浇包出液口液柱图像特征参数构建方法研究
2017-09-01杨慧英
杨慧英
(1.东北大学 信息科学与工程学院,沈阳110004;2.沈阳理工大学 自动化与电气工程学院,沈阳110159)
浇包出液口液柱图像特征参数构建方法研究
杨慧英1,2
(1.东北大学 信息科学与工程学院,沈阳110004;2.沈阳理工大学 自动化与电气工程学院,沈阳110159)
视觉浇注系统浇包出液口处图像经处理后提取的特征可以为后续浇口杯钢水液位识别和浇包塞杆启动控制提供判断依据。本文对比了单摄像头和垂直双摄像头两种方式获取的图像利用全局阈值分割和形态学算法去噪等预处理后构建出特征参数的情况,通过对比分析双摄像头方式构造的参数可以更好的为液位识别提供依据。
视觉浇注;图像处理;参数构建
熔模铸造时浇口杯中的液位与钢水浇包的流速流量是影响铸造产品品质的参数。浇注现场高温、高粉尘使得人工作业环境十分恶劣,工人工作强度大,因此基于机器视觉的方式代替人眼实现对浇口杯中的液位判断,由自动浇注系统控制浇包的流量与流速符合行业发展的需求,有利于提高铸件生产效率、优化钢水用量节省投料、节约成本,减轻工人的劳动强度与减少用工人数。
1 视觉浇注系统图像采集单元
视觉浇注系统图像模块分为浇包出口处熔融态钢液的获取与IPC内图像处理识别两大部分[1]。图1右上所示为某一帧的浇注液柱原始图;图1右中图为浇注结束后造型机推型传送过程的图像;图1右下图为砂型浇注浇口杯俯视图像。摄像单元获取的图像还需要上传到IPC中进行图像前处理,最后提取出有利于浇口杯中钢水液位检测的特征参数。在图像获取光学结构的搭建过程中,本文研究了单目和垂直双目的两种摄像头搭建样式并对两种方式下采集到的图片构建出的特征参数进行对比得出较优的参数构建方法。

图1 视觉浇注系统图像采集单元结构示意图
2 图像的前处理与特征参数的构建方法
图2是浇注原始图灰度化处理后得到的灰度图像,图2a是自动浇注系统某铸型开始浇注阶段摄像头Camera1获取的某帧图像,图2b和图2c分别是两个相互垂直的摄像头Camera1与Camera2时刻t获取的浇注过程图像。存在以下问题:1)浇注过程中自上而下的液柱宽度不等宽,实时浇注过程中液柱呈现出的不规则性也为浇注参数的构建带来一定难度;2)浇注过程中由于钢水液柱冲击浇口杯内壁会随机产生飞溅液体,这些飞溅出来的液体对后续图像识别过程造成了干扰。
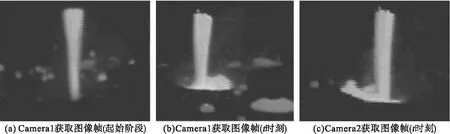
图2 灰度图像
图2灰度图像要进一步进行二值化与去噪两种图像前处理[2],预期能够得到较好的参数构建基础。阈值分割的原理如公式(1)所示。

