基于自适应SR-CKF的序贯式WSNs目标跟踪算法*
2017-09-08陈孟元
陈孟元
(1.安徽工程大学安徽省电气传动与控制重点实验室,安徽 芜湖 241000;2.中国科学技术大学精密机械与精密仪器系,合肥 230027)
基于自适应SR-CKF的序贯式WSNs目标跟踪算法*
陈孟元1,2*
(1.安徽工程大学安徽省电气传动与控制重点实验室,安徽 芜湖 241000;2.中国科学技术大学精密机械与精密仪器系,合肥 230027)
针对无线传感器网络(WSNs)动态目标跟踪问题,即通过对传感器获取的动态系统状态进行估计,预测目标的位置。提出一种基于自适应平方根容积卡尔曼(SR-CKF)的序贯式WSNs动态目标跟踪算法。该算法在运算过程中直接传递目标状态均值和协方差矩阵的平方根因子,降低了计算的复杂度。将目标跟踪过程序贯式地分配到动态簇集的每一个节点上,减小了无线通信过程中碰撞和干扰现象的发生,降低了节点通信和计算负担。针对不良观测信息,基于新息协方差匹配原理,建立了自适应SR-CKF,提高了整个系统的鲁棒性。实验仿真结果表明,本文提出的基于自适应SR-CKF的序贯式WSNs目标跟踪算法有效的提高了跟踪的精度和稳定性并且减小了传感器节点间通信的能量损耗。
无线传感器网络;簇头;容积卡尔曼滤波;平方根滤波;目标跟踪
无线传感网络WSNs(Wireless Sensor Networks)作为一项无线通信和传感检测技术相互交融的新兴技术,已经成为国防军事,生物医疗,生产生活,交通管理等领域不可或缺的力量[1-4]。随着人们的研究领域不断拓宽,目标跟踪技术已经成为当前研究的热门问题之一。其实质是无线传感器网络节点间通过相互协作和信息共享完成对动态目标的跟踪[5-6],与其他跟踪方式相比跟踪更隐蔽、及时、可靠。WSNs中通常含有大量随机散布的传感器节点,多传感器节点间协同工作提高效率和容错率的同时也带来了一系列的困难和挑战。如:传感器的计算能力、携带的电池容量有限、外界环境干扰和节点是否处于感知和激活状态等问题都对无线传感网络的应用提出了新的要求。
目前已有多种解决WSNs环境下动态目标跟踪问题的方法。Madaan[7]等基于Kalman算法提出能量有效动态目标跟踪算法。采用最小化节点能量消耗,预测更新动态目标的位置,实现了对于动态目标的跟踪。但是目标状态的线性观测如何获取问题,没有给出具体的解决方案。Tolga[8]等基于Kalman滤波器采用分布式数据关联方法,传感器节点进行局部Kalman滤波。通过节点间的相互协作,实现对动态目标位置的预测,但是为了保证传感器节点局部滤波器的趋同,节点间需要进行多次数据关联,因此会造成较大的能量损耗。