期性同步发射射频信号与超声波脉冲,待定位的移动节点测量接收到的射频和超声波信号的到达时间差,并将此数据采用分时的方式发送至中心控制主机。刘金全[13]以超声衰减理论为基础,提出一种基于广义最小残差(GMRES)迭代的超声层析成像重建算法:首先利用广义极小残差迭代算法获取初始物体浓度分布信息,然后采用均值滤波并设定灰度门槛的方法对其进行修正以提高图像精度。
本文结合数据类型、数据量、实时性、成本等多方面因素,选择在节点上安装超声波传感器组,实现环境信息采集功能,利用无线传感器模块将环境信息传输给上位机,上位机对数据分类处理、绘制出对应单一节点地图,将各个节点地图拼接,实现数据的融合[14],进而完成整个环境信息地图构建。
1 模型建立
1.1 环境探测模型
传感器网络单一节点上均匀分布了个N超声波传感器,超声波传感器之间的角度为θ=2π/Nrad,由于超声波具有声波的扇形发射特性,且安装时会带来角度误差,因此对距离的精准探测产生影响,设误差为Δθ。环境探测模型如图1所示。
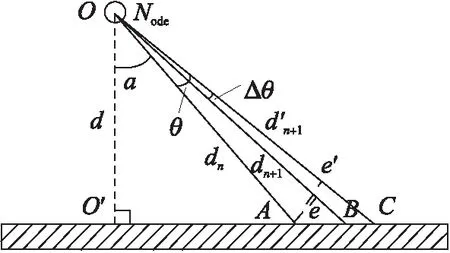
图1 环境探测模型

在理想状态下,测量某一固定边界时,安装在单一节点上不同位置的超声波传感器所测距离关系如下:
(1)
超声波传感器在受到外界干扰时,量测数据具有不可靠性,为此需要对数据预处理。在第i个数据采集周期中,对于网络节点上的第n个超声波传感器,其量测数据的可靠性可以通过对第n-1与第n+1个传感器的量测数据综合后评估。由式(1)可得相邻数据的递推关系为:
(2)
e=|dn+1(T)-dn(T)|
(3)
(4)

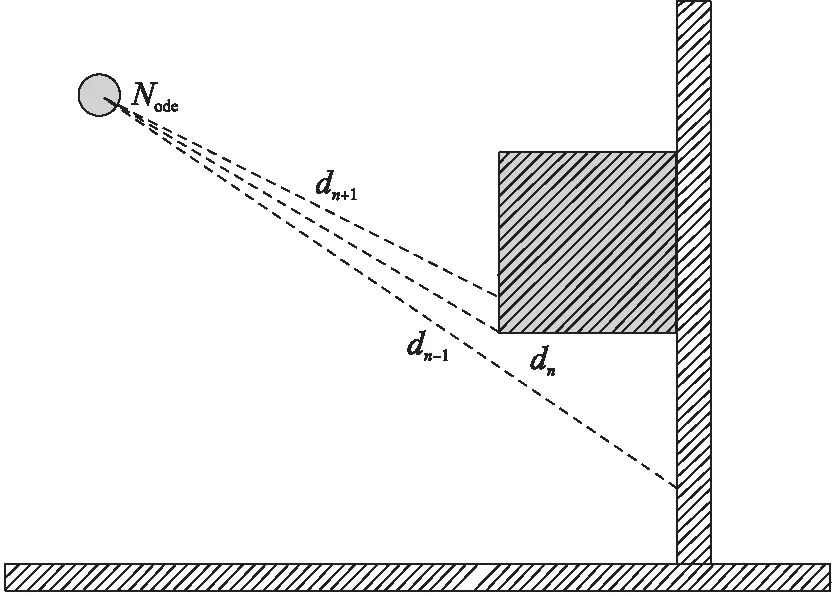
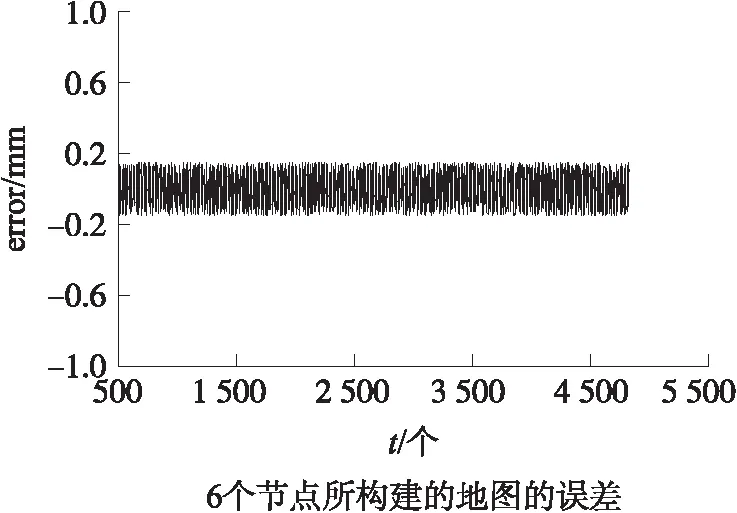
当测量无偏时,e′=e,但是在实际中,由于温度传感器参数漂移和安装误差,导致e′>e或e′ 1.2 数据采集模型 Δe的大小主要是受温度传感器精度和温度传感器误差影响,距离数据信息是通过超声波传感器获得的,计算公式如下: (5) 式中:v为超声波速度,t为超声波往返时间。 由于超声波传感器测距会受到温度的影响而造成估计距离与测量距离不等,为此采用温度补偿和高斯滤波的方式对测量距离进行修正,公式如下: (6) ΔT=T-T0 (7) ΔT=ΔT0±P·ΔTe⟹ΔT~N(μ,δ2) (μ=ΔT,δ=ΔTe) (8) 式中:v0为超声波在15 ℃环境下的传播速度,v0=340m/s,T0为基准温度,T为测得温度。ΔT为温度差,ΔT0为实际温差,ΔTe为测量温度误差。v(T)=v0(T)+a·(ΔT0±P·ΔTe)℃=vμ(T)+vδ(T) (9) (10) 由式(10)可知,超声波测距数据由dμ(T,t)和dδ(T,t)两部分构成,其中dμ(T,t)为单一节点在温度为T的环境下测得的数据,作为基准距离;dδ(T,t)为温度误差造成的偏差,作为误差距离。通过对误差距离进行修正,提高测量精度,保障数据的可靠性。 因为Δe的大小主要是受温度传感器精度和温度传感器误差影响,因此有以下关系: Δe=λ1dμ(T,t)+λ2dδ(T,t) (11) 式中:λ1和λ2为控制系数,该参数的设置是为适应实际环境中边界的平滑性,即当边界不平滑时,通过参数λ1和λ2来调节Δe取值,防止有效数据的误剔除。 图2 边界和顶点数据提取 2.1 特征提取 近年来特征提取的方法不断的优化,但是多数研究是针对图形的。尽管图形也是能够转换为数据信息,但是图形的数据量远远超过单纯的距离数据集,而数据量的多少直接影响到运算速度。针对距离数据类型,采用点特征提取方式,通过对距离数据进行分析,提取出特征点。 由图2(a)中可以看出,数据点从左端点到右端点的变化趋势是,从大到小,再从小到大的变化,在垂直时最小。因此相邻3个数据点有以下3种关系: (12) (13) 以上两种模型结合能够提取出特征点,借助垂直边界特征点能够定位节点坐标,进而对自身坐标进行修正。 在有障碍物时,节点的探测数据将会变的更加复杂,这时就会出现障碍物的边界点和断点等情况,模型如图3所示。 从图3中可以得出以下关系: (14) 从上述几个关系式中,可以提取出障碍物的边界点、边界的顶点以及节点到边界的垂直点,三者可以通过相邻点之间的差值大小加以分类。 