(1)
式中:f(x,y)表示原始灰度图像;g(x,y)表示阈值分割后的结果;T为分割用阈值,T的选取可以选用最佳阈值法、双峰法[3]等。
在铸件浇注过程中视觉检测单元所用的算法要求快速给出结果才能满足实际生产需求,为此选用双峰法对灰度图像进行阈值分割。图3为图2b所对应的灰度直方图,由灰度直方图可见在灰度值小于150的区域有一个明显的灰度聚集高峰区;灰度值大于150的区域也有灰度聚集小高峰区。由于浇注图像目标与背景对比明显,且在视频序列中连续多帧的灰度图所对应的灰度直方图具有相似双峰灰度分布特点,为此经过人工反复试错选取灰度值为150即可将图像分割为图4所对应的二值化结果。
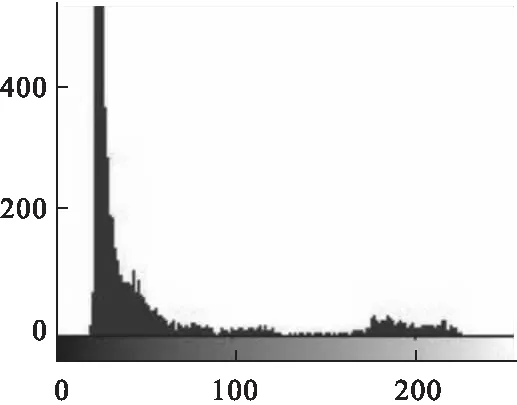
图3 浇注图像灰度直方图
由图4可见,二值化后将图像分割成浇注钢液和背景两部分,同时阈值的选择也可以将图2灰度图像浇口杯周围的飞溅液滴区域进行初步去噪。飞溅出的钢水是干扰噪声,由于飞溅出来后温度会迅速降低,所以从灰度图图2中可以看出飞溅出的液体和浇注主体灰度不同。为此在阈值分割后(见图4),可以将一部分飞溅去除。同时观察图4还有一部分白色小连片区域或是白色点状区域仍然存在在浇口杯周围,为此将继续采用下面形态学开运算继续去噪。
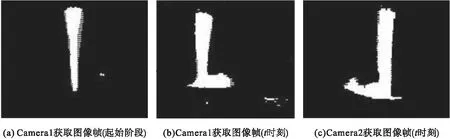
图4 二值化结果

腐蚀运算公式:AΘB={x|(B)x⊆A}
(2)
膨胀运算公式:

(3)
开运算公式:A∘B=(AΘB)⊕B
(4)
由图4二值化结果可见,为了不破坏浇注液柱的形态特征,同时又去除白色飞溅液体区域,本文选择小于液柱宽度的值作为边长的正方形作为形态学开运算的结构元素,开运算处理结果如图5所示。
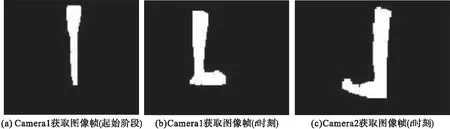
图5 液柱图像形态学处理结果
由图5可见,浇注主体区域得到了突出,白色飞溅经过开运算已经去除掉。去噪过程中,发现结构元素的选取会影响实验结果,但是作为识别液柱图像参数构造,要尽可能保持干扰被去除,同时保持液柱图像特征信息不丢失。最后在图5的基础上采用关心窗口区域进行参数建模[5-6]。
3 液柱参数构建方法对比研究与实验结果分析
图6为图像采集单元原理,图7为参数构建原理。

图6 图像采集单元原理
研究发现若浇包流出的钢水液柱的横截面积是规则图形,那么可以利用公式(5)对钢水液柱特征参数V进行构造。实际中从钢水液柱图像的预处理结果可以看出,液柱图像的侧面是上下不等宽的形状,说明实际的钢水液柱的横截面应该也是一系列大小不等形状近似的截面图形,公式(5)可以进一步表示为公式(6)、(7)更贴切。
(5)

(6)
(7)
式中:V为特征参数;d为关心窗口中浇注液柱的宽度;d1和d2为双目摄像方式预处理后两个关心窗口中的浇注液柱宽度;h为关心窗口的高度。理想状态下认为关心窗口中的液柱宽度不变,实际处理中则将关心窗口中的液柱分若干层后累加构造特征参数V(见公式(7))。

图7 参数构建原理
图8为利用前文所述方法对原始采集到的液柱图像进行预处理结果,图8a为Camera1获取的图像预处理结果,图8b为Camera2获取的图像预处理结果。