文献[9]采用基于扩展卡尔曼滤波EKF(Extended Kalman Filter)的分布式多传感器调度算法,利用扩展卡尔曼滤波器,通过最小化期望方差,选择激活状态的传感器节点,实现对目标的有效跟踪,但EKF滤波需要准确的噪声统计及目标运动模型,在现实工程应用中,可能会导致滤波发散,甚至目标丢失等问题。文献[10]提出基于无迹卡尔曼滤波UKF(Unscented Kalman Filter)的WSNs节点动态跟踪算法。采用四圆区域定位交叉和UKF算法,提高资源利用率,但是UKF在高维系统中会出现精度下降及数值不稳定问题。针对EKF和UKF滤波算法存在的缺陷,文献[11]将容积卡尔曼滤波CKF(Cubature Kalman Filter)应用于动态目标跟踪,提高了目标跟踪的精度。文献[12]将平方根容积卡尔曼滤波SR-CKF(Square Root Cubature Kalman Filter)引入目标跟踪,提升了系统的稳定性。文献[13]在传感器网络的组织方式上采用动态簇(Dynamic Cluster)结构,形成一个局部节点群,在动态簇族内引入信息驱动思想,仅使簇族内节点处于激活工作状态,有效减小了能量损耗。
基于以上内容本文提出基于自适应SR-CKF的序贯式WSNs目标跟踪算法。将跟踪过程序贯式地分配到动态簇族的每一个节点上,针对系统不良观测信息,基于新息匹配原理,引入自适应系数。通过仿真实验可以得出,与标准SR-CKF算法和SR-UKF算法相比较,本文所提出的算法在精度和稳定性都有所提升,同时在相同的实验环境下同与标准SR-CKF对比实验中,自适应SR-CKF的序贯式WSNs目标跟踪算法,在能耗方面体现出了较大优势,进一步验证了该算法的可操作性和有益效果。
1 系统描述
当目标物进入WSNs监控区域后,由多个传感器节点构成的跟踪簇形成,为了确保序贯式跟踪条件以及节点间的协同工作,做出以下假设:①节点定位是WSNs采集数据的基础环节,没有确切的监测节点位置WSNs目标跟踪也就失去了意义。通过三边定位法、三角定位法[14]等WSNs节点定位算法每个节点已知自身及周边节点的相对坐标信息。②每个传感器节点的测量类型相同,能够有效的进行数据处理和融合。③目标物出现后,处于激活状态的传感器节点能立刻发起簇构建信号,形成动态跟踪簇。
在WSNs监控区域,处于激活状态的节点观测到目标物并构成跟踪簇,当前动态跟踪簇集中第一个传感器节点从前一时刻的跟踪簇最后一个传感器节点接收目标物前一时刻的跟踪结果。然后该节点运用SR-CKF算法更新目标物的状态信息,下一步利用各个传感器节点的观测值逐步对前一时刻跟踪结果进行更新,最后该节点选择并将目标物更新后的系统状态发给下一跟踪簇集。重复上述过程,最终得到全局信息的最优估计值及其对应的误差矩阵平方根。上述跟踪过程,如图1所示。
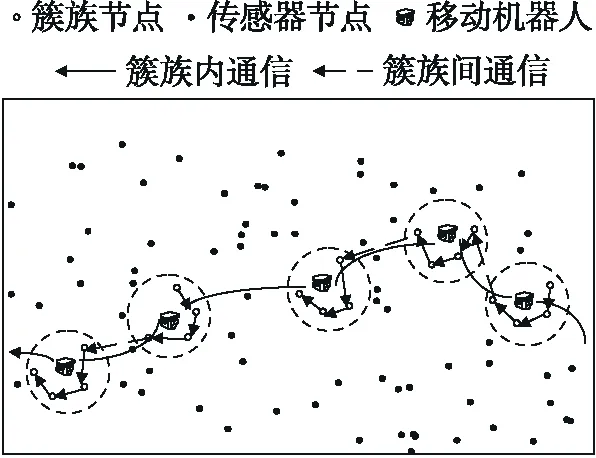