图3 障碍物数据关系模型 2.2 特征匹配 单一节点在移动过程中会记录移动距离sj和旋转角度γj,通过N次的运动将生存环境遍历。通过对记录数据和采集数据进行分析,转换为二维坐标数据点,即将采集的距离数据集转换为坐标点集,进而便于图形的构建。转换方程如下: (15) 第k个节点的第j次运动采集的坐标点集构成了第kj次子地图,通过对所有子地图的构建、旋转变换、平移变换实现全局地图构建。子地图构建完成后,需要进行特征匹配,从而确定旋转变换和平移变换的参数。特征匹配的方式选择欧式匹配,即比较最近邻距离与次近邻距离的SIFT匹配方式,核心思想是取一幅图像中的一个SIFT关键点,并找出其与另一幅图像中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离得到的比率ratio少于某个阈值T,则接受这一对匹配点。 欧式距离匹配对所有的特征点进行筛选,选取两幅图片中有效的特征点。确定有效特征点后,需要对特征点进行分析,进而确定转换矩阵,将两组图进行拼接,如图4所示。 图4(a)和图4(b)为两子地图数据,其中图4(a)中红色与绿色圆表示对数据进行分析后得到的特征点,通过对环境信息的分析,提取的特征点主要分布在边界的顶点和边界断点位置,表明模型的有效性。图4(b)则是采用欧式距离进行匹配特征点,并剔除无效点后的结果。特征点的剔除,能够有效的降低地图拼接的运算时间,提高拼接质量。 图4 子地图特征点选取和剔除 2.3 地图拼接 地图的拼接是将其中一个地图作为基准,将另一个子地图进行平移、旋转变换,进而完成拼接。子地图坐标转换方程如下: (16) 优化目标最大重合点数优化参数θ、px和py适应度函数if(∑‖P′-P‖<0.1)N(i)=N(i)+1fitness(i)=max[N(i)] 其中P=(x,y),P′=(x′,y′),适应度函数为最大重合点个数,最优结果是通过比较两幅子图之间的重合点个数来确定。 3.1 实验流程 无线传感网生存环境地图构建流程图如图5所示。 3.2 实验分析 本实验采用能力风暴UII型机器人本体作为传感网节点平台,其参数如表1所示。 实验平台尺寸/cm轮系轮距/cm质量/kg通信方式能力风暴UII20×20×10两轮161无线 基于该实验平台配合超声波传感器实现地图数据采集功能,并通过无线模块将地图数据传输给上位机。上位机为win7(32位)系统,利用MATLAB(2012b)对各个节点采集的数据集进行处理,构建出各个节点子图。通过本文所提出的算法对子图点特征进行提取和匹配,然后对子地图变换矩阵参数进行优化,选取最优解,最终实现地图拼接。实验环境和网络节点如图6所示。 图6 实验环境与网络节点 图6中可以看出实验环境由6个移动节点和多条边界构成,符合现代建筑特征。本次实验环境由边界构成的障碍物具有明显的顶点特征和边界断点特征,有助于对特征点提取是否正确的判定。除此之外,传感器网络生存环境地图构建与实际环境相比较,能够通过观察直接判断地图构建的优劣。 边界上点的个数直接影响到边界探测的精度,为此以边界长度和覆盖点数为指标,进行边界覆盖密度的计算,以保证探测的精度。 图7为单一节点上超声波传感器检测信息与实际环境信息进行对比分析,记录每个边界上点的个数和边界长度,并计算出探测边界的检测点的平均覆盖密度。单一节点所处位置和边界长度导致重合点数量的差异。 图7 子图与环境信息重合点数和平均覆盖密度 通过对单一节点超声波数据进行数据分析和处理,将距离-角度信息转化为坐标点信息,实现子图的构建。实验结果如下: 图8为各个节点地图,地图中红色点代表单一节点采集的数据点,蓝色点代表单一节点基准坐标,绿色圆圈为特征点。由上述几幅图可知,节点探测位置的不同,探测到的数据集将会发生变化,数据集的变化直接影响到子地图的构建以及子地图特征点的数量。 图9是基于map4进行的两两地图拼接实验结果,从图中可以看出,第2幅图的拼接效果不理想,造成该现象是因为两幅地图相关性小、特征点少。 由图10可以看出,基于某一个子图来实现地图的拼接效果偏差,不能够满足实际需求。因为基于某个子地图的地图拼接方式受限于特征点的数量和子地图之间空间位置关系,提高地图拼接质量可以从子地图的选取以及所选两两拼接子地图位置关系两方面改进。 