图8 关心窗口中最终图像预处理结果
利用公式(5)公式(6)与公式(7)得到的液柱参数构造结果如表1所示。

表1 两种方法下参数构建对比 像素
通过对比分析表1所示数据,可以得出利用P1和P2两个关心区域图像构造出来的液柱参数V比单独利用P1或是P2区域构造出来的液柱参数更有利于下一步浇包体积流量参数的研究。铸件浇注过程中浇包下方的孔口出流的体积流量Qv如公式(8)所示[7]。可见体积流量的检测可以通过检测浇包中钢水液位问题,如何测得钢水液位基于视觉方式的方法可以通过获得可视的浇注液柱参数V反推得浇包中液位h,如图9所示可得公式(9)。因此公式(8)则可推导为公式(10),公式中S为浇包的横截面积,H为浇注起始时浇包中的钢水满液位,h为浇包内实时液位,n为上文所述的关心窗口区域每次全更新时候采集的动态图像的帧数。

图9 孔口出流示意图
(8)
Sh+nV=SH
(9)

(10)
利用视觉方式构造表1中参数,该参数可以表征实际浇包孔口出流后关心窗口区域的体积V,因此视觉方式下构造出的关心窗口液柱参数在体积流量的检测中起到了作用,体积流量的检测是进一步浇包的塞杆控制决策依据之一,为此本文研究的液柱构造方法有后续应用意义。
4 结论
分别利用单目摄像头和垂直双目摄像头两种图像采集方式获取了浇包注入浇口杯段的关心窗口区域图像,基于浇注过程钢水液柱的形态特征,利用两种方式获得的图像分别构建了液柱特征参数,对比两种方法认为垂直双目摄像头构建出的特征参数比较接近于向下液柱的实际特征。进一步研究将侧重于如何利用双目视觉的方式或是如何利用2D多角度图像构造3D场景参数以达到为下一步浇包体积流量的检测和塞杆的控制提供更优判断依据的目标。
[1]薛迎成,王春晖.带计算机视觉教正的示教再现控制[J].上海交通大学学报,2001,35(2):301-304.
[2]薛迎成,潘俊民.自动浇注铁水液面满高度时图象预处理方法[J].传感器技术,2002,21(1):11-13.
[3]Rafael C Gonzalez,Richard E Woods.Digital Image Processing[M].阮秋琦,阮宇智等译.第二版.北京:电子工业出版社,2002:51-52,423-425.
[4]中志强,陈韬,钱基业,等.基于形态学的冷轧薄板板型识别[J].重庆大学学报,2007,30(12):25-28.
[5]Y Sugimoto,K Yano,K Terashima.Liquid level control of automatic pouring robust by twodegree-of-freedom control[C]//IFAC 15rh Triennial World Congress.Barcerlona,Spain,2002:34-38.
[6]Wang Yongguo,Miao LI-gang.Automatic Pouring System for Metal Casting Based on Learning from Example[J].Foundry Technology,2010,31(11):1503-1506.
[7]刘俊杰.红外辐射时间差动态铁水垂直流速检测的研究[D].沈阳:东北大学,2016:12-14.
(责任编辑:马金发)
ResearchontheConstructionMethodofCharacteristicParametersoftheLiquidColumnfromtheLadleOutlet
YANG Huiying1,2
(1.Northeastern University,Shenyang 110004,China;2.Shenyang Ligong University,Shenyang 110159,China)
The molten steel volume of ladle is an important parameter for auto-pouring system based on machine vision.It is the fundamental of judging the level of sprue cup and the stopper rod start-stop time.By comparing the images obtained by single camera and binocular camera,the global threshold image segment algorithm and the morphological image denoising algorithm are applied to creat the characteristic parameters.Simulation results show that it is a more optimal way of judging sprue cup leve by binocular camera image.Keywordsauto pouring by machine vision;image processing;parameter construction
2016-06-07
辽宁省教育厅项目(L2015468)
杨慧英(1982—),女,讲师,博士在读,研究方向:机器视觉、物体红外辐射特性。
1003-1251(2017)04-0024-04
TP2;TG2
A