图1 跟踪过程示意图
1.1 目标运动模型
目标物在二维平面无线传感网络监控范围运动时,设Xk=[x(k),y(k),xv(k),yv(k)]T表示k时刻目标物的系统状态,其中x(k)、y(k)分别表示k时刻目标物的横坐标、纵坐标,xv(k)、yv(k)分别表示目沿X方向和Y方向的运动速率。目标物的运动模型可以表示为:
Xk=f(Xk-1)+wk-1
(1)
式中:Xk∈Rn为n维的向量,表示k时刻系统状态向量;f表示系统的状态转移矩阵;wk-1为运动噪声,其方差为Qk,服从于N(0,Qk)的高斯分布。
1.2 传感器节点观测模型

(2)
式中:
(3)
式中:(x(k),y(k))表示目标物的估计位置坐标,(xi,yi)表示已知任务节点i的位置坐标信息。hi表示第i个传感器的观测矩阵。vi∈Rm为m维的向量,表示第i个传感器的观测噪声矩阵,其方差为Rk,服从于N(0,Rk)的高斯分布。
2 自适应SR-CKF序贯式WSNs目标跟踪算法
2.1 SR-CKF序贯式WSNs目标跟踪算法
SR-CKF算法基于卡尔曼滤波框架,将复杂的计算通过一组等权值的容积点来代替,SR-CKF算法[16],运用三阶容积准则选取2n个具有相同权值的容积点进行近似计算,其容积点集(ξj,wj)可表示为:
(4)
因为WSNs传感器节点数据处理与通信时间远远小于采样间隔时间,因此可以运用基于SR-CKF的序贯式滤波算法对无线传感网络覆盖区域动态目标物的系统状态进估计和更新。该滤波算法的框图如图2所示。
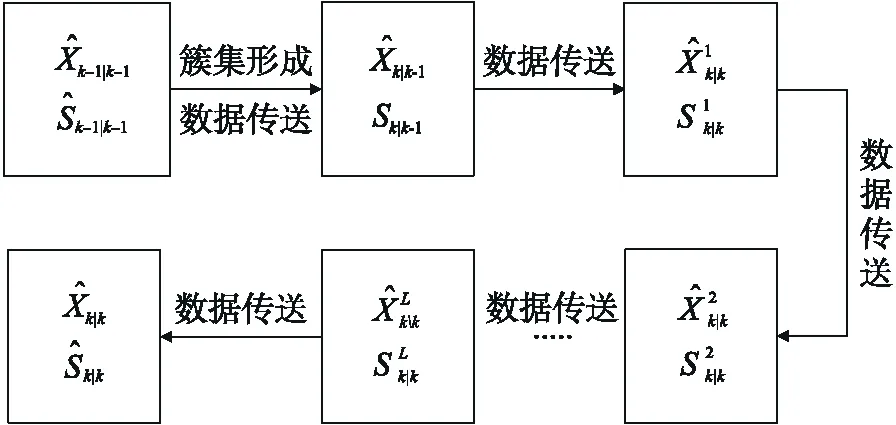
图2 算法框图
2.1.1 预测阶段

(5)
(6)
式中:j为容积点序号,j=(1,2,…,m, m=2n)。
(7)
(8)
(9)
(10)
2.1.2 更新阶段


(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)

(22)
(23)
(24)
(25)
(26)
(27)
(28)
(29)
(30)
(31)
(32)
(33)
(34)
2.2 自适应SR-CKF
SR-CKF算法测量条件的改变会影响加速度变化率的估计,产生的不良观测信息会造成参数估计误差增大甚至滤波故障,为提高系统应对不同观测信息的能力,引入自适应系数[13],构建观测噪声比例系数的自适应SR-CKF。设:
(35)
Pzz,k|k-1=Pz,k|k-1+μkRk
(36)
则:
(37)
(38)
计算自适应系数μk:
(39)
(40)
(41)
为了在SR-CKF和自适应SR-CKF之间建立选择机制,引入两元选择,γ0、γ1分别代表选择SR-CKF算法和自适应SR-CKF算法。设:
(42)