本实验通过对子地图的选取方式进行改良算法,主要思想是将基于任意一个子图为基准完成的最优拼接结果视为整体的局部最优,通过对任意两个子图的拼接效果和拼接的顺序进行分析,选取一组最优的拼接顺序。 由图11可以看出,通过改良拼接方式能够明显的提高地图的拼接效果。地图的拼接不仅能够提升地图的完整程度,还能够有效的提高边界测量精度,改善地图质量。 图12是子图拼接后,数据点与环境信息的误差值。图13是全局地图数据误差,在4 m×4 m环境下,数据误差控制在2 mm以内能够满足对地图质量要求。 图8 各个节点地图 图9 基于map4的两两拼接 图10 基于map4地图拼接结果 图11 最优拼接结果 图12 节点地图数据误差 图13 全局地图数据误差 综上所述,本文通过对节点环境信息进行了研究和分析,构建出各个节点地图,实现了节点地图的拼接,通过对拼接算法的优化,提高了地图拼接质量和地图精度,降低了环境地图数据误差。相较于基于视觉传感器搭建的无线传感网,基于超声波传感器组的无线传感网有着低成本、轻数据量以及实时性好的优点。实验结果表明该方法能够解决图形拼接数据量大、运算量大的问题,能够满足地图构建的实时性要求,为传感器网络的研究做出了贡献。 [1]卢旭,刘军,袁飞. 基于移动Sink的自组织视频传感网络目标跟踪算法[J]. 传感技术学报,2016,29(9):1430-1434. [2]郭丹,王学民,王瑞云,等. 基于双目立体视觉的舌重建[J]. 传感技术学报,2016,29(9):1317-1322. [3]Ni Jianjun,Wang Chu,Fan Xinnan. A Bioinspired Neural Model Based Extended Kalman Filter for Robot SLAM[J]. Mathematical Problems in Engineering,2014,2014(2014):235-254. [4]程争刚,张利. 一种基于无人机位姿信息的航拍图像拼接方法[J]. 测绘学报,2016,45(6):698-705. [5]Li J,Zhong R,Hu Q,et al. Feature-Based Laser Scan Matching and Its Application for Indoor Mapping[J]. Sensors,2016,16(8):1265-1286. [6]张勇,王志锋,马文,等. 基于改进SIFT特征点匹配的图像拼接算法研究[J]. 微电子学与计算机,2016,33(3):60-64. [7]李海洋,张睿哲. 一种改进的基于SURF特征匹配的图像拼接算法[J]. 太原理工大学学报,2016,47(1). [8]张懿,刘艺. 基于FAST特征的快速图像拼接系统研究[J]. 计算机工程与应用,2016,52(10):167-170. [9]李玉峰,李广泽,谷绍湖,等. 基于区域分块与尺度不变特征变换的图像拼接算法[J]. 光学精密工程,2016,24(5):1197-1205. [10]张旭,高佼,王万国,等. 基于显著图的输电线路杆塔图像拼接方法[J]. 计算机应用,2015,35(4):1133-1136. [11]刘建华,刘华平,杨建国,等. 测距式传感器同时定位与地图创建综述[J]. 智能系统学报,2015,10(5):655-662. [12]韩霜,罗海勇,陈颖,等. 基于TDOA的超声波室内定位系统的设计与实现[J]. 传感技术学报,2010,23(3):347-353. [13]刘金全,苏明旭,田昌,等. 基于GMRES的超声过程层析成像算法研究[J]. 传感技术学报,2013(10):1395-1400. [14]Santos J M,Couceiro M S,Portugal D,et al. A Sensor Fusion Layer to Cope with Reduced Visibility in SLAM[J]. Journal of Intelligent and Robotic Systems,2015,80(3):401-422. Research on Mapping the Living Environment of the Wireless SensorNetwork Based on the Low Cost Ultrasonic Sensor Group* WANGWei1,2*,LILinmao1,WEIDingding1 (1.School of Information and Electrical Engineering,Hebei University of Engineering,Handan Hebei 056038,China;2.Engineering Research Center of Internet of Things Technology Applications of the Ministry of Education,School of Internet of ThingsEngineering,Jiangnan University,Wuxi Jiangsu 214122,China) In the process of monitoring the environment,the mobile sensor network nodes collect a large number of environment map data with errors,which cause that the environment map quality is low and the real-time performance is poor. In allusion to the problems mentioned above,this paper proposed an algorithm for environmental maps with low cost,lightweight data and multiple network nodes based on the ultrasonic sensor group. Firstly,the ultrasonic measurement data is processed by Gauss filter. Secondly,to construct the partial maps with the processed data and the feature points can be extracted from the single node maps and be matching,and then the fused global map could be obtained. Finally it realized the construction of the sensor network node survival environment. Moreover,it improves the map quality of the sensor network node’s living environment by optimizing the sequence of the sub images stitching,which can reduce the errors of the composition data and the actual environment data. sensor network;map fusion;mobile node;sub-graph optimization 王 巍(1983-),男,汉族,博士,副教授,硕士研究生导师,主要研究领域为物联网理论与技术、人机交互、计算智能,wangwei83@hebeu.edu.cn;李林茂(1989-),男,汉族,硕士研究生,主要研究领域为物联网、无线传感器网,578013849@qq.com。 项目来源:国家自然科学基金资助项目(61402147);河北省自然科学基金项目(F2015402108);河北省教育厅科学研究计划项目(QN20131152);河北省物联网数据采集与处理工程技术研究中心开放课题项目;江苏省博士后科研资助计划项目(1601085C);邯郸市科学技术研究与发展计划项目(1625202042-1) 2016-12-15 修改日期:2017-03-22 TP391 A 1004-1699(2017)08-1258-09 C:7230 10.3969/j.issn.1004-1699.2017.08.022
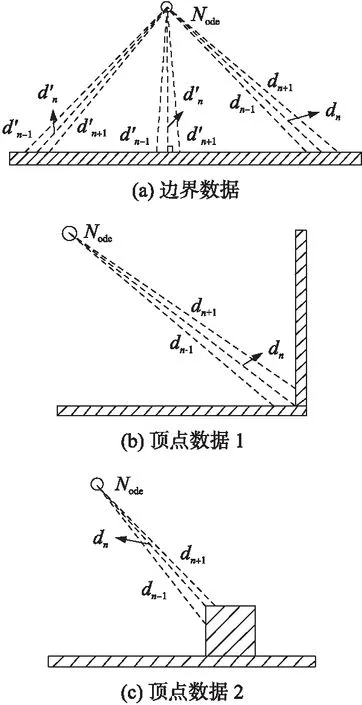
2 特征匹配
3 实验





4 总结