式中:统计函数βk~χ2(ρ)为ρ维的新息向量,若观测数据质量精度为δ,可得:
(43)

可得SR-CKF算法和自适应SR-CKF算法之间的选择机制:
3 仿真实验与分析
3.1 仿真环境及参数
通过MATLAB仿真验证所提出的WSNs目标跟踪算法,实验环境为一个50m×50m的WSNs矩形区域,包含100个随机稠密分布的传感器节点。假设所有传感器节点具有相同的通讯半径rc=10m,感知半径rs=4m,传感器节点的采样时间间隔Δt=0.2s,网络初始化已完成,传感器节点位置已知。目标在WSNs矩形区域内沿着一条给定路径运动。
3.2 仿真结果及性能分析
在相同的实验环境下,将本文提出的基于自适应SR-CKF的序贯式WSNs目标跟踪算法与基于SR-CKF的WSNs目标跟踪算法和基于SR-UKF的WSNs目标跟踪算法进行对比,并分析了实验数据。3种算法目标运动轨迹与观测轨迹图3所示。
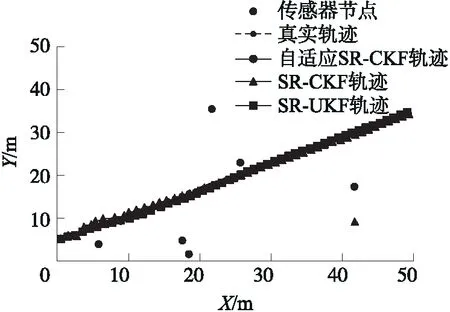
图3 目标运动轨迹与观测轨迹
图3中虚线路径为目标真实行进轨迹,实线路径目标估计路径。其中目标真实路径附近的圆圈轨迹表示自适应SR-CKF算法目标估计路径,三角形轨迹表示SR-CKF算法目标估计路径。方块轨迹表示SR-UKF算法目标估计路径。
为了更清晰的将3种算法的实验仿真结果进行比对,将图3局部放大得到图4。
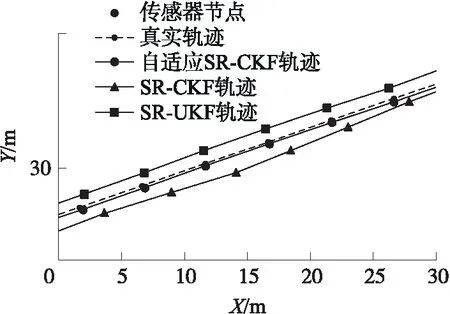
图4 局部放大图
不同算法的目标估计路径与目标真实行进轨迹越接近,即表明跟踪精度越高。从图2和图3中可以看出本文提出的基于自适应SR-CKF的序贯式WSNs目标跟踪算法目标估计路径与目标真实行进轨迹与标准SR-CKF-WSNs目标跟踪算法[12]和SR-UKF-WSNs目标跟踪算法[10]相比更接近真实行进轨迹。即表明本文提出的基于自适应SR-CKF的序贯式WSNs目标跟踪算法,对于目标轨迹估计更准确。
3.2.1 跟踪误差分析
本文采用目标真实位置与其估计位置之间的距离即目标轨迹估计时产生的均方根误差对目标跟踪时的精度进行误差分析。
均方根误差RMSE(Root-Mean Square Error)的计算公式为[16]:
(44)

由图5可以看出基于SR-UKF的WSNs目标跟踪算法的估计误差最大。由于利用新息协方差匹配原则建立了针对不良观测信息的自适应SR-CKF并且通过动态跟踪簇节点中点到的序贯数据通信方式,减小了无线通信过程中碰撞和干扰现象的发生,所以基于自适应SR-CKF的序贯式WSNs目标跟踪算法的误差则低于其他两种。图6为3种算法的平均跟踪误差对比,可以看出基于自适应SR-CKF的序贯式WSNs目标跟踪算法跟踪误差最小,精度最高,且数值滤波发散的问题得到有效的控制,进一步验证了该算法的有效性和精确性。
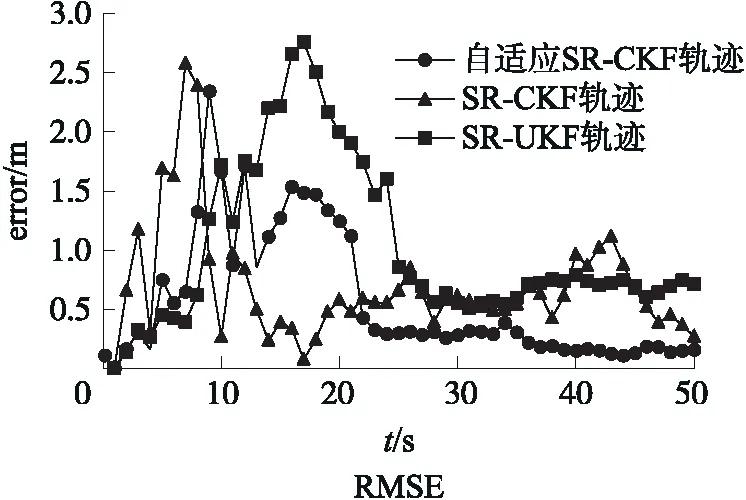
图5 均方根误差对比
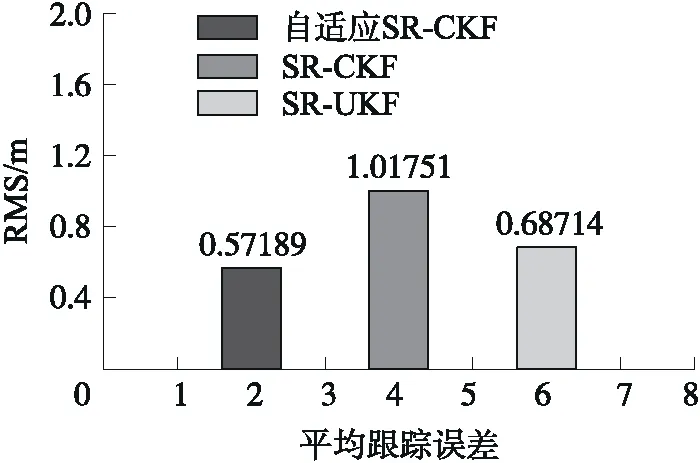
图6 平均跟踪误差对比
3.2.2 运行时间及能耗分析
表1为3种算法200次仿真实验的平均运行时间,由表1可以得到,在3种算法中序贯式SR-UKF平均运行时间最长,自适应序贯式SR-CKF算法的平均运行时间要稍高于序贯式SR-CKF。

表1 3种算法平均运行时间
能量损耗问题在无线传感网络中至关重要,一是因为节点本身的能源供应十分有限,二是因为多数节点为一次性节点,不能再充电,从这个角度上来讲,能耗问题成了关乎传感网节点、乃至整个网络生命期长短的问题。本文针对可避免能耗即冗余操作带来的能量消耗进行了仿真对比实验。图7为分别采用自适应序贯式SR-CKF和标准SR-CKF的动态簇头节点能量损耗比较。由图7可以看出采用序贯式SR-CKF动态簇族节点点到点之间进行数据通信,减小了无线通信过程中碰撞和干扰现象的发生,降低了节点通信和计算的复杂度,明显降低通信能量的损耗。
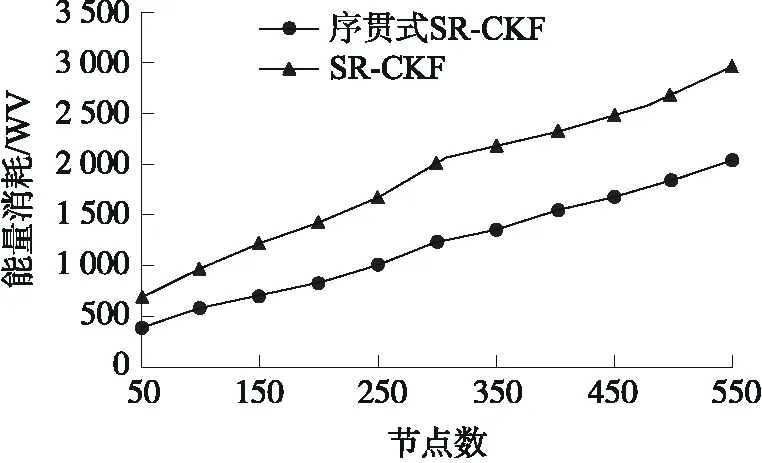
图7 簇头节点能量损耗
4 结论
本文提出的基于自适应SR-CKF的序贯式WSNs目标跟踪算法,充分利用了WSNs的动态性和强大的计算能力,为无线传感网络环境下实现动态目标跟踪提供了可能。该算法将目标跟踪过程序贯式地分配到动态簇族的每一个传感器节点上,减小了无线通信过程中碰撞和干扰现象的发生,降低了节点通信和计算负担。针对系统不良观测,基于新息协方差匹配原理,引入自适应系数,建立了自适应SR-CKF,提高了整个系统的稳定性,进一步提高了目标跟踪的精度。在大规模无线传感网络环境下对本文提出的算法进行实验验证将是下一步工作的重点。
[1]Qu H,Hou G,Guo Y,et al. Localization with Single Stationary Anchor for Mobile Node in Wireless Sensor Networks[J]. International Journal of Distributed Sensor Networks,2013(1):74-82.
[2]Wang R J,Bao H L,Chen D J,et al. 3D-CCD:a Novel 3D Localization Algorithm Based on Concave/Convex Decomposition and Layering Scheme in WSNs[J]. Ad Hoc and Sensor Wireless Networks,2014(23):235-254.
[3]景荣,孔令富,孔德瀚. 一种时间约束的多机器人WSNs节能数据收集方法[J]. 仪器仪表学报,2015(6):1257-1266.
[4]汤文俊,张国良,曾静,等. 适用于稀疏动态无线传感器网络的并行融合分布式无迹信息滤波算法[J]. 控制理论与应用,2016(6):1-12.
[5]陈延军,潘泉,王征. 无线传感器网络目标跟踪性能优化及仿真[J]. 传感技术学报,2015,28(4):544-550.
[6]左现刚,张志霞,贾蒙. 基于分布式聚类的有向传感器网络移动目标跟踪算法研究[J]. 传感技术学报,2016,29(7):1096-1101.
[7]Madaan A,Makki S K,Osborne L,et al. An Intelligent Energy Efficient Target Tracking Scheme for Wireless Sensor Environment[C]//5th IEEE International Symposium on Wireless Pervasive Computing(ISWPC),2010:93-97.
[8]Onel T,Ersoy C,Delic H. Information Content-Based Sensor Selection and Transmission Power Adjustment for Collaborative Target Tracking[J]. IEEE Transactions on Mobile Computing,2009,8(8):1103-1117.
[9]Xiao W,Zhang S,Lin L,et al. Tham,Energy-Efficient Adaptive Sensor Scheduling for Target Tracking in Wireless Sensor Metworks[J]. Journal of Control Theory and Applications,2010(8):86-92.
[10]姚依翔,谢俊元. 基于UKF区域交叉定位的WSNs Sink节点动态跟踪算法[J]. 传感器与微系统,2015(4):123-126,129.
[11]金长江,张兵,曹祥杰. 基于容积卡尔曼滤波的异类多传感器一致性融合算法[J]. 传感技术学报,2016,29(7):1006-1010.
[12]李宁,祝瑞辉,张勇刚. 基于Sage-Husa算法的自适应平方根CKF目标跟踪方法[J]. 系统工程与电子技术,2014(10):1899-1905.
[13]刘立阳,张金成,吴中林. 基于分布式动态簇结构的WSN自适应目标跟踪算法[J]. 传感技术学报,2012,25(1):110-113.
[14]石欣,印爱民,张琦. 基于K最近邻分类的无线传感器网络定位算法[J]. 仪器仪表学报,2014(10):2238-2247.
[15]李朕阳,郎朗,陈孟元. 基于SR-CKF的移动机器人动态目标跟踪算法[J]. 电子测量与仪器学报,2016(8):1198-1205.
[16]戴雪梅,郎朗,陈孟元. 强跟踪平方根容积卡尔曼滤波SLAM算法[J]. 电子测量与仪器学报,2015,29(10):1493-1499.
The Sequential WSNs Target Tracking AlgorithmBased on Adaptive SR-CKF*
CHENMengyuan1,2*
(1.Anhui Polytechnic University,Anhui Key Laboratory of Electric Drive and Control,Wuhu Anhui 241000,China;2.Univ Sci and Technol China,Dept Precis Machinery and Precis Instrumentat,Hefei 230027,China)
Based on adaptive square root cubature kalman filter(SR-CKF),a sequential WSNs dynamic target tracking algorithm is proposed in this paper to solve the problem of dynamic target tracking in wireless sensor networks(WSNs),which estimates the states and predicts the target location sensors that acquire from dynamic systems. The computational complexity is reduced by transferring the mean of the target state and the factors to the square root of covariance matrix directly. By allocating the object tracking to each node of the dynamic cluster set,collision and interference in wireless communication are also reduced and node communication and computational burden are also lowered. Based on covariance matching principle,an adaptive SR-CKF is built to improve the robustness of the whole system under circumstance of the adverse observational information. The simulation shows that the sequential WSNs tracking algorithm can effectively improve the tracking accuracy and the tracking stability and reduce the communication energy dissipation of wireless sensor nodes.
wireless sensor networks;cluster headst;cubature kalman filter;square-root filter;target tracking
项目来源:2016年安徽高校自然科学研究项目(KJ2016A794)
2016-11-19 修改日期:2017-01-25
TP393;TN92A
A
1004-1699(2017)08-1220-06
C:7230
10.3969/j.issn.1004-1699.2017.08.016
